









提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
在现代的数字化世界中,点云数据成为了许多领域中重要的数据源,例如地理信息系统、遥感、地质勘探和三维建模等。为了更有效地存储和处理点云数据,出现了许多不同的点云格式。本文将重点介绍一种近两年发布的一种大数据组织的点云格式——Cloud Optimized Point Cloud(COPC 云优化点云)。该格式是2021年发布的一种符合LAS标准的以八叉树形式组织的一种大数据点云格式,COPC的数据组织与EPT点云(Potree所使用格式)类似。不同的是EPT格式的元数据、八叉树结构及各分块点云位于不同文件,而COPC的头信息,树结构描述及数据存储在单个.laz文件中,COPC仅支持LAZ点格式,不支持bin二进制格式。
一、COPC格式实现
COPC可以被看作是对传统的LAS(LiDAR数据交换标准)格式的改进和扩展。相比于LAS格式,COPC提供了更高的数据压缩率和更快的数据访问性能。这得益于COPC的层次结构以及数据压缩和索引技术的应用。八叉树组织的COPC点云与LAZ1.4标准点云的区别有以下方面:
- copc格式必须包含LAS PDRF 6、7或8格式数据
- copc格式必须包含信息VLR
- copc格式必须包含层次结构VLR
信息VLR
必须是文件中的第一个VLR,必须从文件头偏移量375开始,类实现如下:
class CopcInfo
{
public:
public:
static const int VLR_OFFSET = 375; // COPC信息VLR必须在偏移量为375的LAS头块后的第一个VLR.
static const int VLR_SIZE_BYTES = 160; // COPC信息VLR的数据结构大小为160字节, https://copc.io/
CopcInfo() = default;
CopcInfo(const lazperf::copc_info_vlr& copc_info_vlr);
lazperf::copc_info_vlr ToLazPerf(const CopcExtent& gps_time) const;
std::string ToString() const;
friend std::ostream& operator<<(std::ostream& os, CopcInfo const& value)
{
os << value.ToString();
return os;
}
double center_x{ 0 };
double center_y{ 0 };
double center_z{ 0 };
double halfsize{ 0 };
double spacing{ 0 };
uint64_t root_hier_offset{ 0 };
uint64_t root_hier_size{ 0 };
};
层级结构VLR
类似与EPT格式,COPC存储的层次结构信息可以在读取时定位到特定的八叉树节点,与EPT类似,该层次结构可能为分页存储,应至少包含一个层次结构页。
VLR数据由一个或多个层次结构页组成,可有如下类表示:
/// @class VoxelKey
/// @brief 节点键值,深度,x,y,z
/// @note
class DATA_EXPORT VoxelKey
{
public:
using Vector3 = lax::Vector3d;
using Box = lax::BoundingBoxd;
VoxelKey(int32_t d, int32_t x, int32_t y, int32_t z) : d(d), x(x), y(y), z(z) {}
VoxelKey() : VoxelKey(-1, -1, -1, -1) {}
VoxelKey(const std::string& key) { fromString(key); }
VoxelKey(const std::vector<int32_t>& vec)
{
if (vec.size() != 4)
throw std::runtime_error("Vector size must be 4.");
d = vec[0];
x = vec[1];
y = vec[2];
z = vec[3];
};
static VoxelKey InvalidKey() { return VoxelKey(); }
static VoxelKey RootKey() { return VoxelKey(0, 0, 0, 0); }
bool IsValid() const { return d >= 0 && x >= 0 && y >= 0 && z >= 0; }
std::string ToString() const;
void fromString(const std::string& str);
/// @brief 根据方位[0,7]返回对应的八叉树节点键值
VoxelKey Bisect(const uint64_t& direction) const;
std::vector<VoxelKey> GetChildren() const;
/// @brief 当前体素的在层次结构中的父节点
VoxelKey GetParent() const;
/// @brief 当前提取在指定深度的父节点
VoxelKey GetParentAtDepth(int32_t depth) const;
/// @brief 从当前节点到根节点的所有父节点,可选是否包含当前节点自身
std::vector<VoxelKey> GetParents(bool include_self = false) const;
/// @brief 检测当前节点是否为指定体素的子节点
bool ChildOf(VoxelKey parent_key) const;
/// @brief 根据key和las头信息创建包围盒
Box BoxFrom(const VoxelKey& key, const las::LasHeader& header) const;
/*空间查找功能*/
// Definitions taken from https://shapely.readthedocs.io/en/stable/manual.html#binary-predicates
bool Intersects(const las::LasHeader& header, const Box& box) const;
bool Contains(const las::LasHeader& header, const Box& vec) const;
bool Contains(const las::LasHeader& header, const Vector3& point) const;
bool Within(const las::LasHeader& header, const Box& box) const;
bool Crosses(const las::LasHeader& header, const Box& box) const;
double Resolution(const las::LasHeader& header, const CopcInfo& copc_info) const;
static double GetResolutionAtDepth(int32_t d, const las::LasHeader& header, const CopcInfo& copc_info);
int32_t d; ///< 深度
int32_t x; ///< x方向位置
int32_t y; ///< y方向位置
int32_t z; ///< z方向位置
};
/// @class Entry
/// @brief Entry类是Node、Page的基类
/// @note
class Entry
{
public:
static const int ENTRY_SIZE = 32;
Entry() : offset(-1), byte_size(-1), key(VoxelKey::InvalidKey()), point_count(-1) {};
Entry(VoxelKey key, uint64_t offset, int32_t size, int32_t point_count)
: offset(offset), byte_size(size), key(key), point_count(point_count) {};
Entry(const Entry& other)
: offset(other.offset), byte_size(other.byte_size), key(other.key), point_count(other.point_count) {};
virtual bool IsValid() const { return offset >= 0 && byte_size >= 0 && key.IsValid(); }
virtual bool IsPage() const { return IsValid() && point_count == -1; }
std::string ToString() const
{
std::stringstream ss;
ss << "Entry " << key.ToString() << ": off=" << offset << ", size=" << byte_size << ", count=" << point_count
<< ", is_valid=" << IsValid();
return ss.str();
}
friend std::ostream& operator<<(std::ostream& os, Entry const& value)
{
os << value.key.ToString();
os << value.ToString();
return os;
}
void Pack(std::ostream& out_stream)
{
out_stream.write(reinterpret_cast<char*>(&key.d), sizeof(key.d));
out_stream.write(reinterpret_cast<char*>(&key.x), sizeof(key.x));
out_stream.write(reinterpret_cast<char*>(&key.y), sizeof(key.y));
out_stream.write(reinterpret_cast<char*>(&key.z), sizeof(key.z));
out_stream.write(reinterpret_cast<char*>(&offset), sizeof(offset));
out_stream.write(reinterpret_cast<char*>(&byte_size), sizeof(byte_size));
out_stream.write(reinterpret_cast<char*>(&point_count), sizeof(point_count));
}
static Entry Unpack(std::istream& in_stream)
{
VoxelKey key;
in_stream.read(reinterpret_cast<char*>(&key.d), sizeof(key.d));
in_stream.read(reinterpret_cast<char*>(&key.x), sizeof(key.x));
in_stream.read(reinterpret_cast<char*>(&key.y), sizeof(key.y));
in_stream.read(reinterpret_cast<char*>(&key.z), sizeof(key.z));
uint64_t offset;
in_stream.read(reinterpret_cast<char*>(&offset), sizeof(offset));
int32_t size;
in_stream.read(reinterpret_cast<char*>(&size), sizeof(size));
int32_t point_count;
in_stream.read(reinterpret_cast<char*>(&point_count), sizeof(point_count));
return Entry(key, offset, size, point_count);
}
VoxelKey key;
uint64_t offset;
int32_t byte_size;
int32_t point_count;
protected:
bool IsEqual(const Entry& rhs) const
{
return offset == rhs.offset && byte_size == rhs.byte_size && point_count == rhs.point_count && key == rhs.key;
}
};
class Node : public Entry
{
public:
Node(const Entry& e, const VoxelKey& page_key = VoxelKey::InvalidKey()) : Entry(e), page_key(page_key) {};
Node() : Entry() {};
bool operator==(const Node& rhs) { return IsEqual(rhs); }
VoxelKey page_key{};
};
class Page : public Entry
{
public:
Page(Entry e) : Entry(std::move(e)) {};
Page(VoxelKey key, int64_t offset, int32_t byte_size) : Entry(key, offset, byte_size, -1) {};
bool IsValid() const override { return (loaded || (offset >= 0 && byte_size >= 0)) && key.IsValid(); }
bool IsPage() const override { return IsValid() && point_count == -1; }
bool loaded = false;
friend bool operator==(const Page& lhs, const Page& rhs) { return lhs.IsEqual(rhs) && lhs.loaded == rhs.loaded; }
};
二、可视化效果预览
本文简单先介绍COPC格式的组成,有时间对COPC格式文件的构建及解析进行讲解:
先放一个COPC点云可视化效果,实验点云sofi1.88GB,3亿6千多万点,点云LAS头信息如下图:
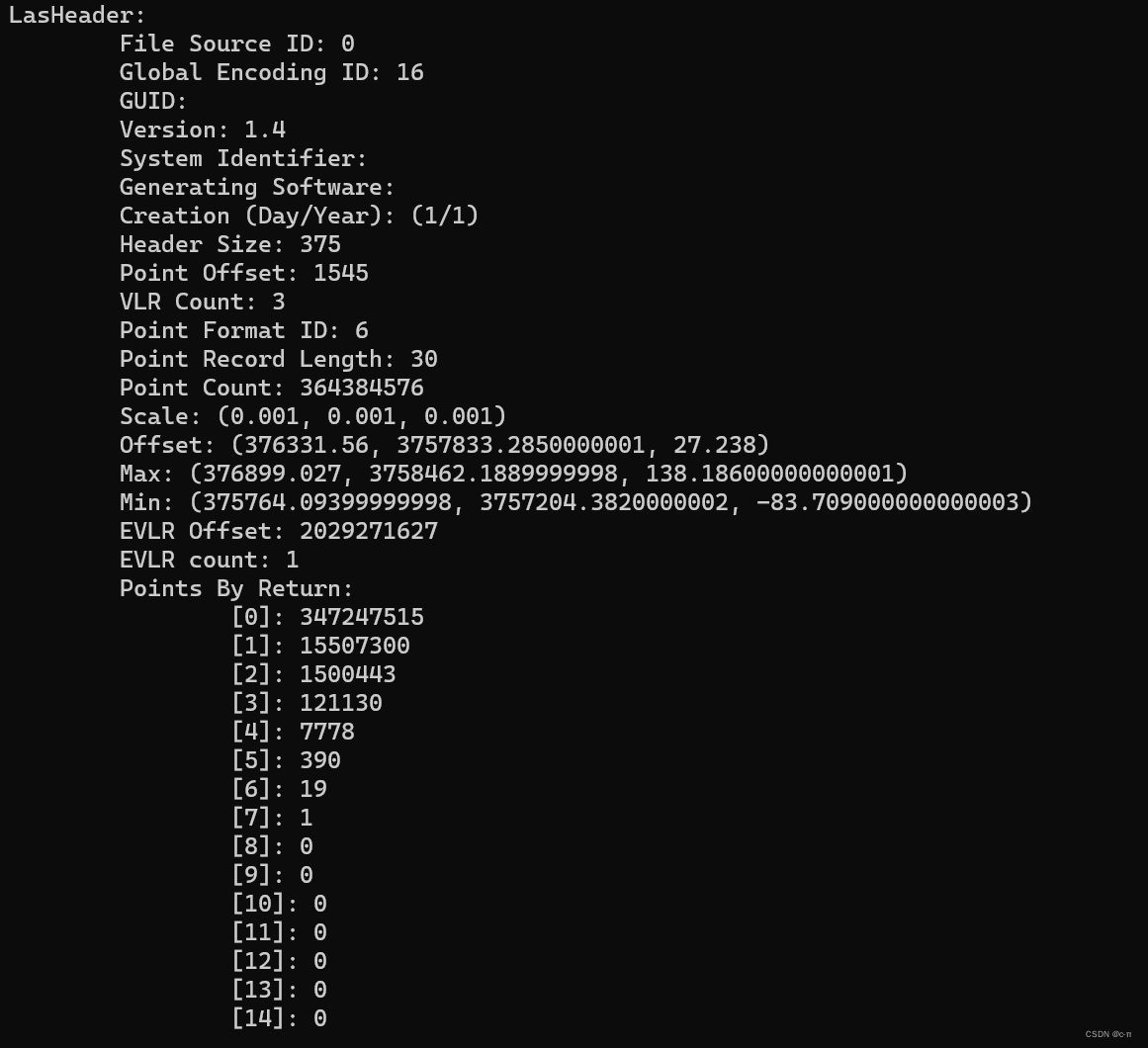
copc格式点云渲染
使用osg三维引擎点云的调度渲染,基本可稳定在100帧左右。














 18万+
18万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









