







目录
pcl_viewer 是 Point Cloud Library (PCL) 提供的一个用于可视化点云数据的工具。
在视图界面操作及效果
| 功能 | 操作 | 效果 |
| 帮助 | 在界面中输入h,可以在控制台看到帮助信息 | 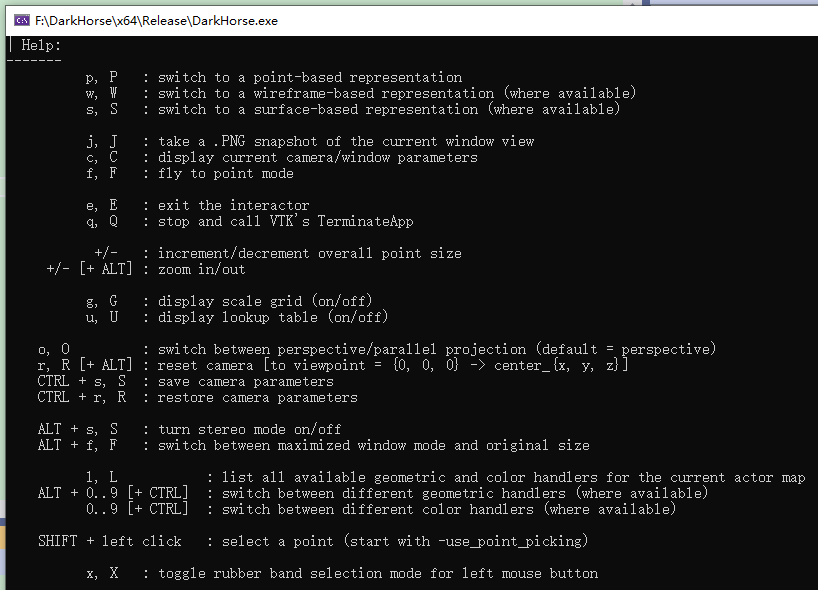 |
| 退出 | 界面中输入q | |
| 放大缩小 | 鼠标滚轮 或 Alt + [+/-] | |
| 平移 | Shift+鼠标拖拽 | |
| 旋转 | Ctrl+鼠标拖拽 | 360度旋转 |
| 保存截图 | j | 保存在.cpp文件所在路径 |
| 显示颜色尺寸 | u | 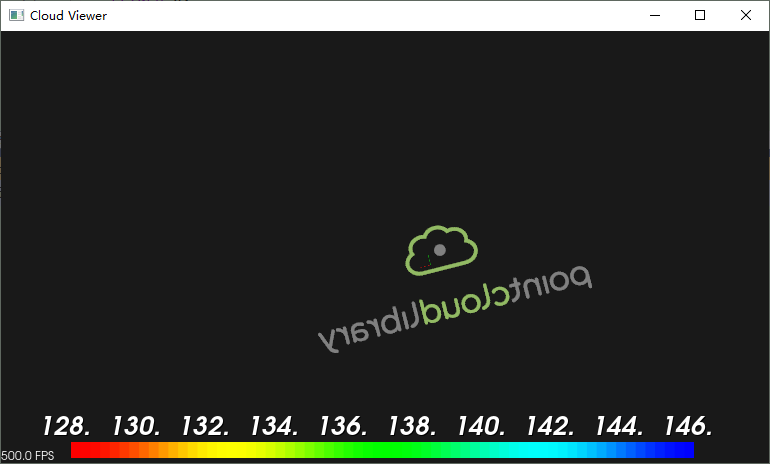 |
| 显示刻度网格 | g | 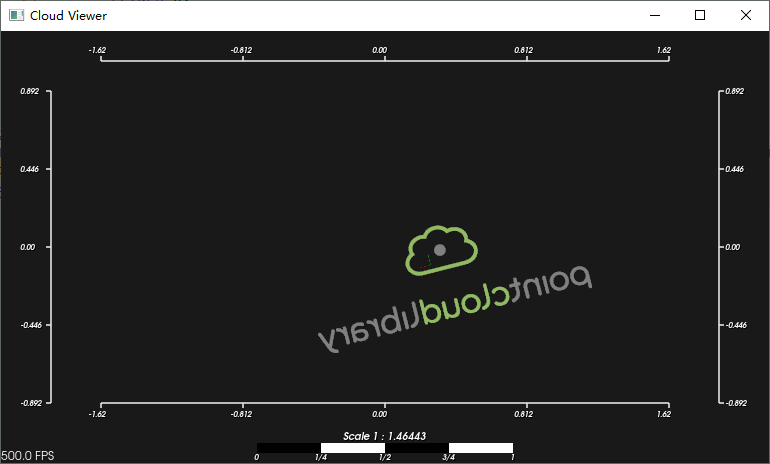 |
| 显示当前摄像机/窗口参数 | c | 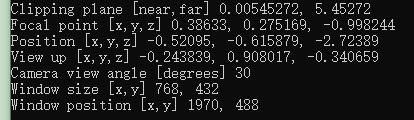 |
| 在透视/平行投影之间切换(默认=透视) | o |
CloudViewer 和 PCLVisualizer 是 PCL 中两个不同的类,都用于创建和管理点云数据的可视化窗口。
CloudViewer 类
CloudViewer 类是一种比较简单的点云可视化器,它提供了基本的点云显示功能。你可以使用 CloudViewer 创建一个点云可视化窗口,并将点云数据显示在窗口中。
例子一:
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
// 包含相关头文件
#include <pcl/visualization/cloud_viewer.h>
typedef pcl::PointXYZ PointT;
int main()
{
// 读取点云
pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>);
pcl::io::loadPCDFile("../input_cloud/rabbit.pcd", *cloud);
pcl::visualization::CloudViewer viewer("simple cloud viewer");
viewer.showCloud(cloud);
while (!viewer.wasStopped())
{
// todo::
}
system("pause");
return 0;
}
例子二:
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
void viewerOneOff(pcl::visualization::PCLVisualizer& viewer) {
// 设置背景色为紫色色
viewer.setBackgroundColor(0.5843, 0.6, 0.8392);
pcl::PointXYZ o;
o.x = 1.0;
o.y = 1.0;
o.z = 0;
// 添加一个圆心为o,半径为0.25m的球体
viewer.addSphere(o, 0.25, "sphere", 0);
viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1.0, 0.0, 0.0, "sphere");
std::cout << "i only run once" << std::endl;
}
int main() {
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>);
pcl::io::loadPCDFile("../data/pcl_logo.pcd", *cloud);
pcl::visualization::CloudViewer viewer("Cloud Viewer");
//这里会一直阻塞直到点云被渲染
viewer.showCloud(cloud);
// 只会调用一次 (非必须)
viewer.runOnVisualizationThreadOnce(viewerOneOff);
while (!viewer.wasStopped()) {
}
return 0;
}#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
void viewerPsycho(pcl::visualization::PCLVisualizer& viewer) {
static unsigned count = 0;
std::stringstream ss;
ss << "Once per viewer loop: " << count++;
// 每次刷新时,移除text,添加新的text
viewer.removeShape("text1", 0);
viewer.addText(ss.str(), 200, 300, "text1", 0);
}
int main() {
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>);
pcl::io::loadPCDFile("../data/pcl_logo.pcd", *cloud);
pcl::visualization::CloudViewer viewer("Cloud Viewer");
//这里会一直阻塞直到点云被渲染
viewer.showCloud(cloud);
// 每次可视化迭代都会调用一次(频繁调用) (非必须)
//viewer.runOnVisualizationThread(viewerPsycho);
while (!viewer.wasStopped()) {
}
return 0;
}效果图如下:
| viewer.runOnVisualizationThreadOnce(viewerOneOff); | viewer.runOnVisualizationThread(viewerPsycho); |
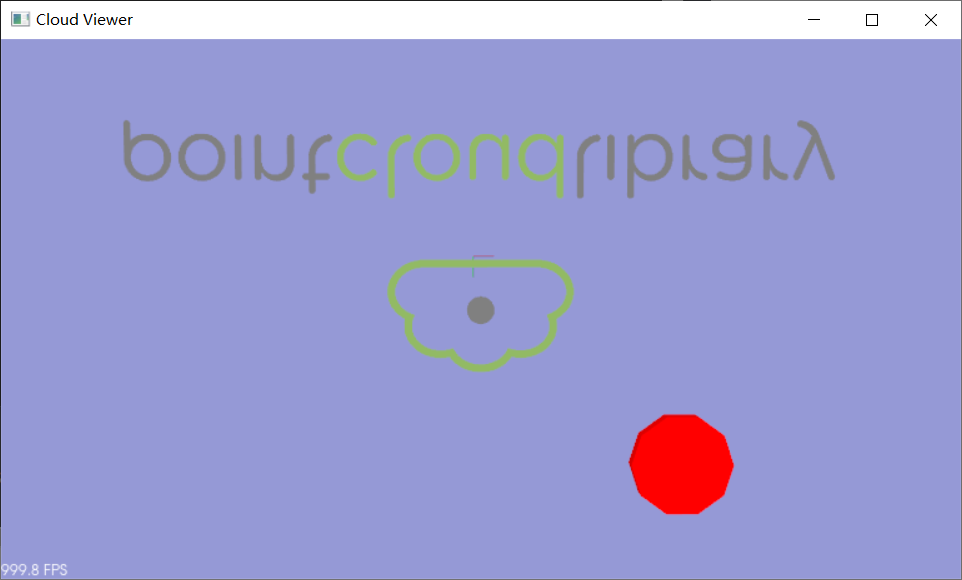 | 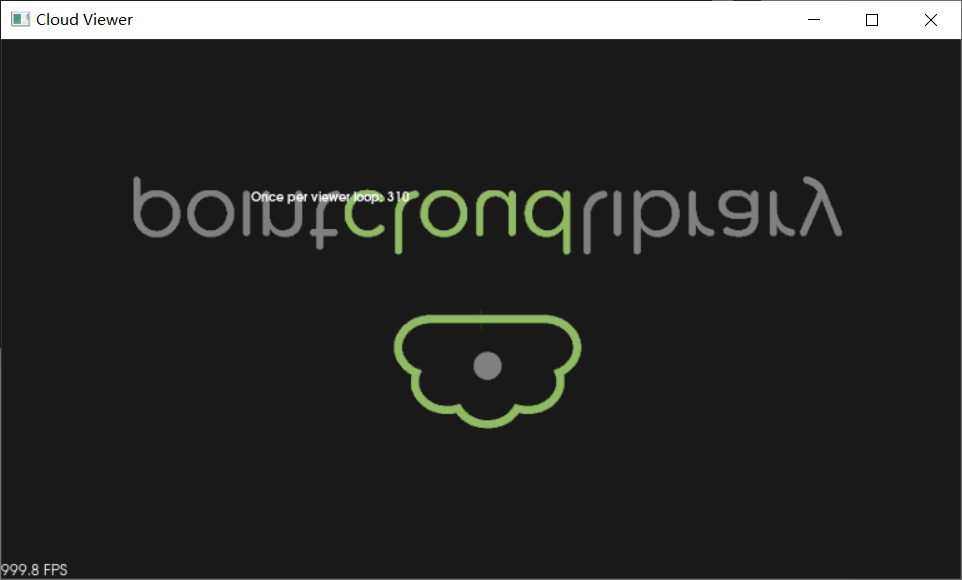 |
PCLVisualizer 类
PCLVisualizer 类是一个更为强大和灵活的点云可视化器,具有更多的可定制性和扩展性。你可以使用 PCLVisualizer 创建一个可视化窗口,并通过其提供的方法添加、删除和修改点云、文本、几何图形等对象,以及设置视角、光照和渲染属性等。
基础显示功能
例子一:
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
int main(int argc, char** argv) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("../data/bunny.pcd", *cloud);
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_milk(new pcl::PointCloud<pcl::PointXYZRGB>);
pcl::io::loadPCDFile("../data/milk_color.pcd", *cloud_milk);
// 创建PCLVisualizer
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
// 设置背景色为浅黄色(非必须)
viewer->setBackgroundColor(0.9647, 0.9412, 0.8392, 0);
// 添加一个普通点云的颜色处理器 (可以设置指定颜色,也可以去掉single_color参数不设置)
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, 192, 127, 220);
viewer->addPointCloud<pcl::PointXYZ>(cloud, single_color, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "sample cloud");
// 再添加一个彩色点云及配置
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud_milk);
viewer->addPointCloud<pcl::PointXYZRGB>(cloud_milk, rgb, "sample cloud milk");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud milk");
// 添加一个0.5倍缩放的坐标系(非必须)
viewer->addCoordinateSystem(0.5);
// 直到窗口关闭才结束循环
while (!viewer->wasStopped()) {
// 每次循环调用内部的重绘函数
viewer->spinOnce();
}
return 0;
} 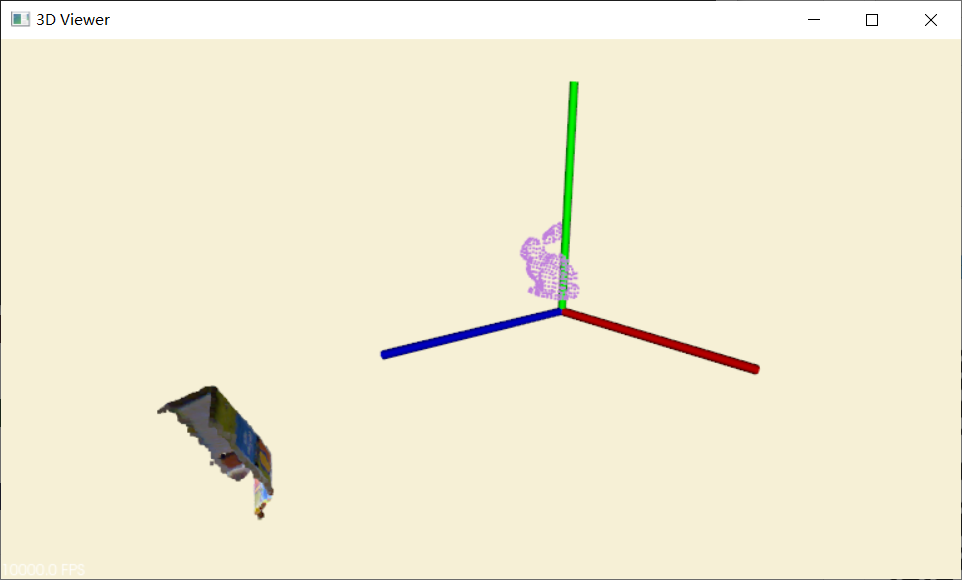
ps:setBackgroundColor()参数范围0.0~1.0;PointCloudColorHandlerCustom()参数范围0~255.
例子二:显示点云、网格、设置颜色、连线
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>
// 包含相关头文件
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/date_time/posix_time/posix_time.hpp>
#include <boost/thread/thread.hpp>
typedef pcl::PointXYZ PointT;
int main()
{
// 读取点云
pcl::PointCloud<PointT>::Ptr cloud1(new pcl::PointCloud<PointT>);
pcl::io::loadPCDFile("../input_cloud/DKdata.pcd", *cloud1);
pcl::PointCloud<PointT>::Ptr cloud2(new pcl::PointCloud<PointT>);
pcl::io::loadPCDFile("../input_cloud/rabbit.pcd", *cloud2);
// 定义对象
pcl::visualization::PCLVisualizer viewer;
//设置背景颜色,默认黑色
viewer.setBackgroundColor(100, 100, 100); // rgb
// --- 显示点云数据 ----
// "cloud1" 为显示id,默认cloud,显示多个点云时用默认会报警告。
pcl::visualization::PointCloudColorHandlerCustom<PointT> green(cloud1, 0, 255, 0);
viewer.addPointCloud(cloud1, green,"cloud1");
pcl::visualization::PointCloudColorHandlerCustom<PointT> red(cloud2, 0, 0, 255); // rgb
// 将点云设置颜色,默认白色
viewer.addPointCloud(cloud2, red, "cloud2");
// 将两个点连线
PointT temp1 = cloud1->points[0];
PointT temp2 = cloud1->points[100];
//viewer.addLine(temp1, temp2, "line0");
// 同样可以设置线的颜色,
viewer.addLine(temp1, temp2, 255, 0, 0, "line0");
// 开始显示2种方法,任选其一
// 2. 非阻塞式
while (!viewer.wasStopped())
{
viewer.spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
// 可添加其他操作
}
// 1. 阻塞式
//viewer.spin();
system("pause");
return 0;
}
按键事件
激活点云显示窗口,键盘按下a,删除点云,再按a,显示点云
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
// 回掉函数所用数据结构
struct callback_args {
bool* isShow;
pcl::PointCloud<pcl::PointXYZ>::Ptr orgin_points;
pcl::visualization::PCLVisualizer::Ptr viewerPtr;
};
// 按键事件回掉函数
void kb_callback(const pcl::visualization::KeyboardEvent& event, void* args)
{
if (event.keyDown() && event.getKeyCode() == 'a')
{
std::cout << "a has pressed" << std::endl;
struct callback_args* data = (struct callback_args*)args;
if (*(data->isShow))
{
data->viewerPtr->removePointCloud("cloud");
*(data->isShow) = false;
std::cout << "remove point cloud" << std::endl;
}
else {
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> IndianRed2(data->orgin_points, 238, 217 , 85);
data->viewerPtr->addPointCloud(data->orgin_points, IndianRed2, "cloud");
*(data->isShow) = true;
std::cout << "add point cloud" << std::endl;
}
}
}
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("../input_cloud/DKdata2.pcd", *cloud);
pcl::console::print_highlight("load cloud !\n");
// 定义对象
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> IndianRed2(cloud, 238, 99, 99);
viewer->addPointCloud(cloud, IndianRed2, "cloud");
// 初始化参数
bool isShow = true;
struct callback_args kb_args;
kb_args.isShow = &isShow;
kb_args.orgin_points = cloud;
kb_args.viewerPtr = viewer;
// 设置回调函数
viewer->registerKeyboardCallback(kb_callback, (void*)&kb_args);
viewer->spin();
return 0;
}
点选取事件
按住Shift键同时按下鼠标左键,点击可视化窗口;想退出时激活控制台窗口,键盘输入Q
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
struct callback_args {
// structure used to pass arguments to the callback function
int a; //为了对齐
pcl::PointCloud<pcl::PointXYZ>::Ptr clicked_points_3d;
pcl::visualization::PCLVisualizer::Ptr viewerPtr;
};
void pp_callback(const pcl::visualization::PointPickingEvent& event, void* args)
{
struct callback_args* data = (struct callback_args*)args;
if (event.getPointIndex() == -1)
return;
int index = event.getPointIndex();
std::cout << "index: " << index << std::endl;
pcl::PointXYZ current_point;
event.getPoint(current_point.x, current_point.y, current_point.z);
// 检查容器内存空间是否足够,如果需要则扩充
if (data->clicked_points_3d->size() >= data->clicked_points_3d->points.capacity())
{
data->clicked_points_3d->reserve(data->clicked_points_3d->size() + 100);
}
data->clicked_points_3d->points.push_back(current_point);
// Draw clicked points in red:
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> purple(data->clicked_points_3d, 186, 180, 246);
data->viewerPtr->removePointCloud("clicked_points");
data->viewerPtr->addPointCloud(data->clicked_points_3d, purple, "clicked_points");
data->viewerPtr->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 10, "clicked_points");
std::cout << current_point.x << " " << current_point.y << " " << current_point.z << std::endl;
}
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("../input_cloud/rabbit.pcd", *cloud);
pcl::console::print_highlight("load cloud !\n");
//pcl::visualization::PCLVisualizer viewer;
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> orange(cloud, 252, 196, 143);
viewer->addPointCloud(cloud, orange, "cloud");
// Add point picking callback to viewer:
pcl::PointCloud<pcl::PointXYZ>::Ptr clicked_points_3d(new pcl::PointCloud<pcl::PointXYZ>);
struct callback_args cb_args;
cb_args.clicked_points_3d = cloud;
cb_args.viewerPtr = viewer;
viewer->registerPointPickingCallback(pp_callback, (void*)&cb_args);
pcl::console::print_highlight("Shift+click on three floor points, then press 'Q'...\n");
// Spin until 'Q' is pressed:
viewer->spin();
system("pause");
return 0;
}
区域选取事件
/*在视图窗口页面按下x键,鼠标左键按钮拖动选择,按下q键关闭视图窗口;在控制台窗口按任意键即可关闭视图窗口*/
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
struct callback_args {
// structure used to pass arguments to the callback function
pcl::PointCloud<pcl::PointXYZ>::Ptr orgin_points;
pcl::PointCloud<pcl::PointXYZ>::Ptr chosed_points_3d;
pcl::visualization::PCLVisualizer::Ptr viewerPtr;
};
void ap_callback(const pcl::visualization::AreaPickingEvent& event, void* args)
{
struct callback_args* data = (struct callback_args*)args;
std::vector<int> indiecs;
if (!event.getPointsIndices(indiecs))
return;
for (int i = 0; i < indiecs.size(); ++i)
{
data->chosed_points_3d->push_back(data->orgin_points->points[indiecs[i]]);
}
// Draw clicked points in red:
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> red(data->chosed_points_3d, 255, 0, 0);
data->viewerPtr->removePointCloud("chosed_points");
data->viewerPtr->addPointCloud(data->chosed_points_3d, red, "chosed_points");
data->viewerPtr->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "chosed_points");
std::cout << "selected " << indiecs.size() << " points , now sum is " << data->chosed_points_3d->size() << std::endl;
}
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("../input_cloud/rabbit.pcd", *cloud);
pcl::console::print_highlight("load cloud !\n");
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> green(cloud, 0, 255, 0);
viewer->addPointCloud(cloud, green, "cloud");
// Add point picking callback to viewer:
struct callback_args cb_args;
cb_args.orgin_points = cloud;
pcl::PointCloud<pcl::PointXYZ>::Ptr chosed_points_3d(new pcl::PointCloud<pcl::PointXYZ>);
cb_args.chosed_points_3d = chosed_points_3d;
cb_args.viewerPtr = viewer;
viewer->registerAreaPickingCallback(ap_callback, (void*)&cb_args);
pcl::console::print_highlight("press x enter slected model, then press 'qQ'...\n");
//viewer->spin(); //使用这句代码,选取区域后不会有实时更新的效果
while (!viewer->wasStopped())
{
viewer->spinOnce(100); // 等待 100 毫秒后更新可视化窗口
}
system("pause");
return 0;
} 
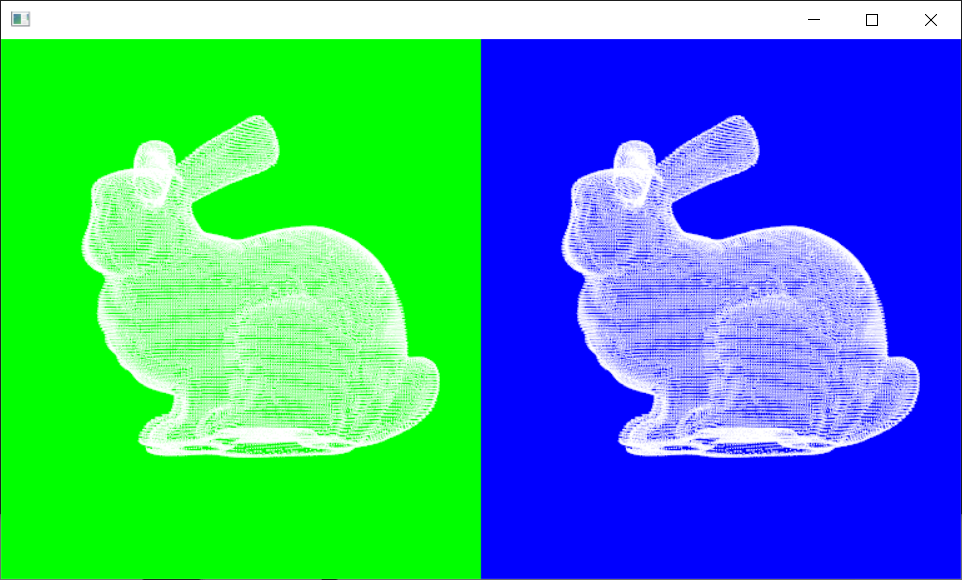
显示区域分割
pcl可以将显示区域分割,从(xmin,ymin)到(xmax,ymax)一个矩形区域,范围是(0,1)。左下角(0,0),右上角(1,1)
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
// 包含相关头文件
#include <pcl/visualization/pcl_visualizer.h>
typedef pcl::PointXYZ PointT;
int main()
{
// 读取点云
pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>);
pcl::io::loadPCDFile("../input_cloud/rabbit.pcd", *cloud);
// 定义对象
pcl::visualization::PCLVisualizer viewer;
int v1(1); // viewport
viewer.createViewPort(0.0, 0.0, 0.5, 1.0, v1);
viewer.setBackgroundColor(0,255,0, v1);
viewer.addPointCloud(cloud, "cloud1", v1);;
int v2(2);// viewport
viewer.createViewPort(0.5, 0.0, 1.0, 1.0, v1);
viewer.setBackgroundColor(0, 0, 255, v2);
viewer.addPointCloud(cloud, "cloud2", v2);;
viewer.spin();
system("pause");
return 0;
}
ps:背景颜色换成其他的就不能看到点云了,真不知道为什么
pcl_viewer工具使用
pointCloudLibrary点云库在windows下使用pcl_viewer工具
(1)首先在点云库安装目录下找到pcl_viewer.exe,具体根据自己的安装目录确定
(2)使用cmd命令行打开
cd 到pcl_viewer.exe 路径,敲入命令:
pcl_viewer.exe F:\DarkHorse\data\ism_train.pcd |
 |
(3) pcl_viewer命令行参数说明
a. 使用 -bc -fc 改变pcl_viewer前景色,背景色
pcl_viewer.exe F:\DarkHorse\data\lamppost.pcd -bc 172,226,218 -fc 255,0,255 |
 |
b 加入前景色(-fc)、背景色(-bc)、不透明度(-opaque)、坐标轴(-ax),坐标轴沿X轴平移20(-ax_pos 20,0,0)
pcl_viewer.exe F:\DarkHorse\data\lamppost.pcd -bc 212,224,218 -fc 255,0,255 -ax 3 -opaque 0.8 -ax_pos -20,0,0 |
 |















 1819
1819











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









