







Win32和c++11多线程
一、概念
进程要想执行任务,必须得有线程,线程是进程的基本执行单元,一个进程的所有任务都在线程中执行。
1.线程的特点
线程内核对象

线程控制块
线程是独立调度和分派的基本单位
共享进程的资源
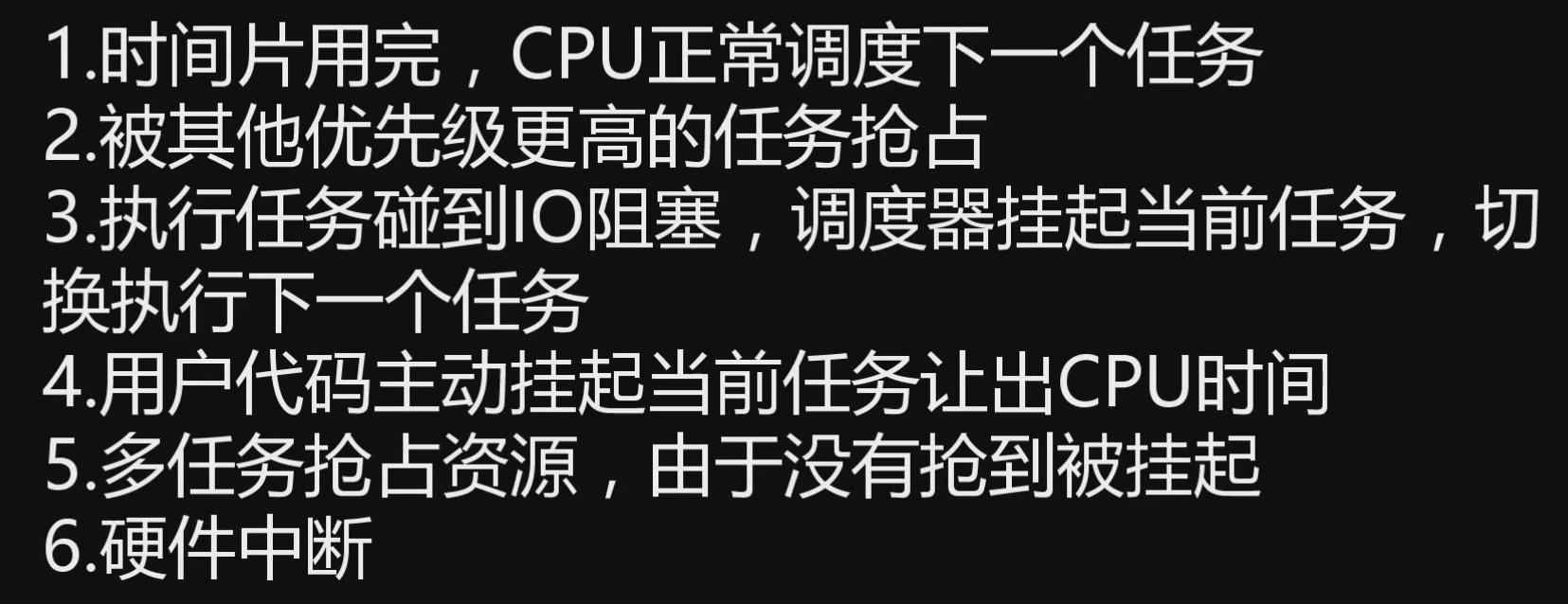
2.线程的上下文切换
引起上下文切换的原因
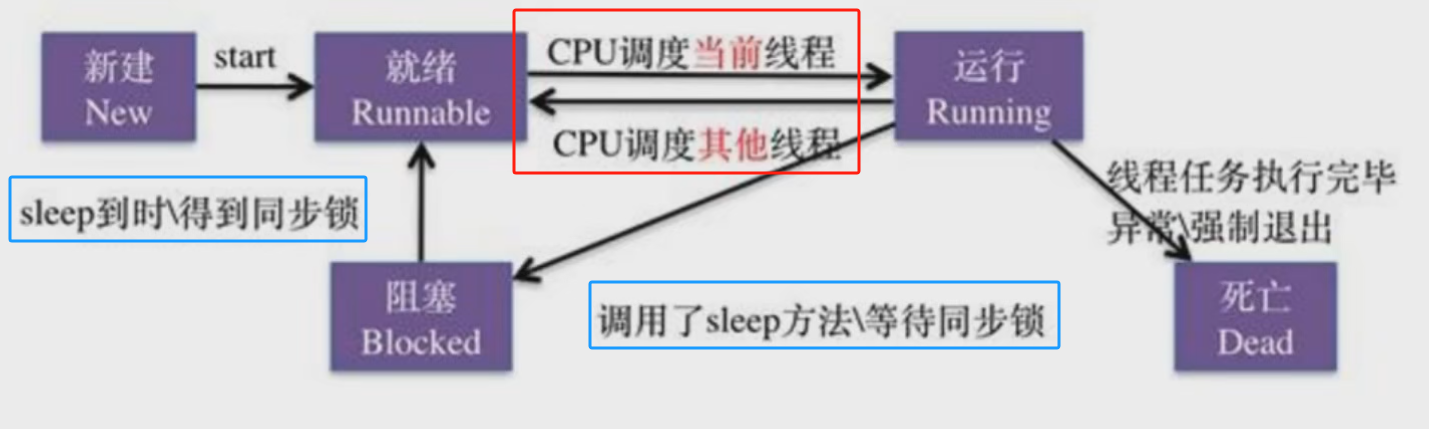
3.线程的状态
二、Windows多线程API
头文件#include<Windows.h>
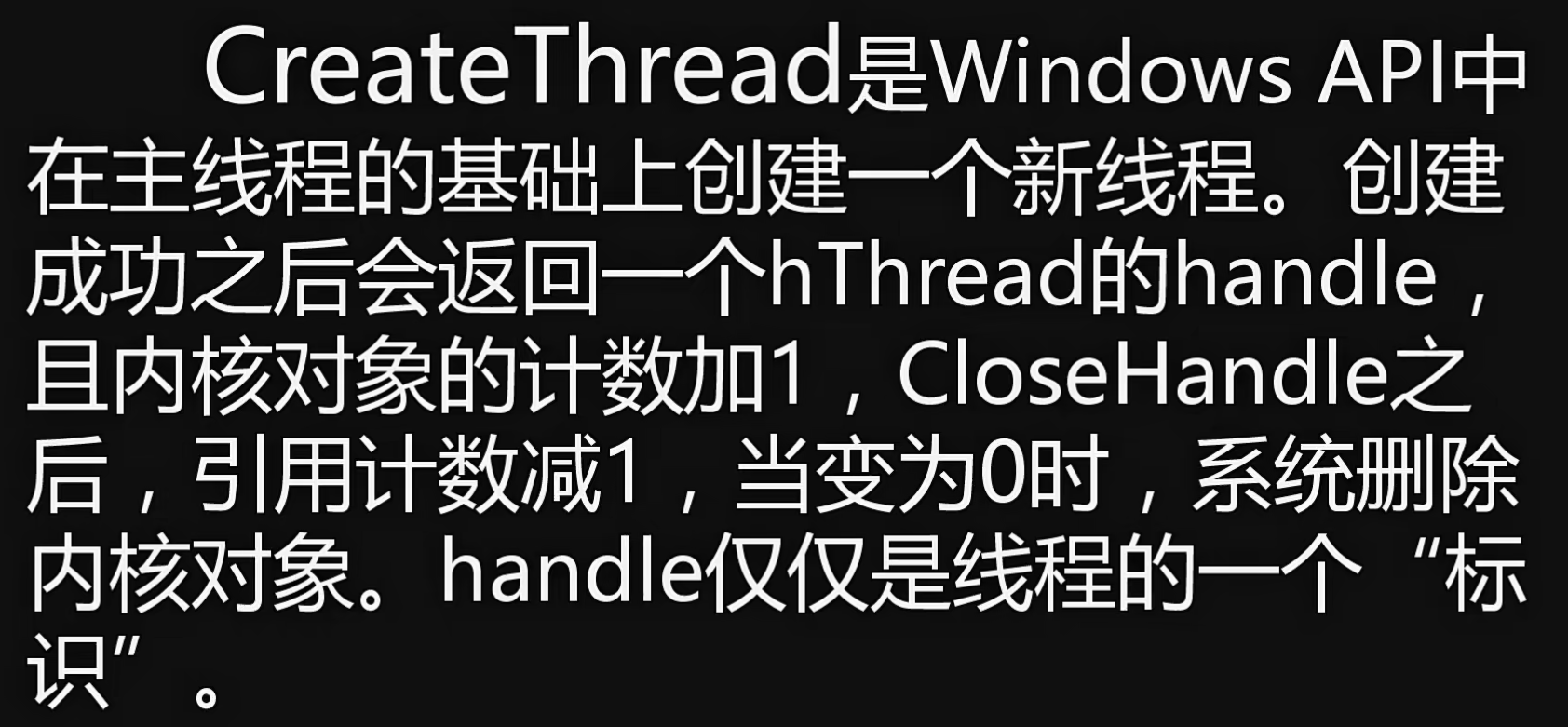
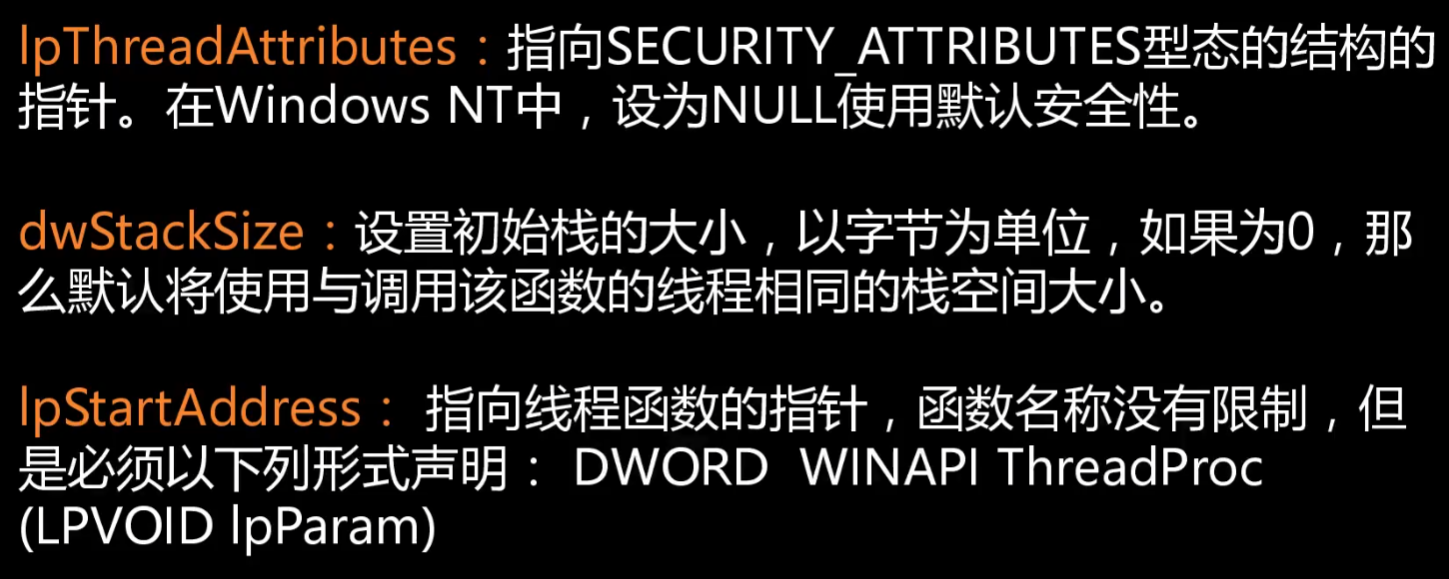
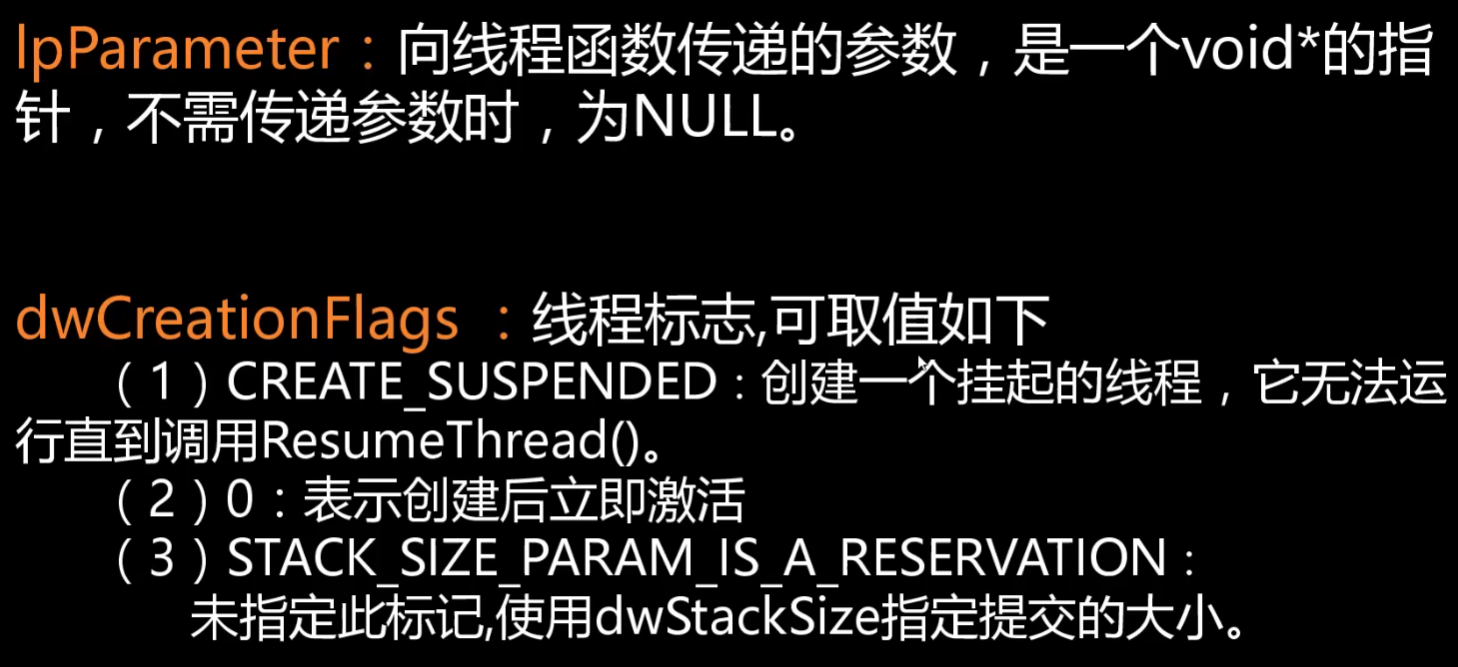
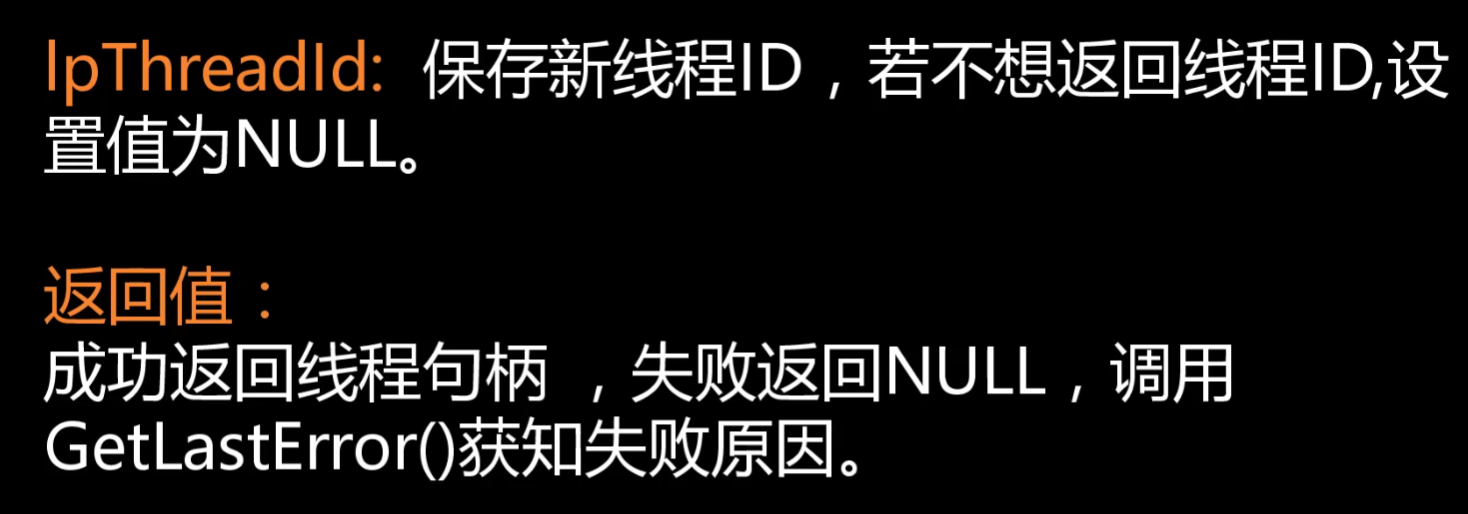
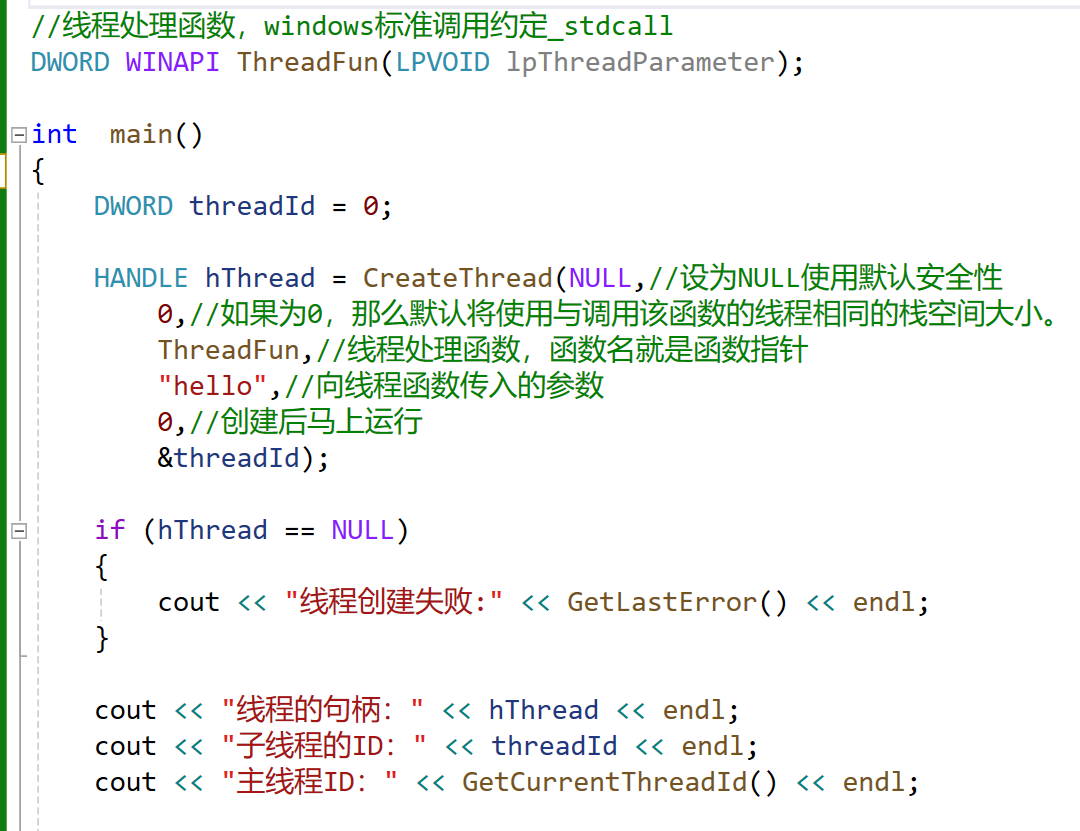
1.CreateThread创建线程
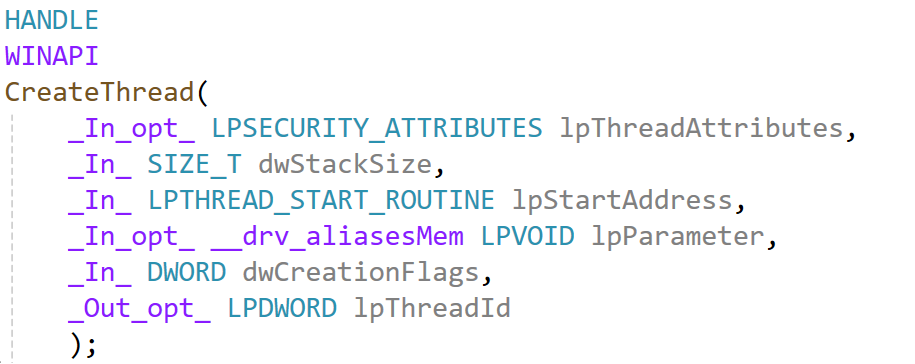
参数说明:
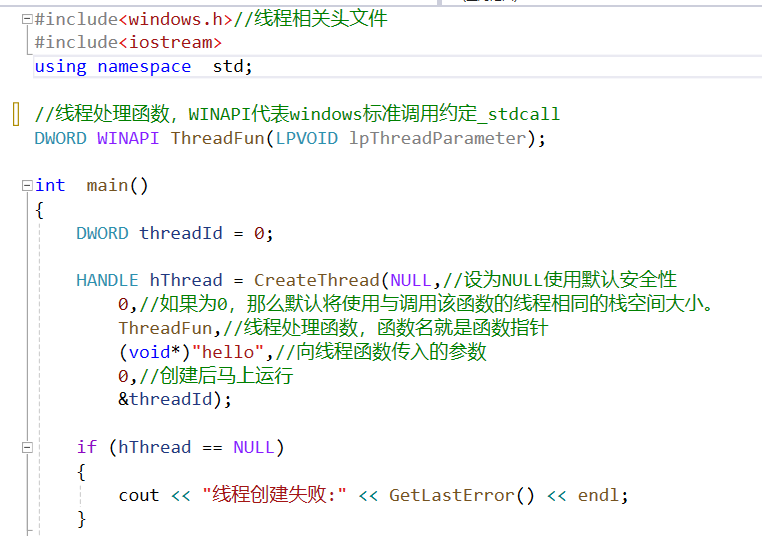
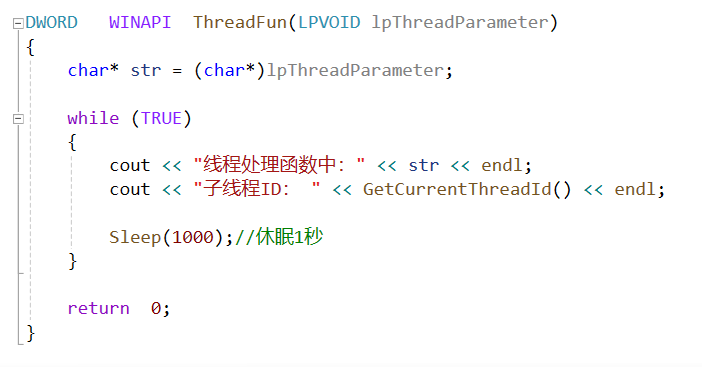

线程的句柄是一块地址,线程ID可以用GetCurrentThreadId()函数获得。
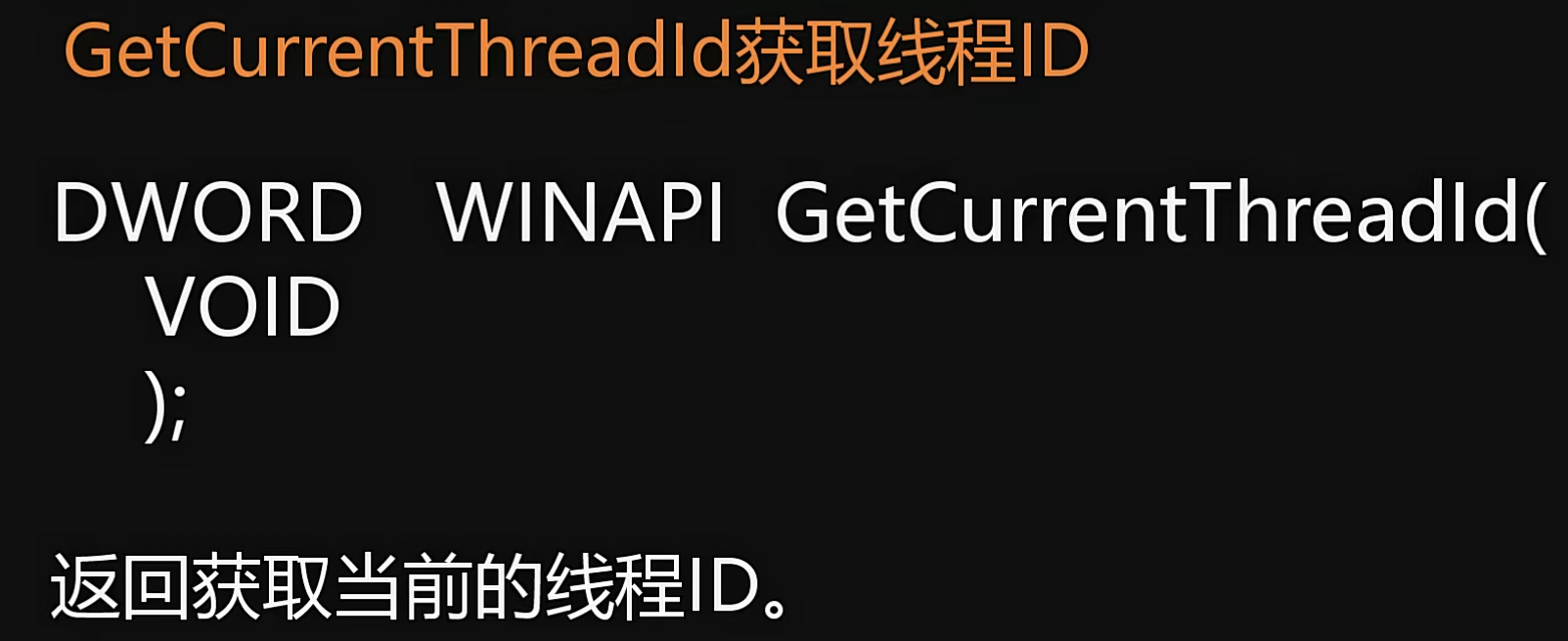
2.获取线程ID
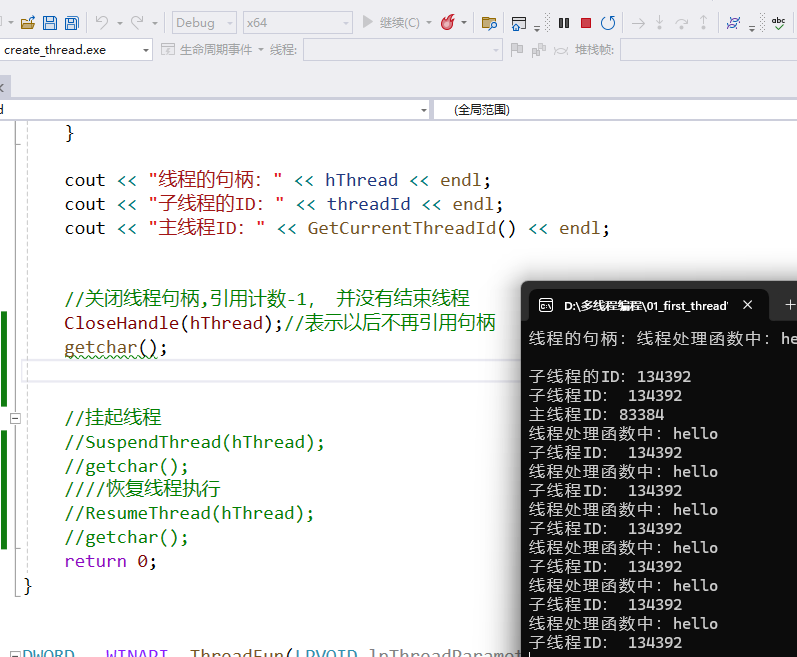
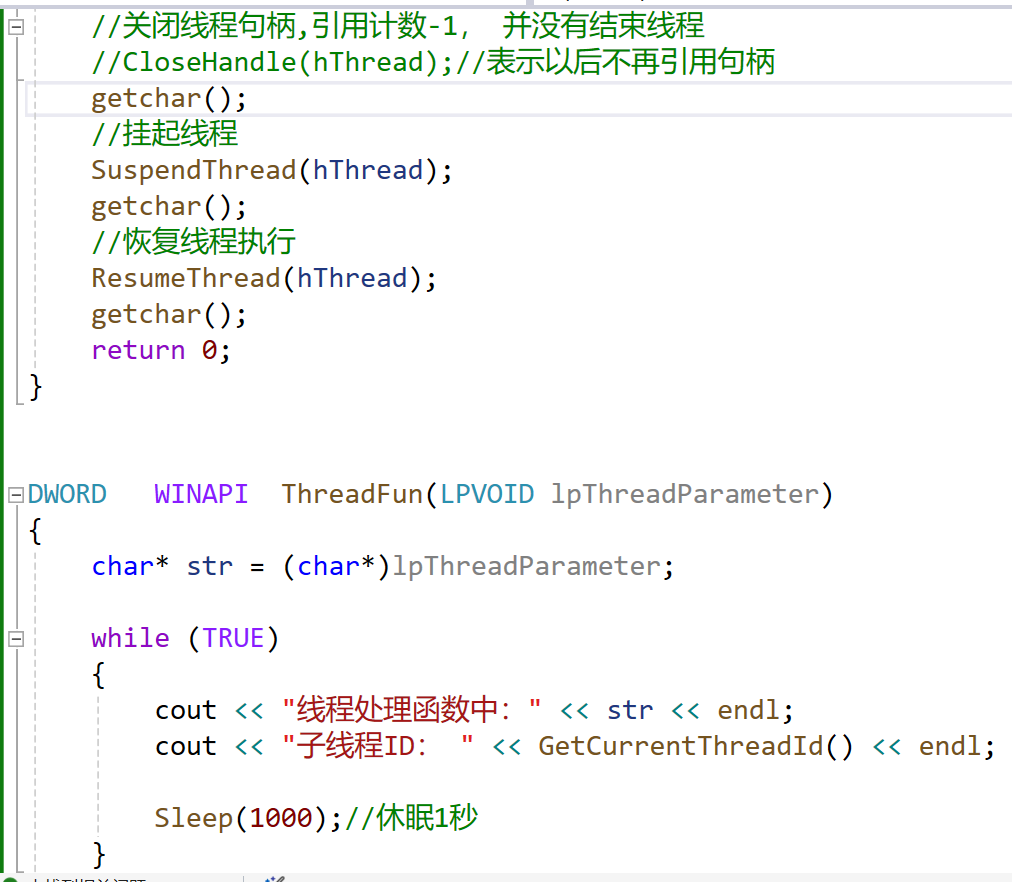
3.关闭线程句柄
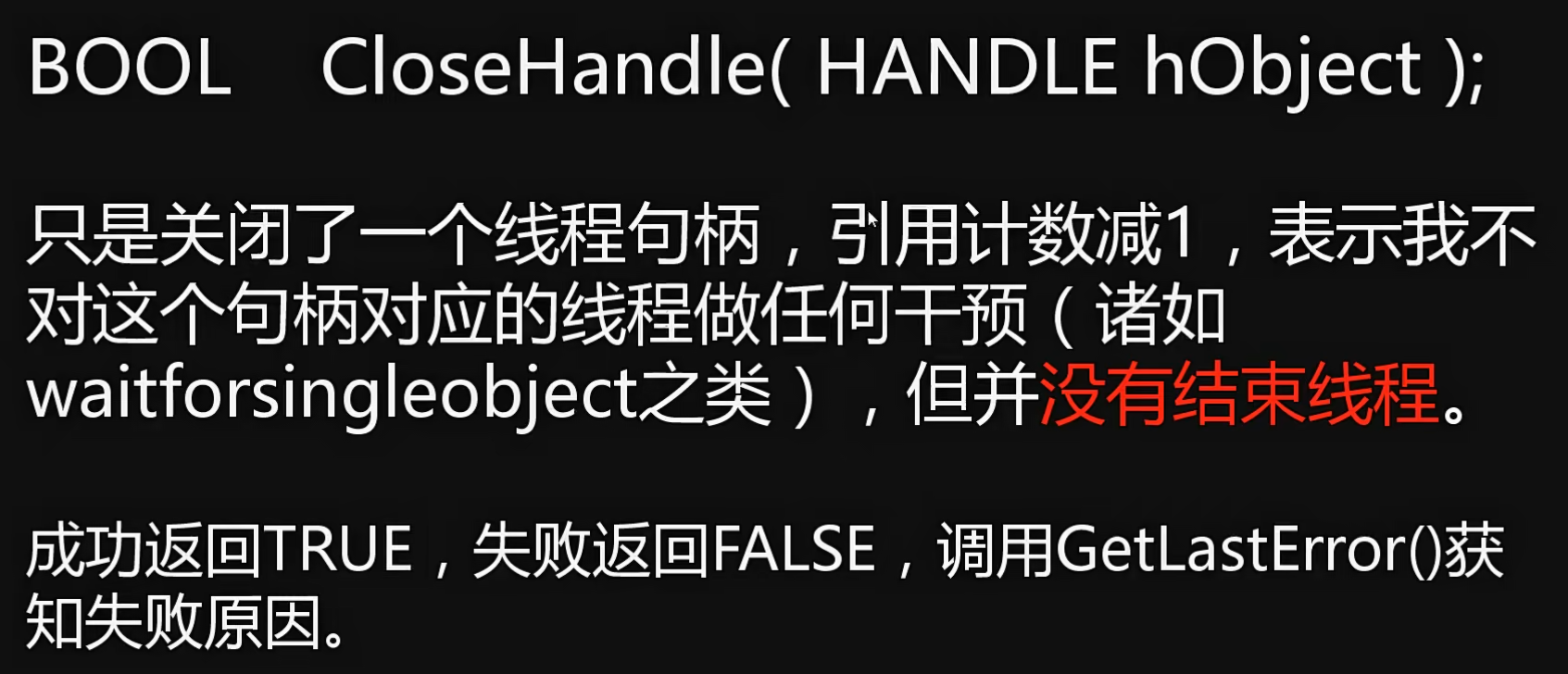
关闭句柄后线程还会继续执行。
4.挂起线程
5.恢复线程
6.休眠线程的执行
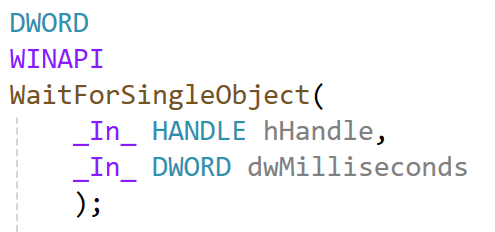
7.WaitForSingleObject
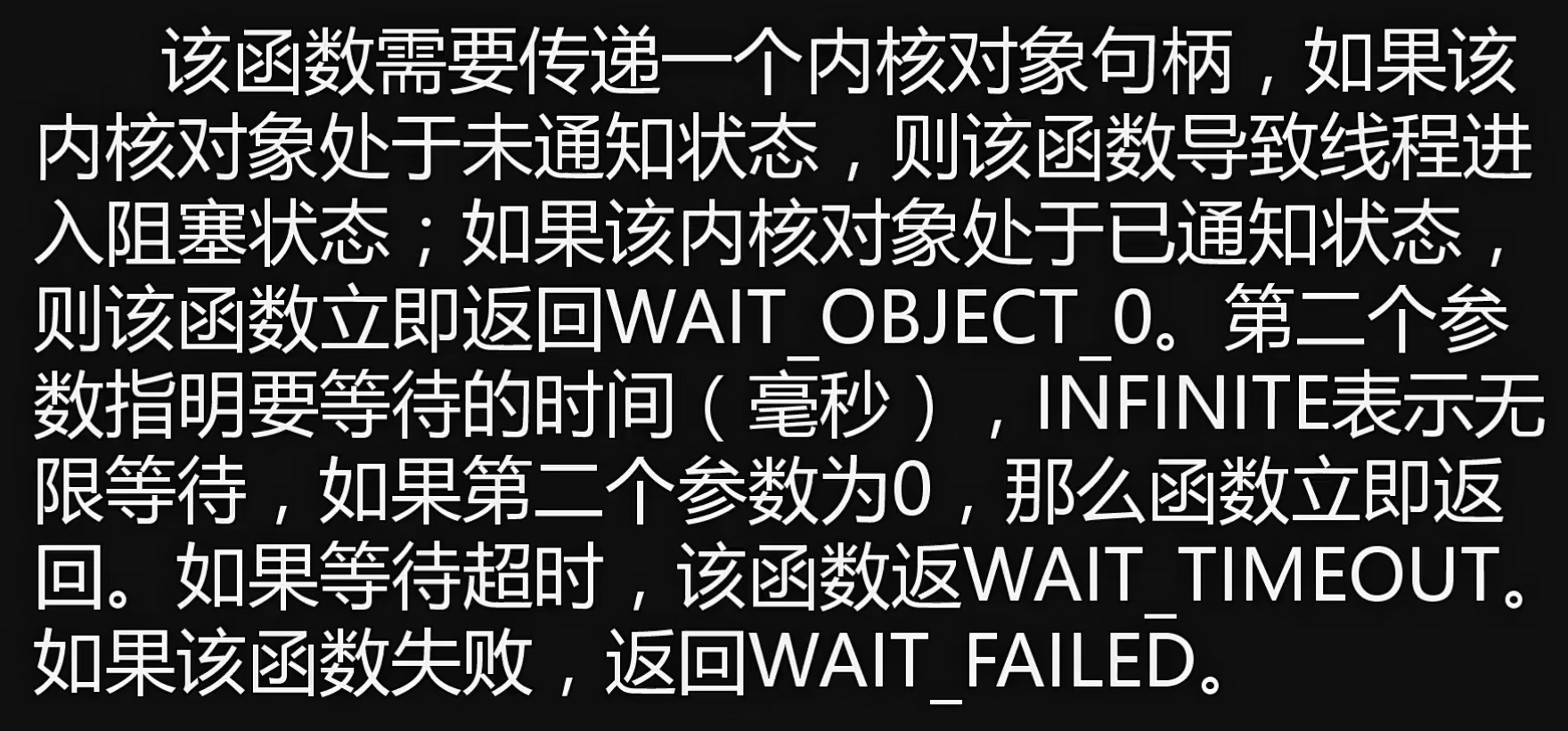
等待一个内核对象变为已通知状态。这个函数常用于线程同步,确保一个线程在继续执行之前等待某个事件(如线程结束、互斥体释放、信号量达到等)。
未通知状态:该句柄关联的线程未结束,仍在执行。
已通知状态:该句柄关联的线程执行结束。
参数:
hHandle:等待的对象的句柄。这个句柄可以是各种同步对象,如事件、互斥体、信号量、进程或线程。dwMilliseconds:超时时间,以毫秒为单位。如果设置为INFINITE,表示无限等待,直到对象进入信号状态。
返回值:
WaitForSingleObject 返回一个 DWORD 值,表示函数的结果。常见的返回值包括:
WAIT_OBJECT_0:指定的对象已进入信号状态。WAIT_TIMEOUT:等待超时,指定的对象在超时时间内未进入信号状态。WAIT_FAILED:函数调用失败。可以通过调用GetLastError函数获取扩展错误信息。
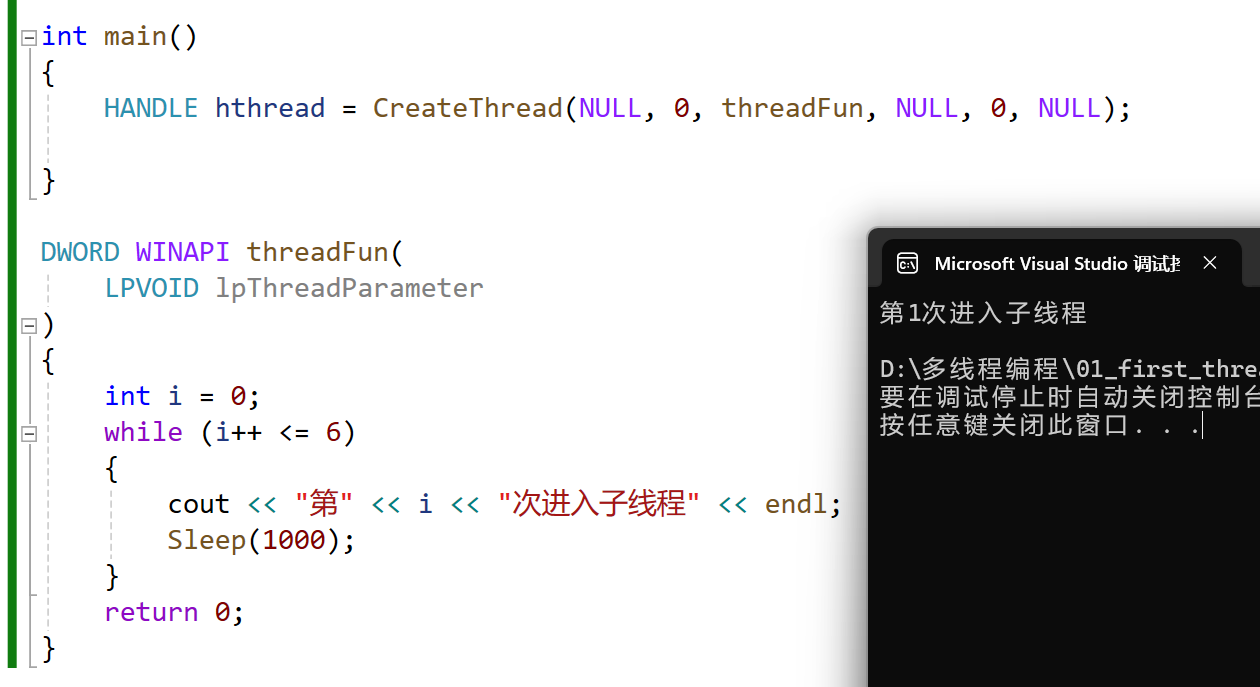

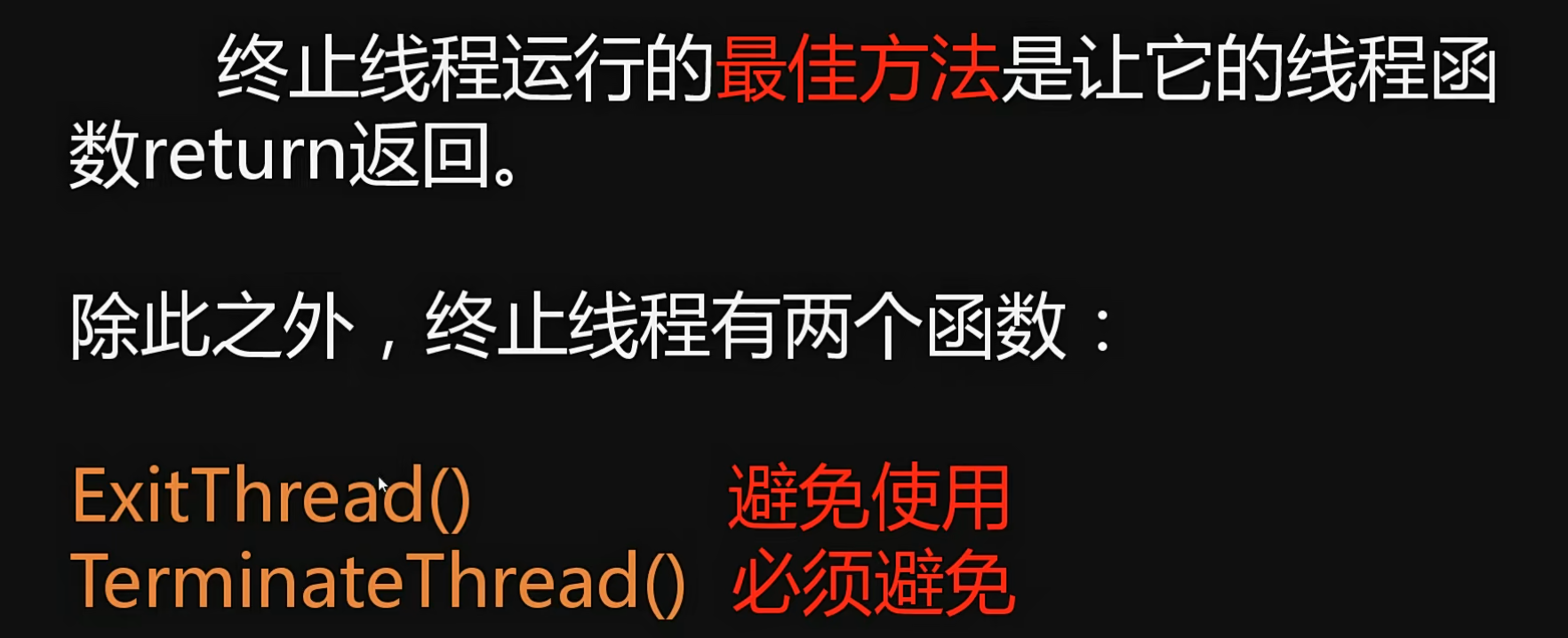
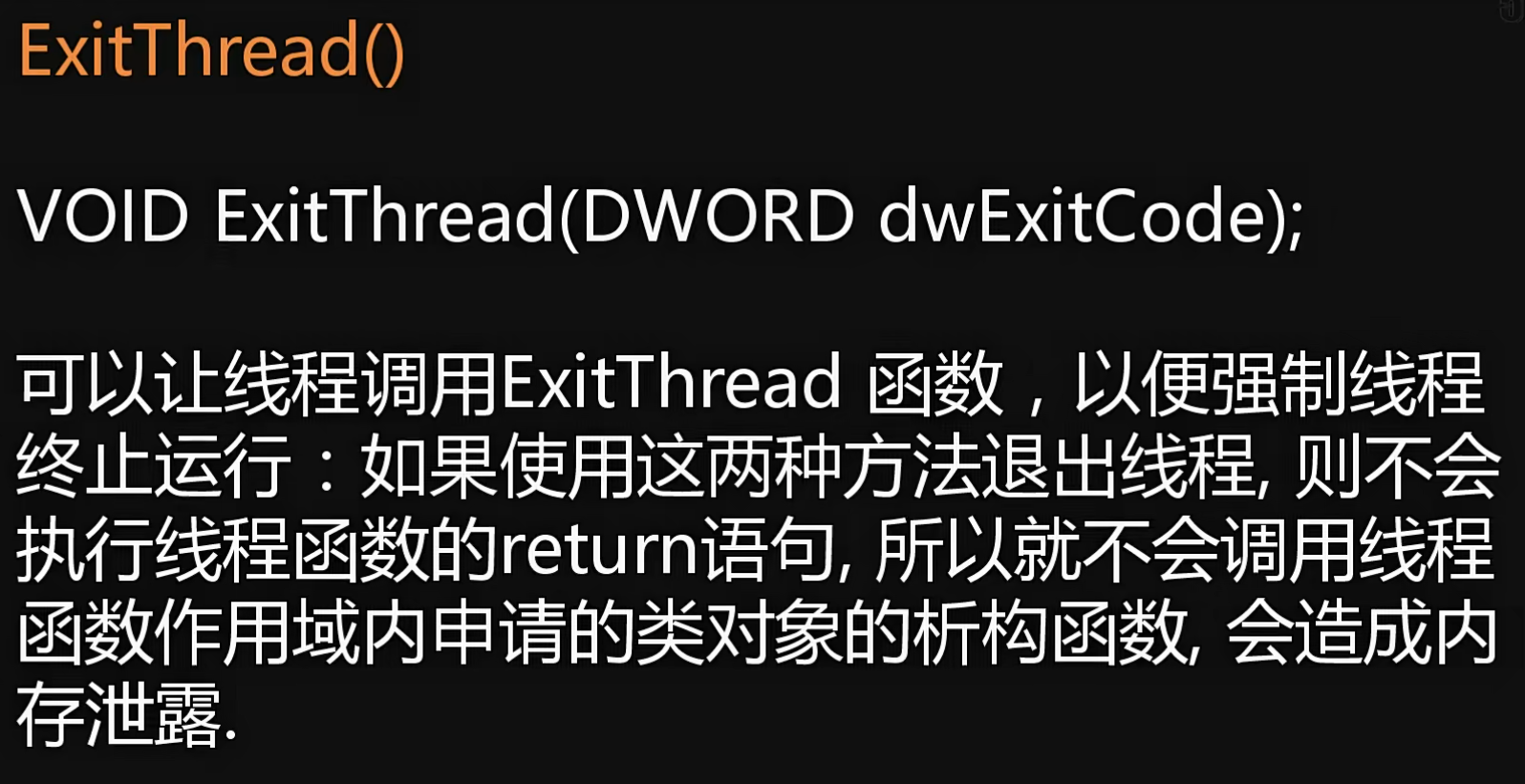
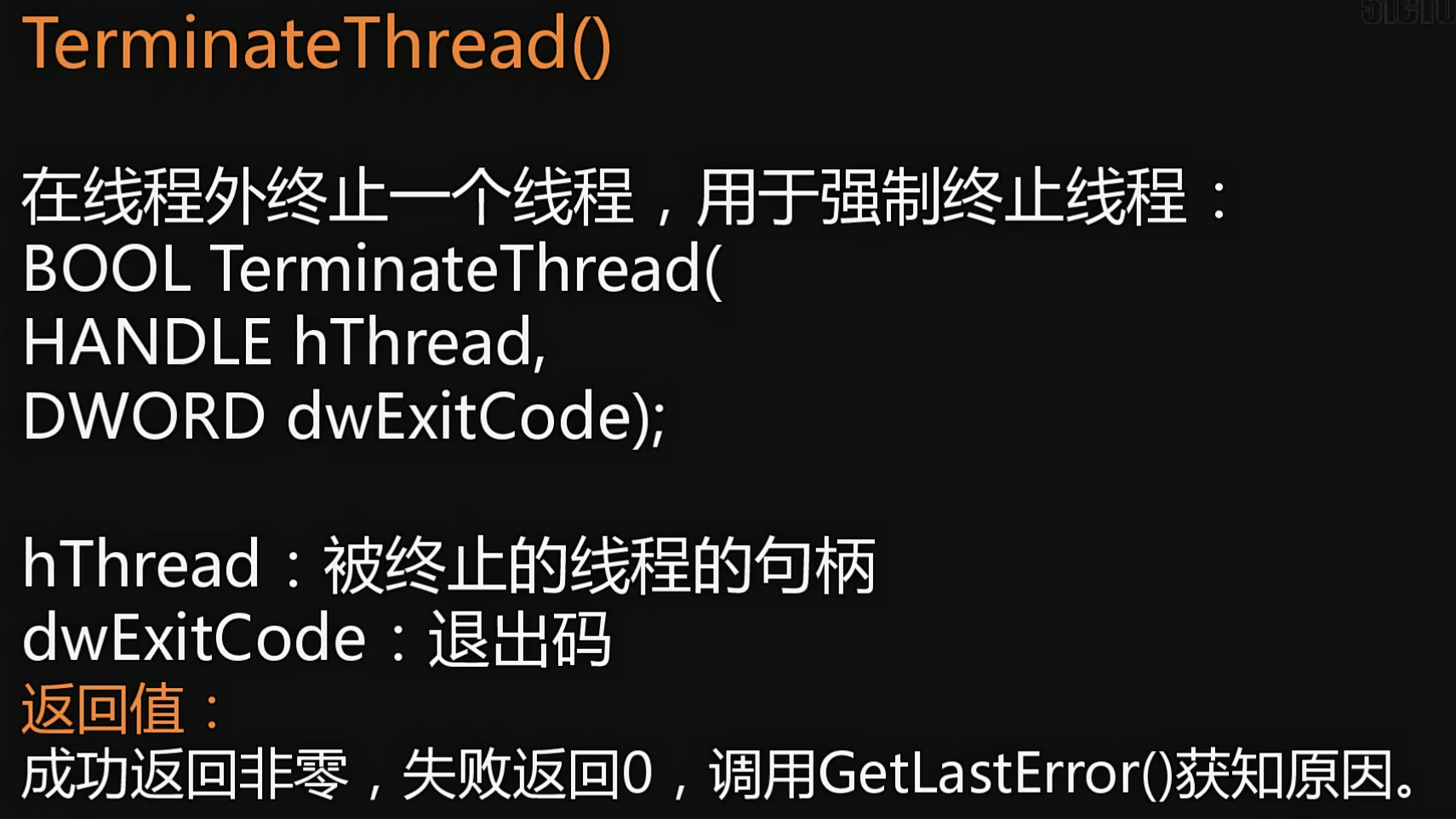
8.终止线程
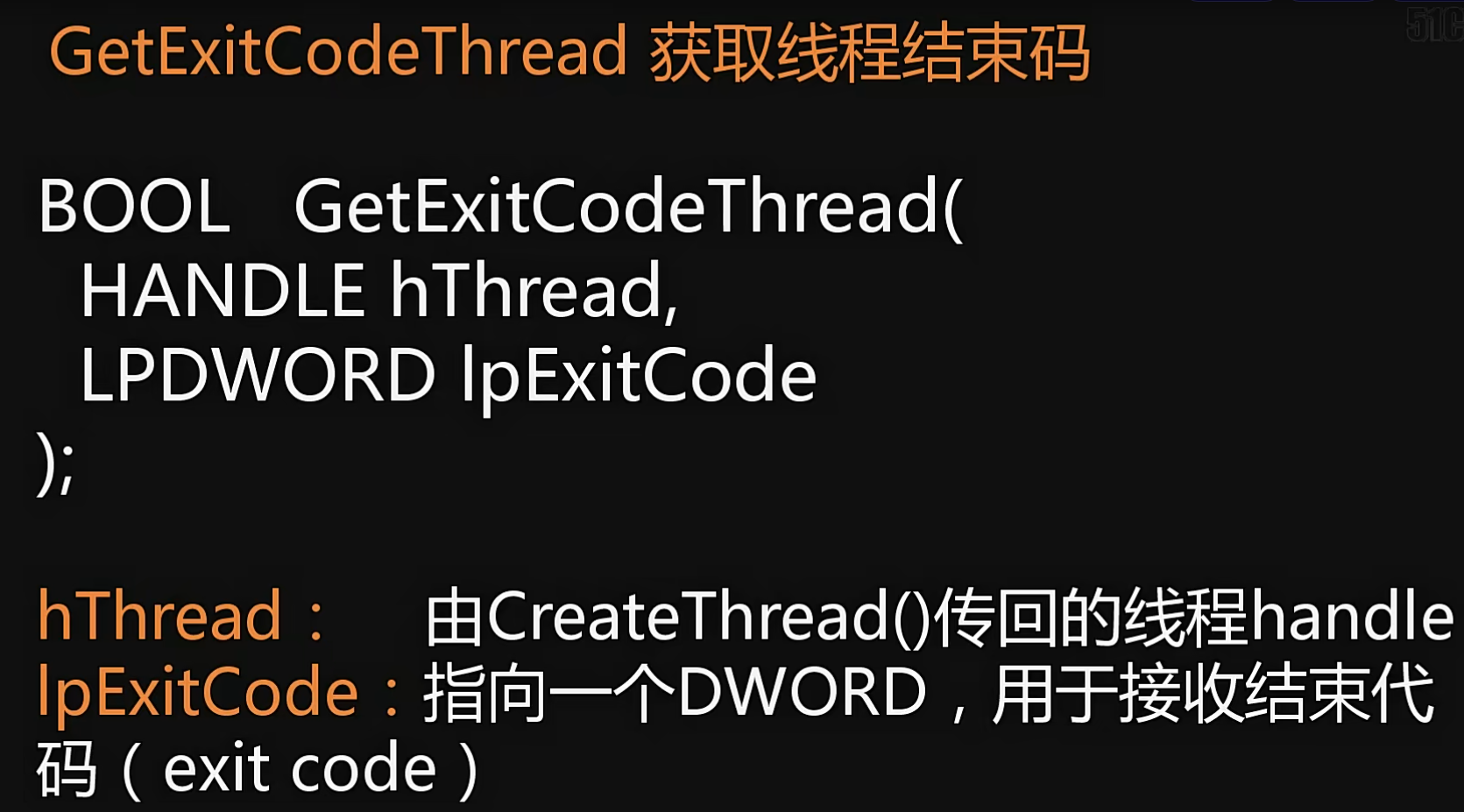
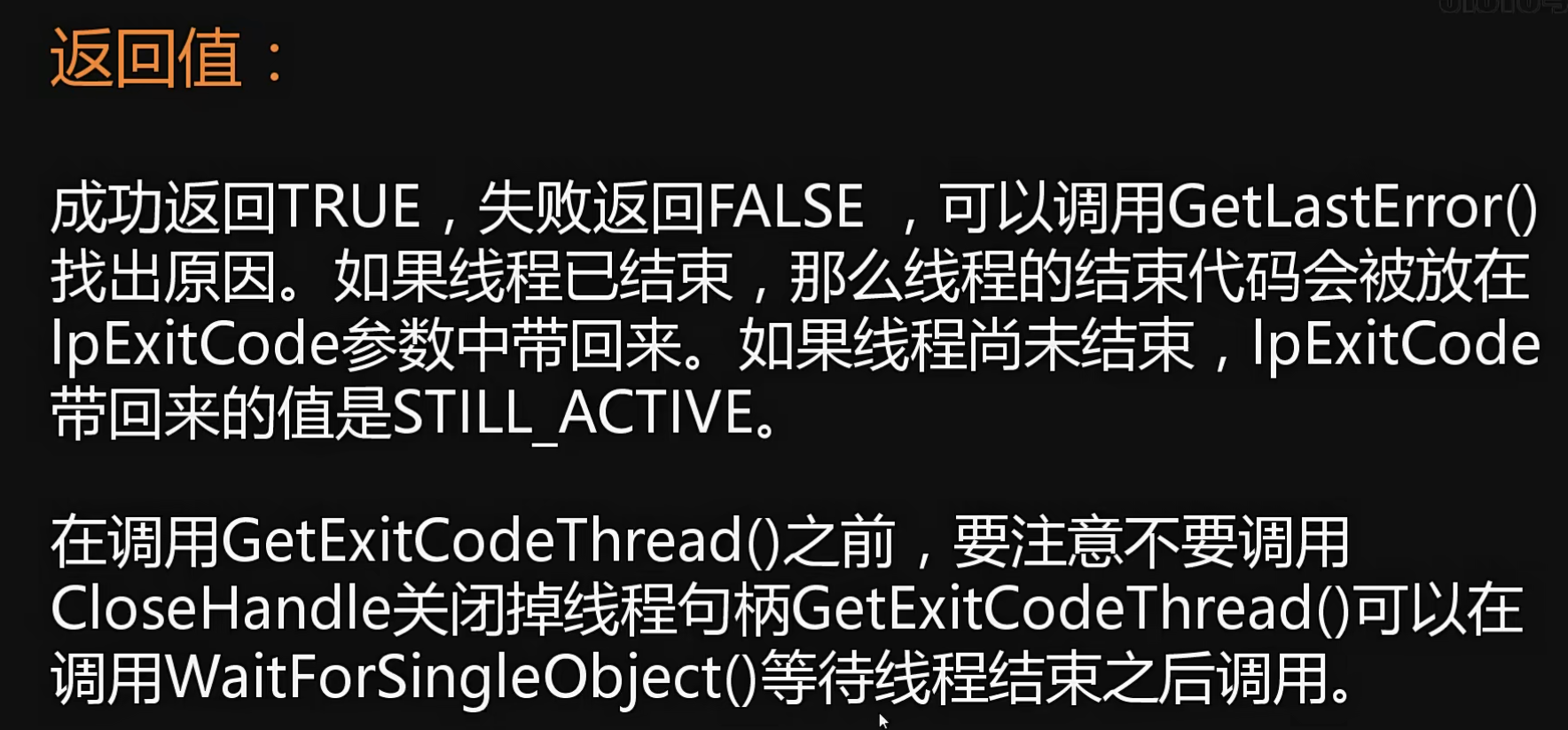
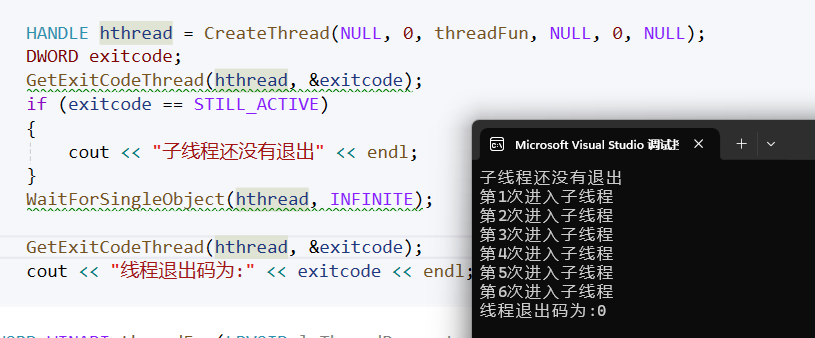
9.获取线程结束码
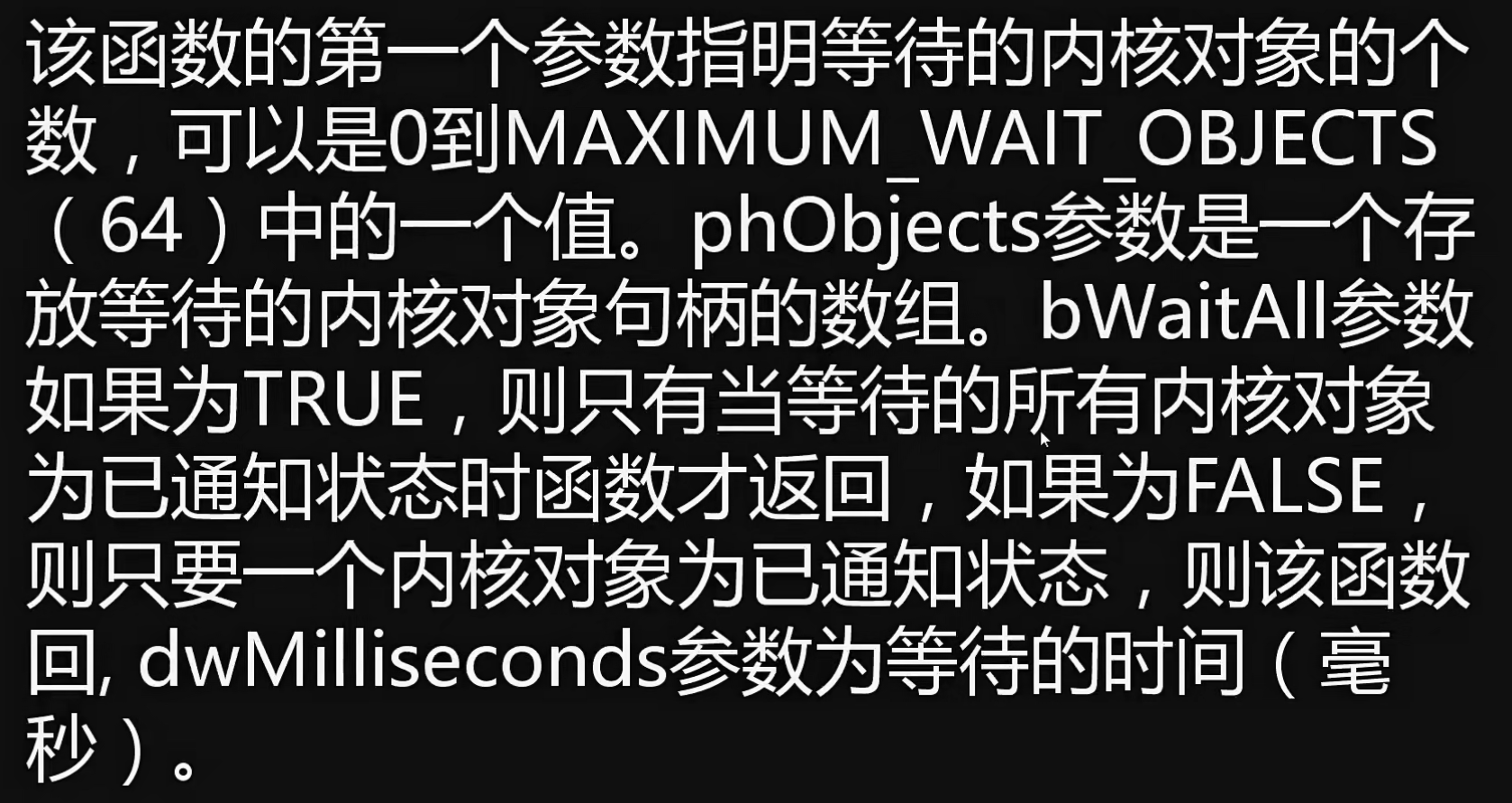
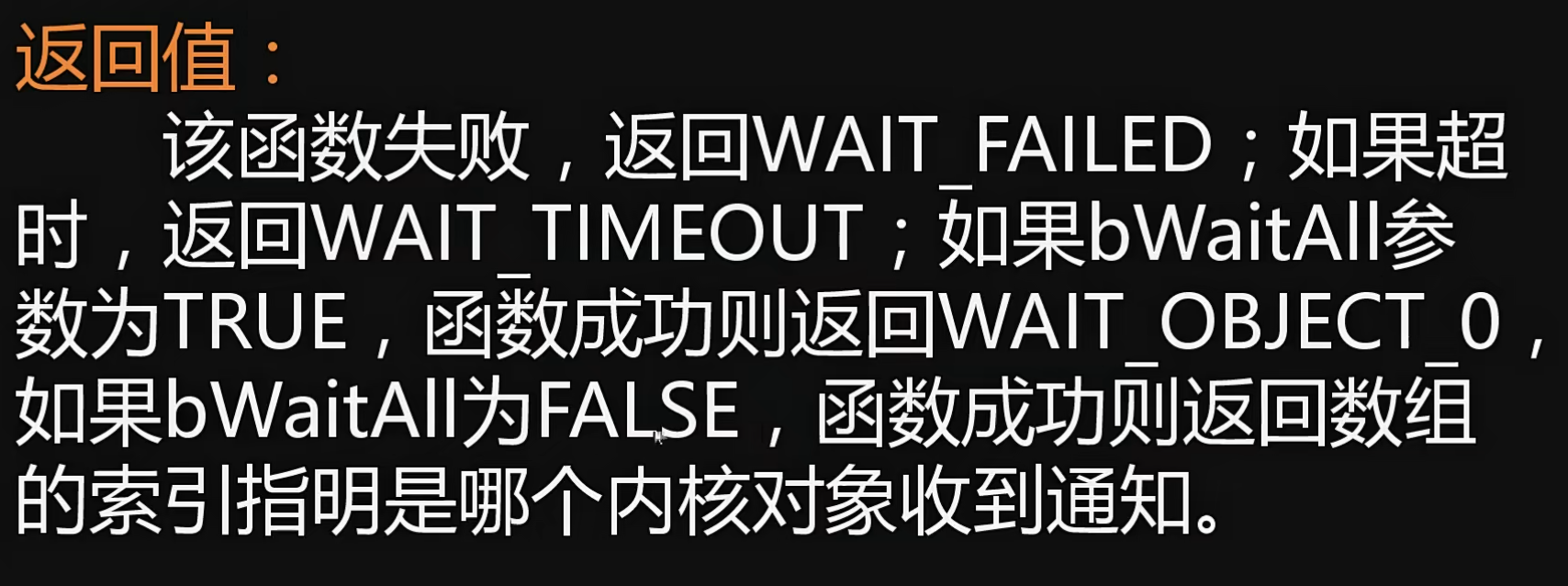
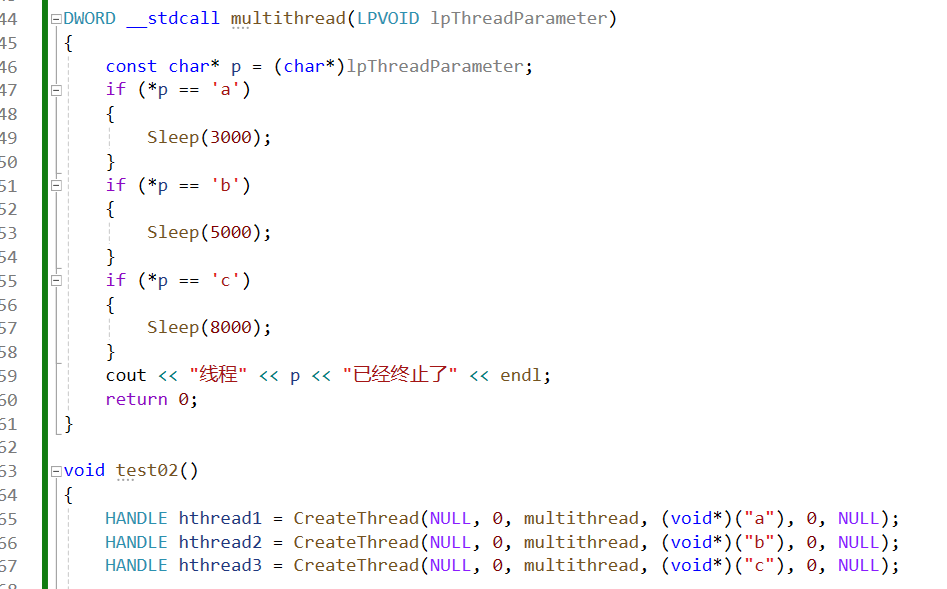
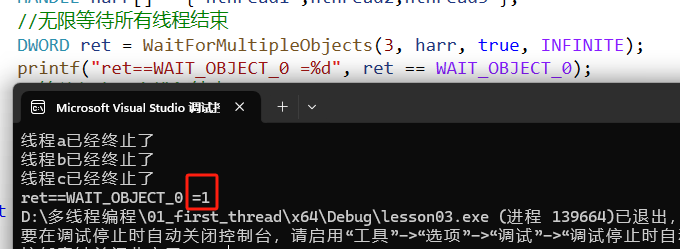
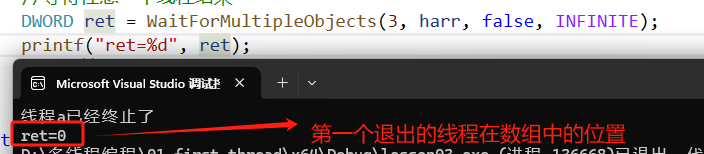
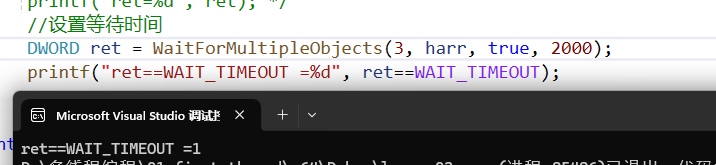
10.WaitForMultipleObjects
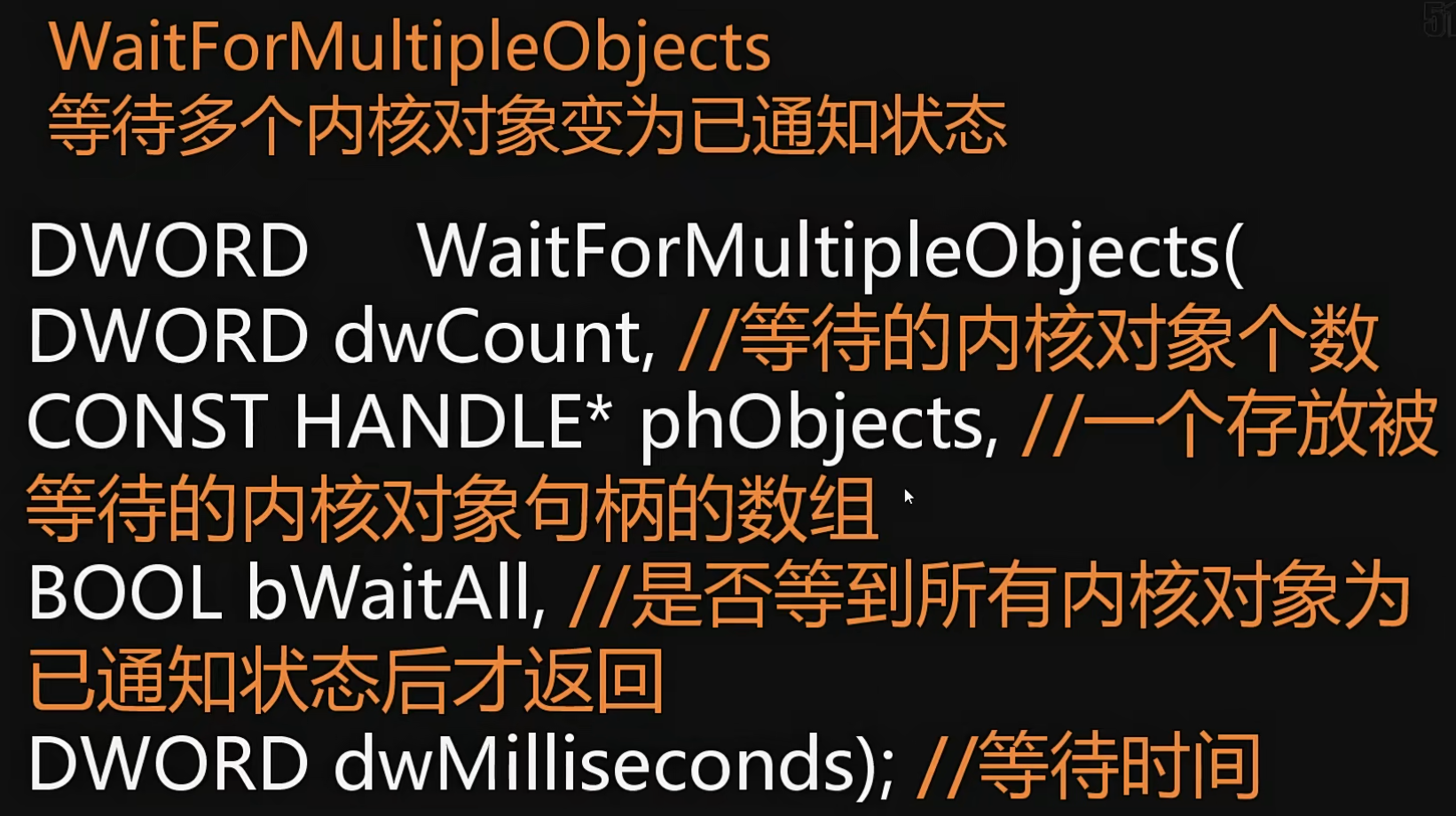
参数说明:
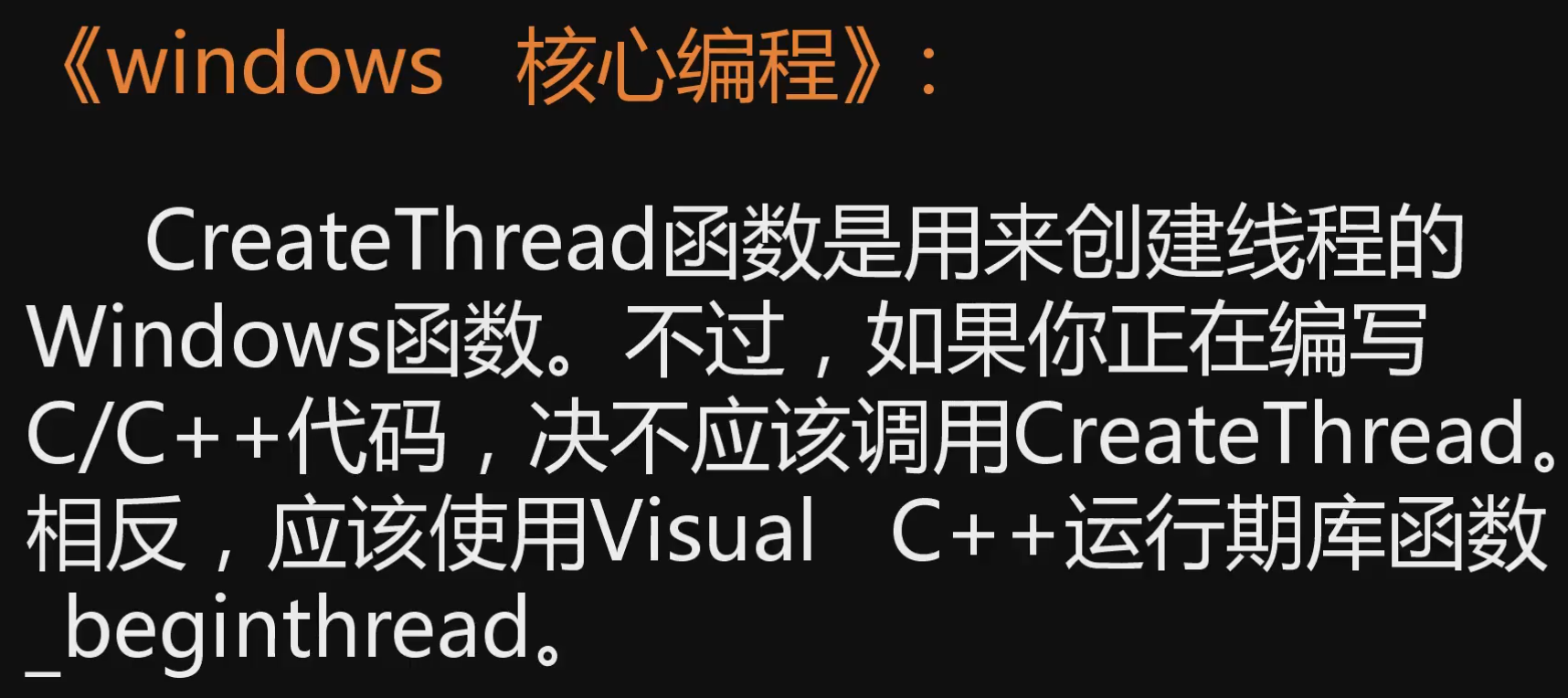
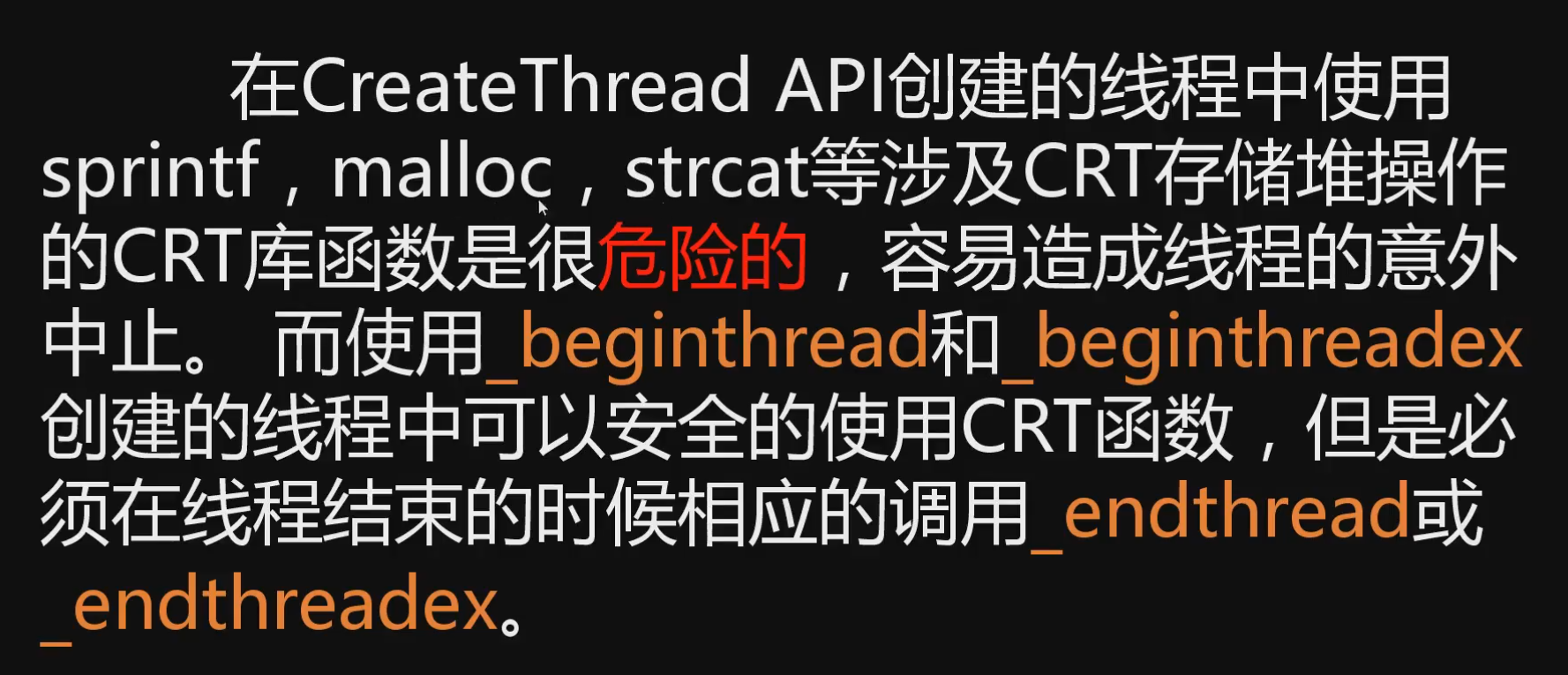
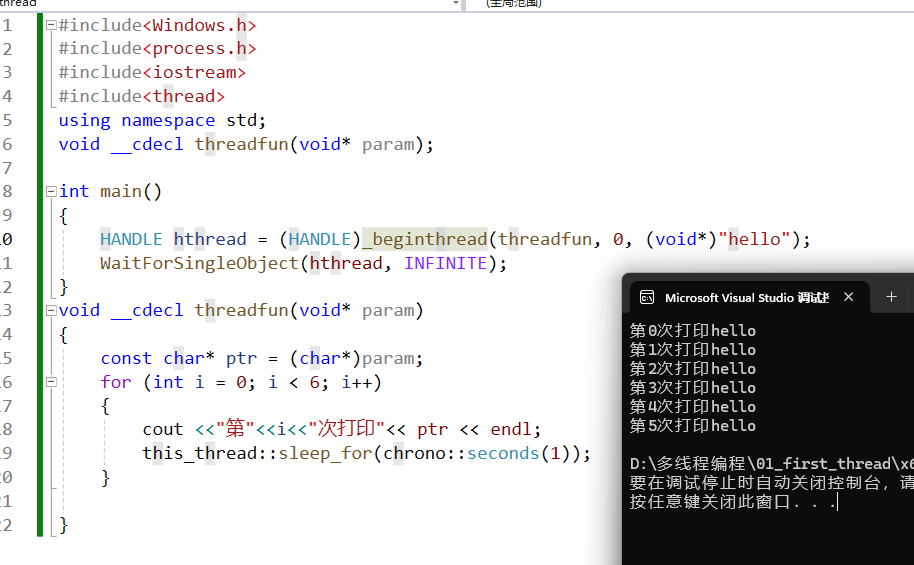
11._beginthread和_endthread
CreateThread不安全
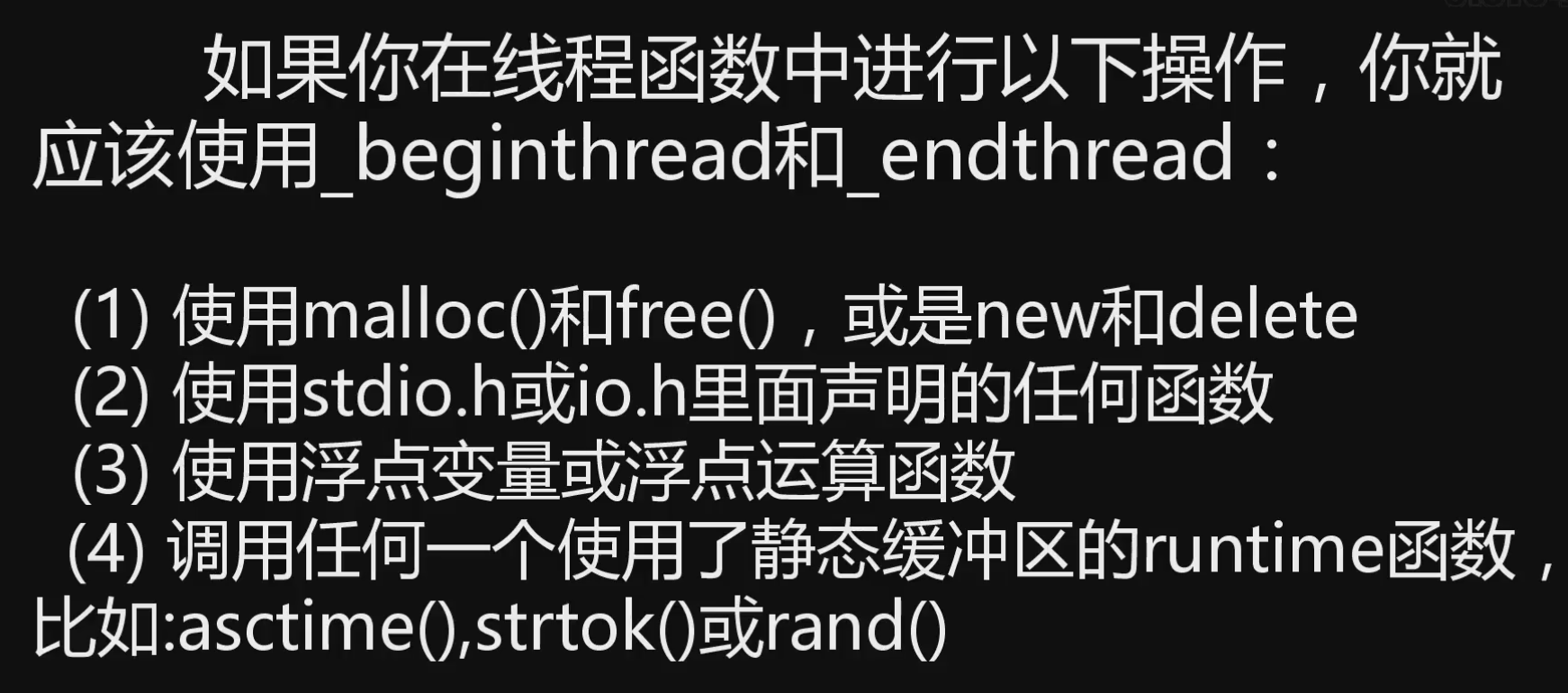
_beginthread
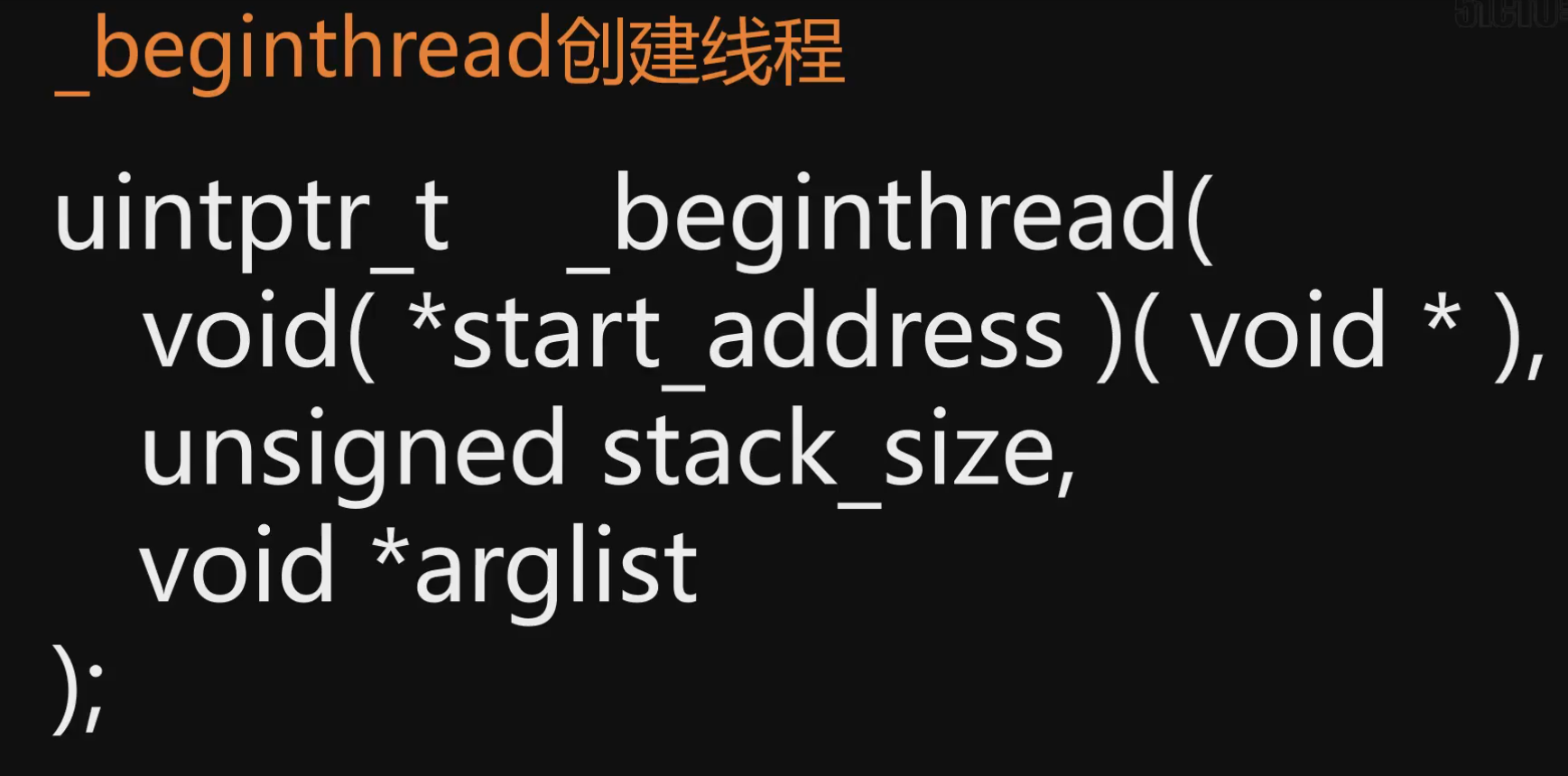
参数说明:
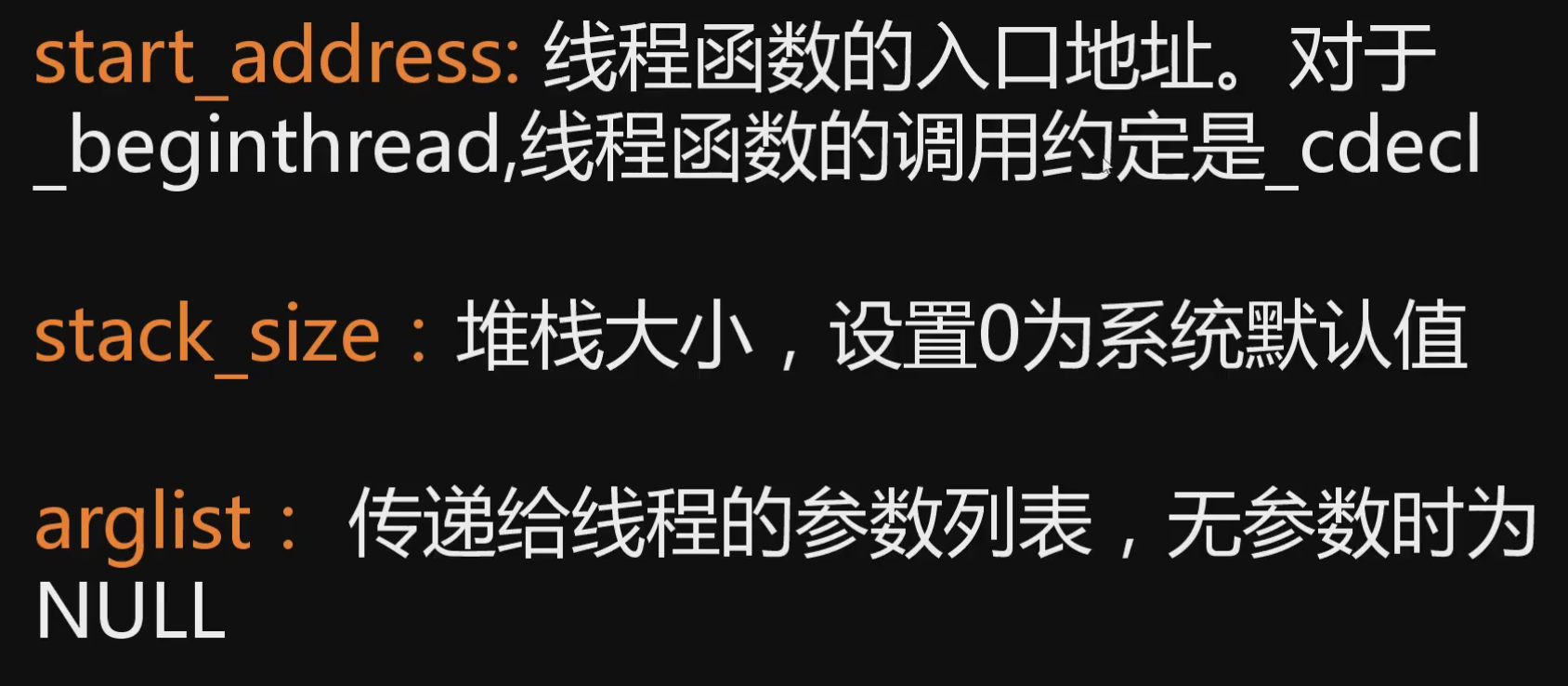
返回值:
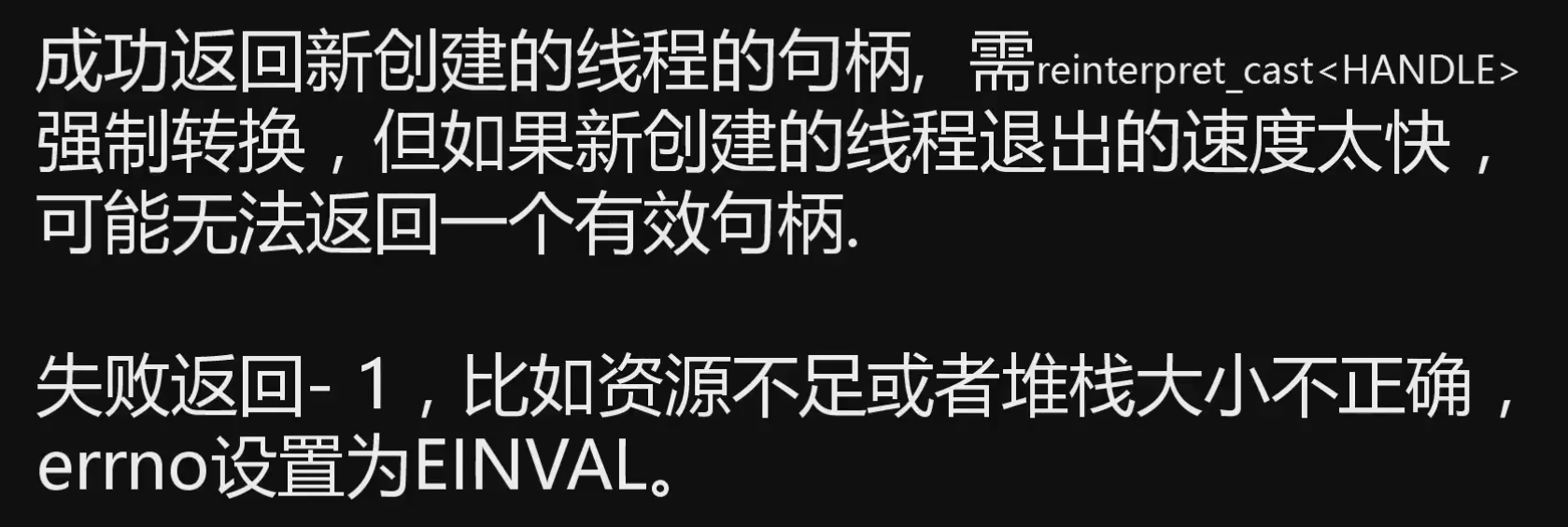
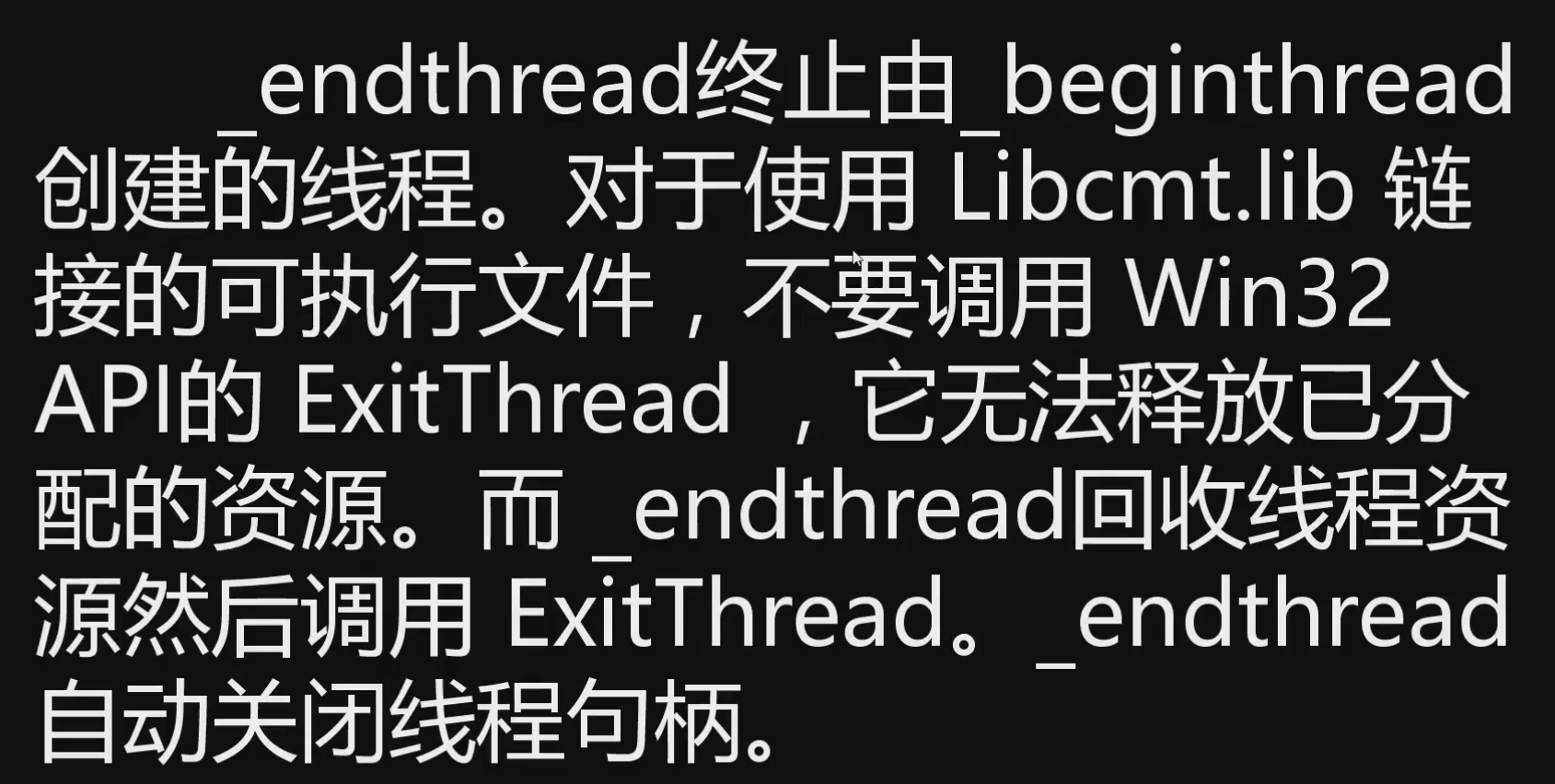
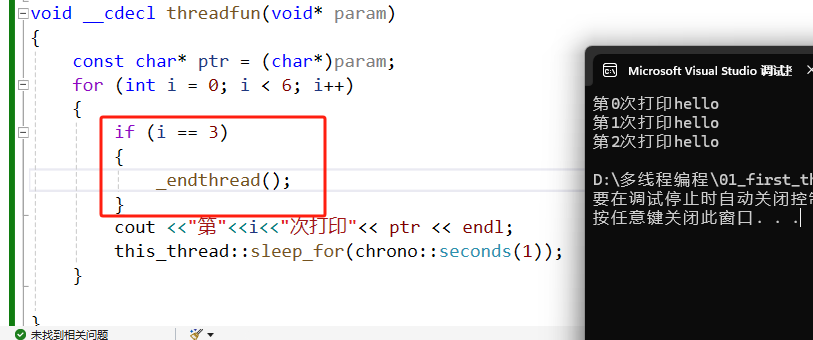
_endthread
三、多线程模拟火车站售票
1.介绍
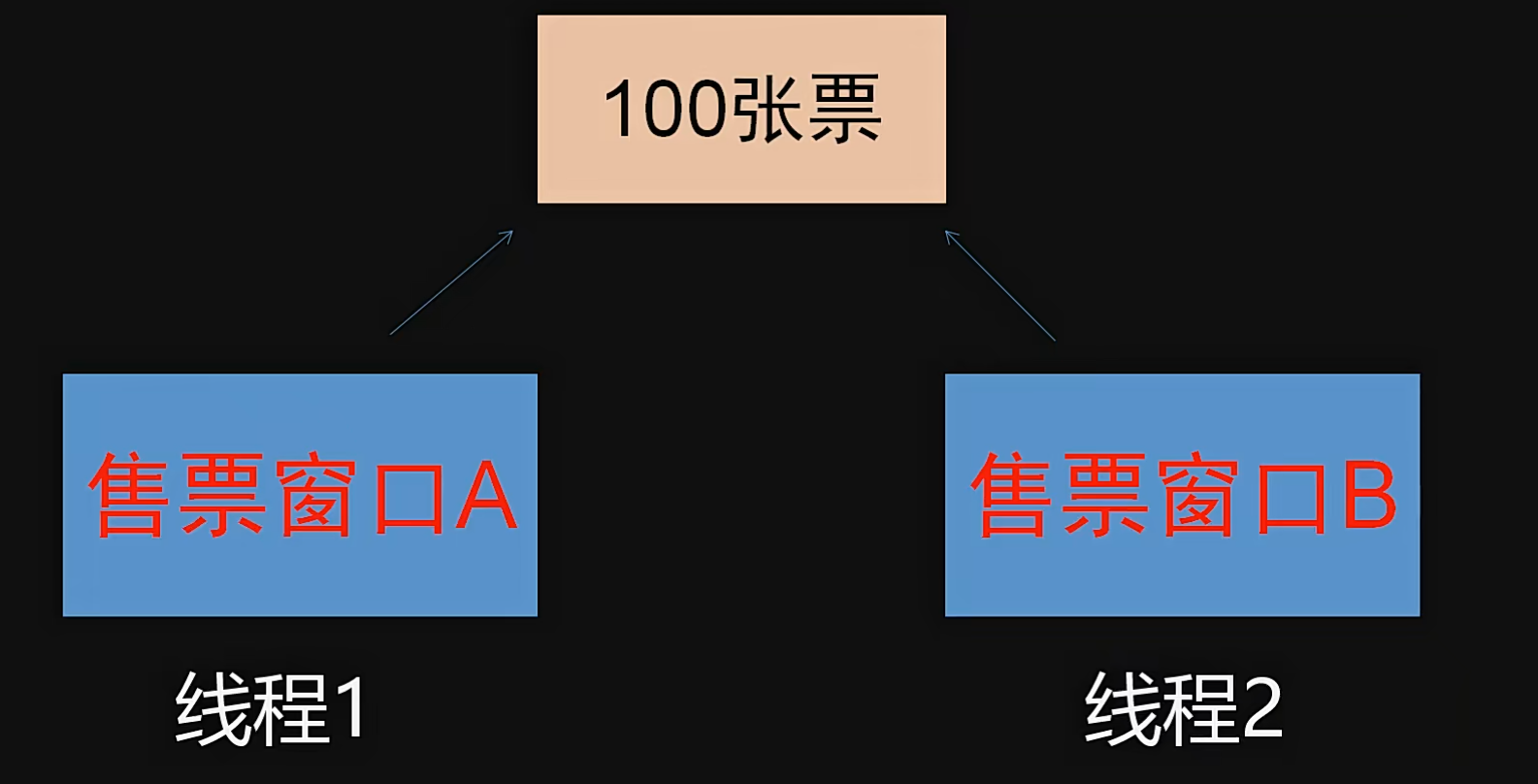
2.实现
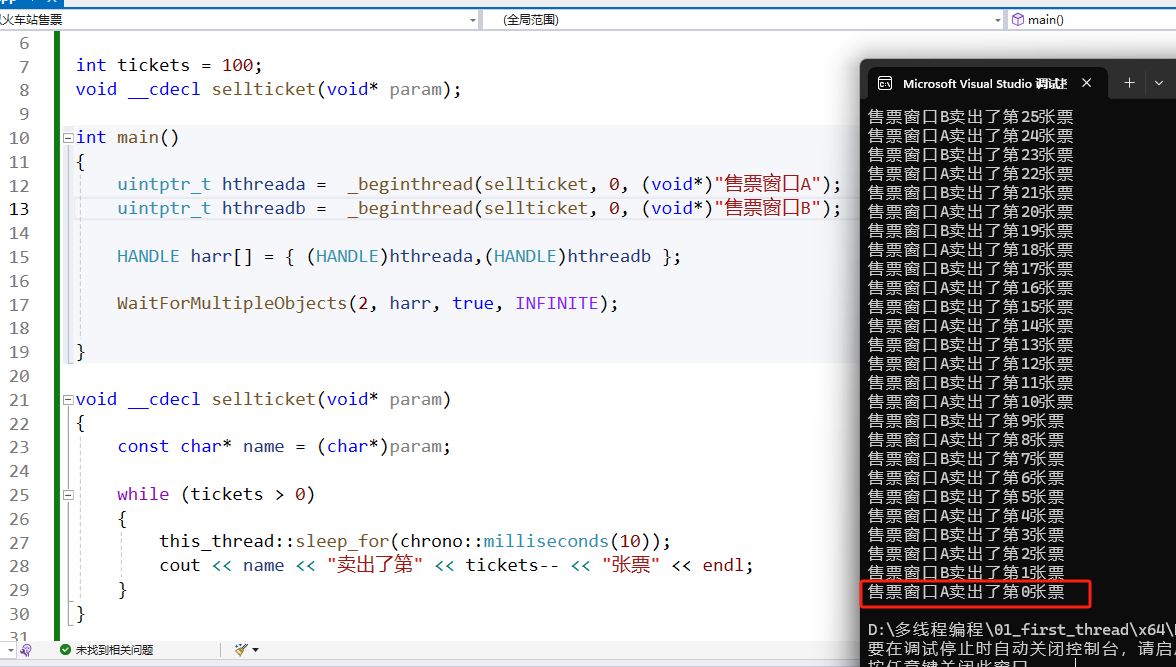
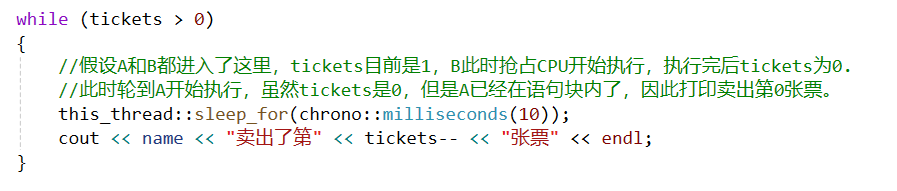
3.为什么会出现卖出了第0张票?
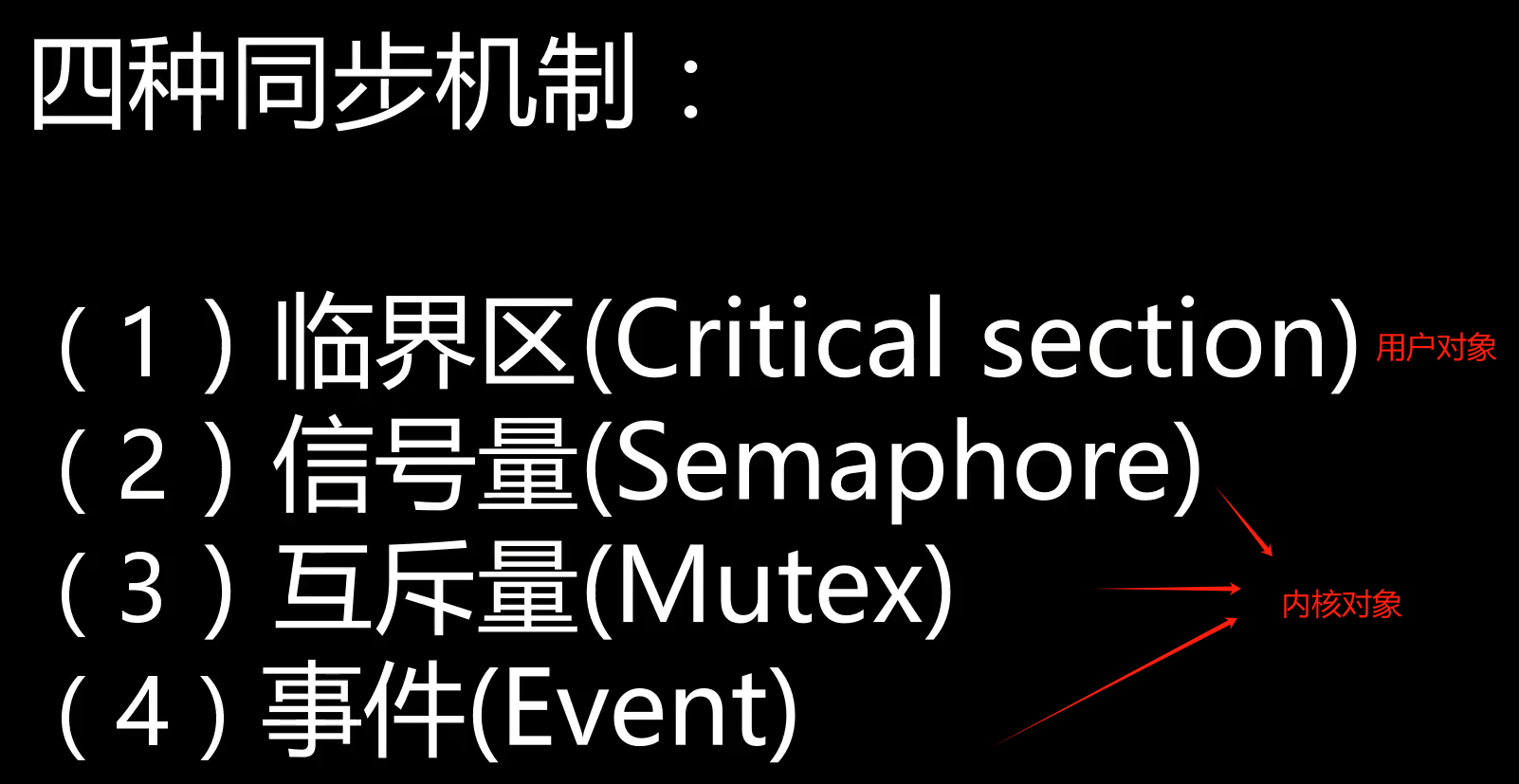
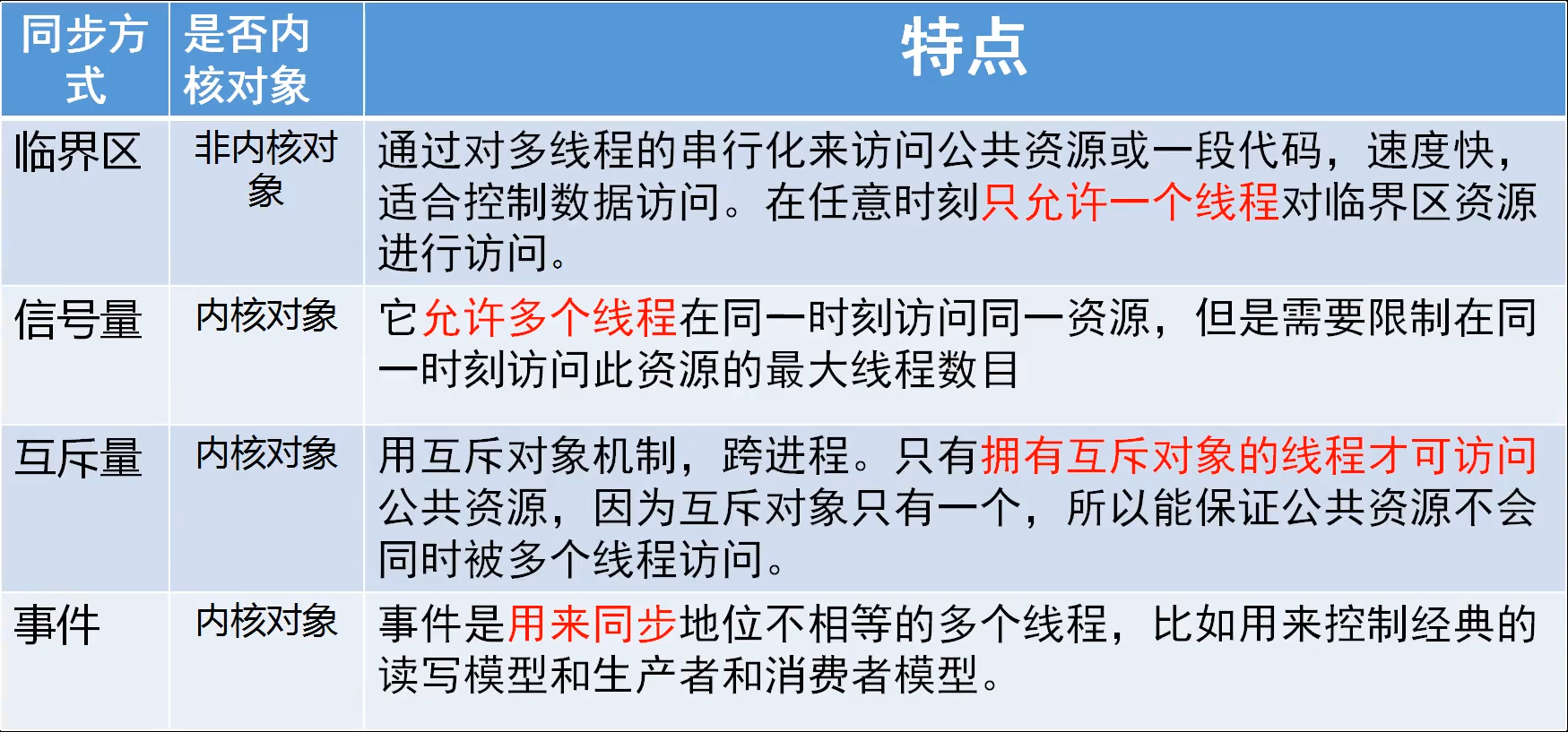
四、多线程之间的同步和互斥
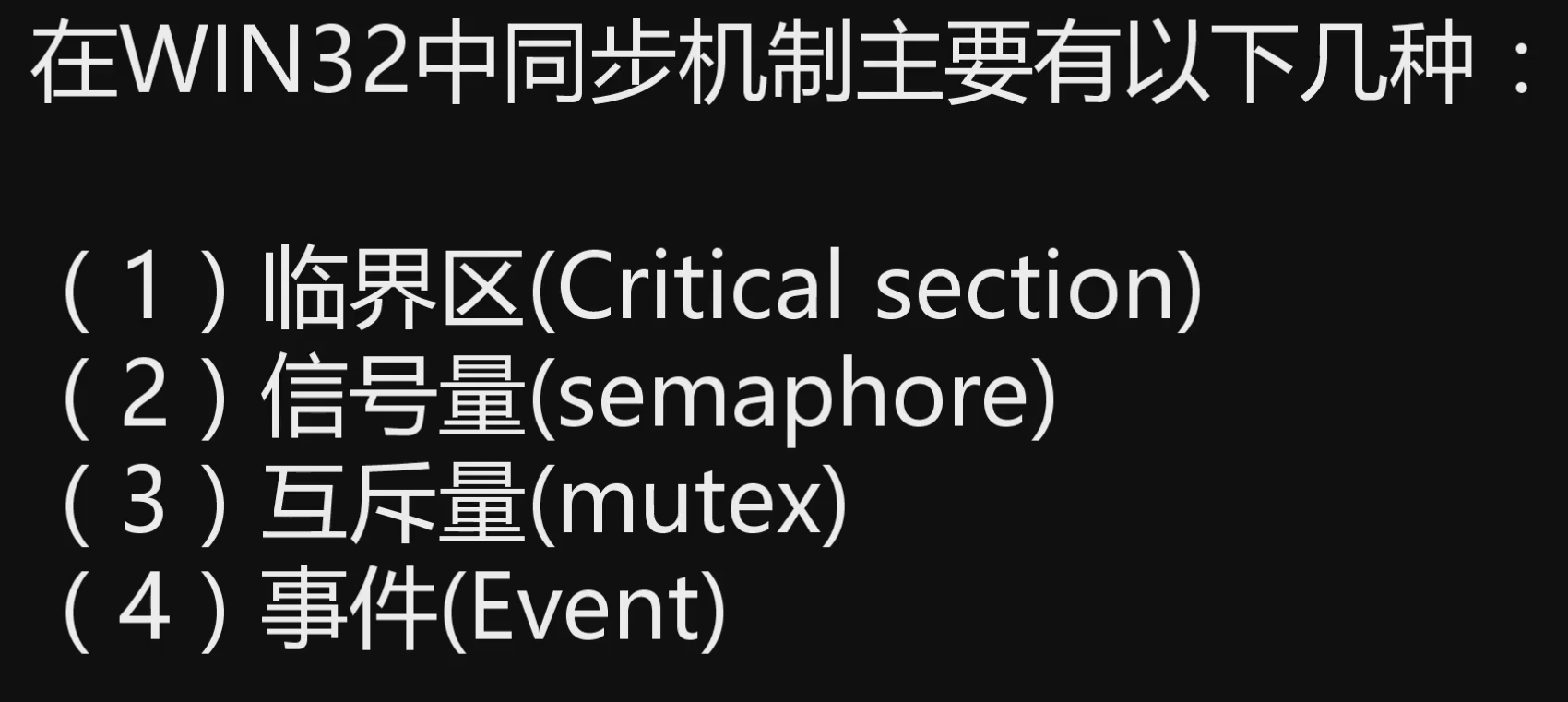
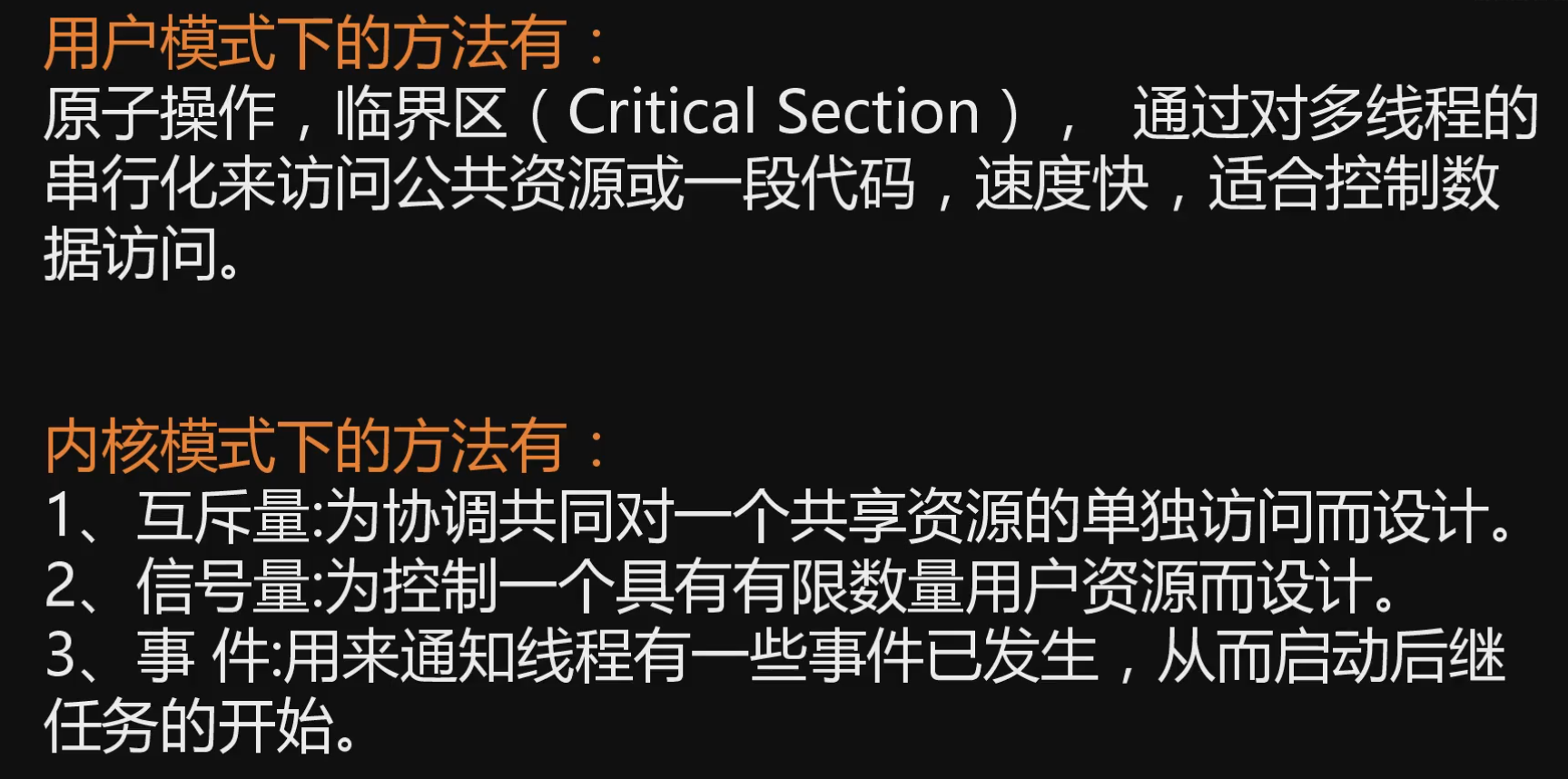
1.临界区
临界区结构对象
初始化临界区


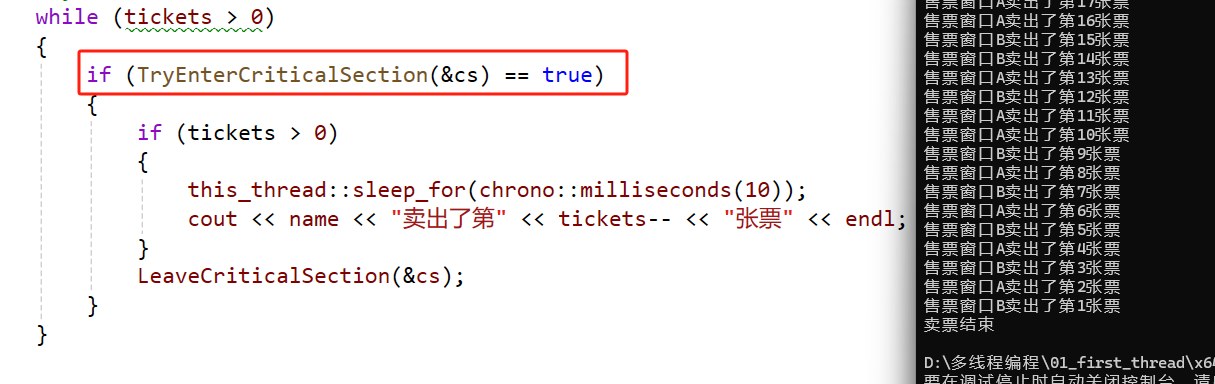
进入和离开临界区
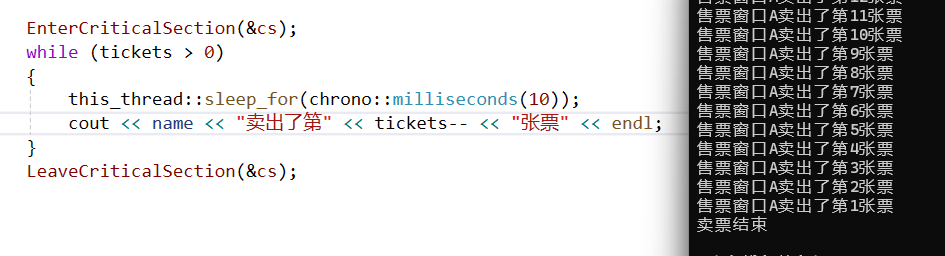
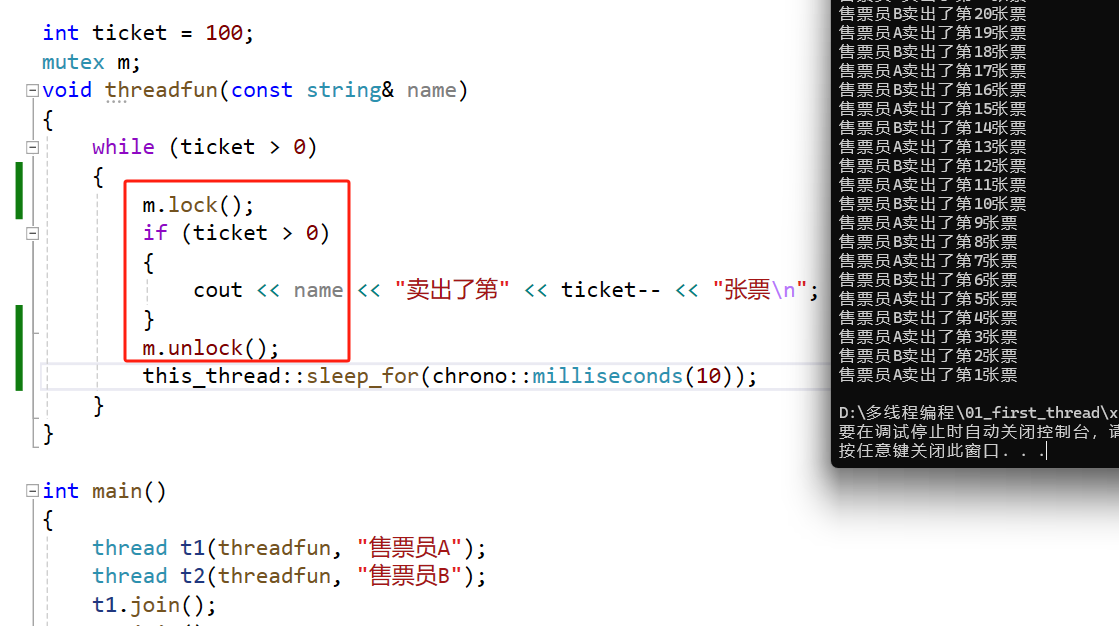
如果这样加锁,那么只要有一个线程进入临界区,除非所有票卖完,否则不会释放临界区。
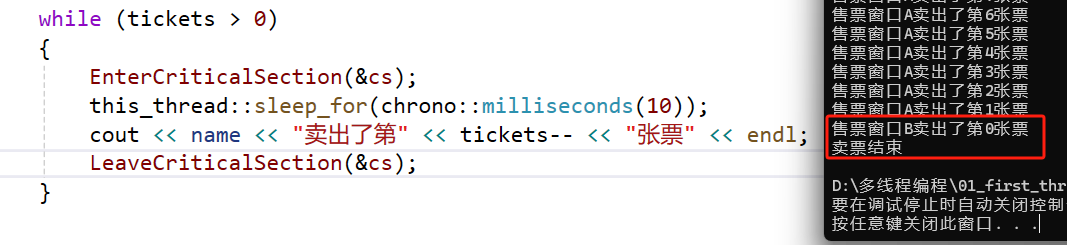
如果这样加锁,又会出现卖出第0张票的情况。
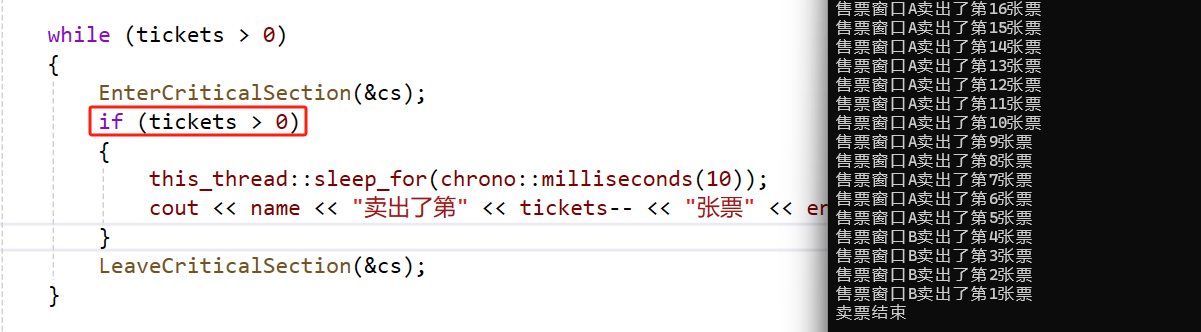
最后这种情况,修改代码,在进入临界区后再次判断,可以避免上述情况。
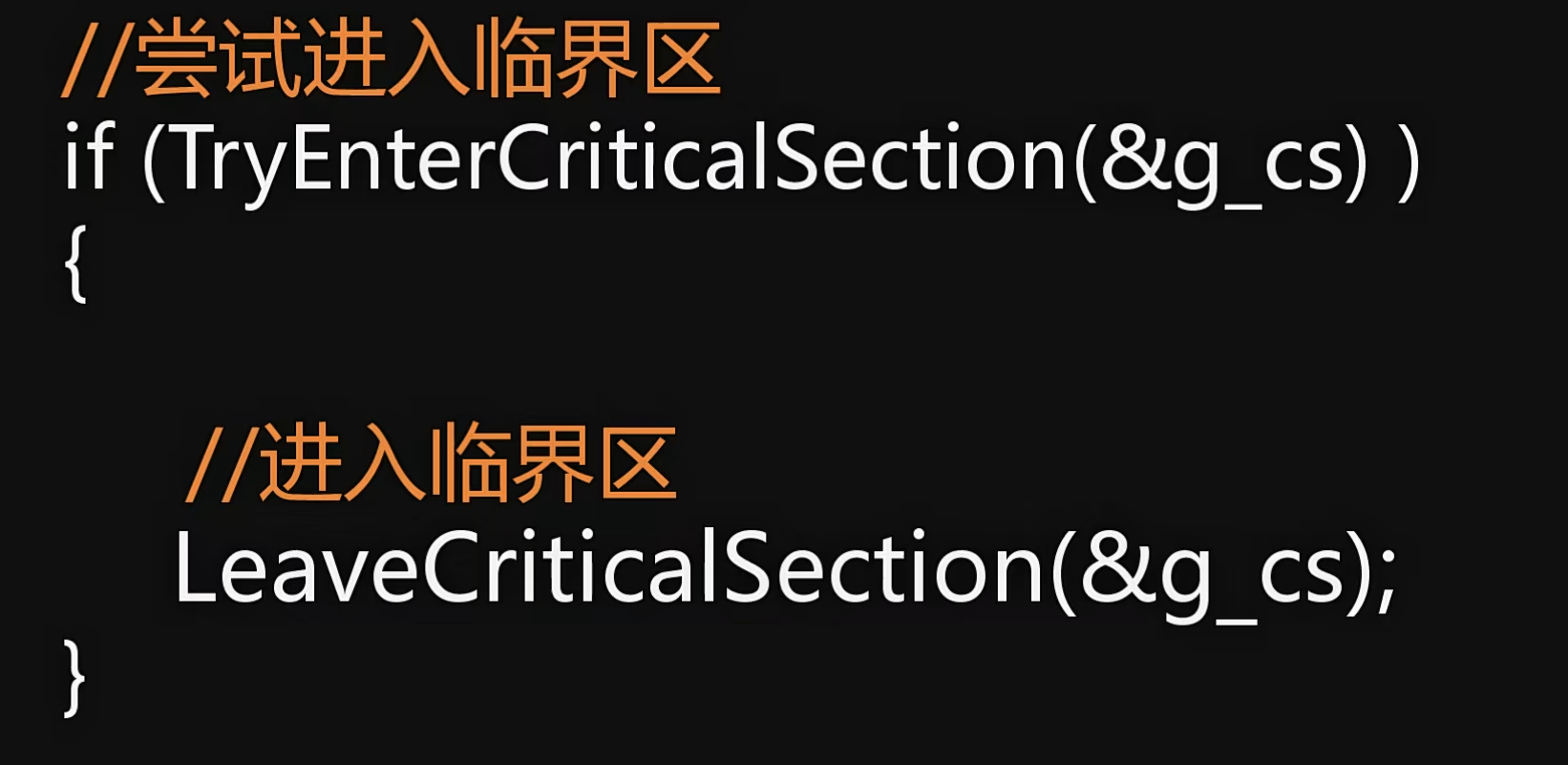
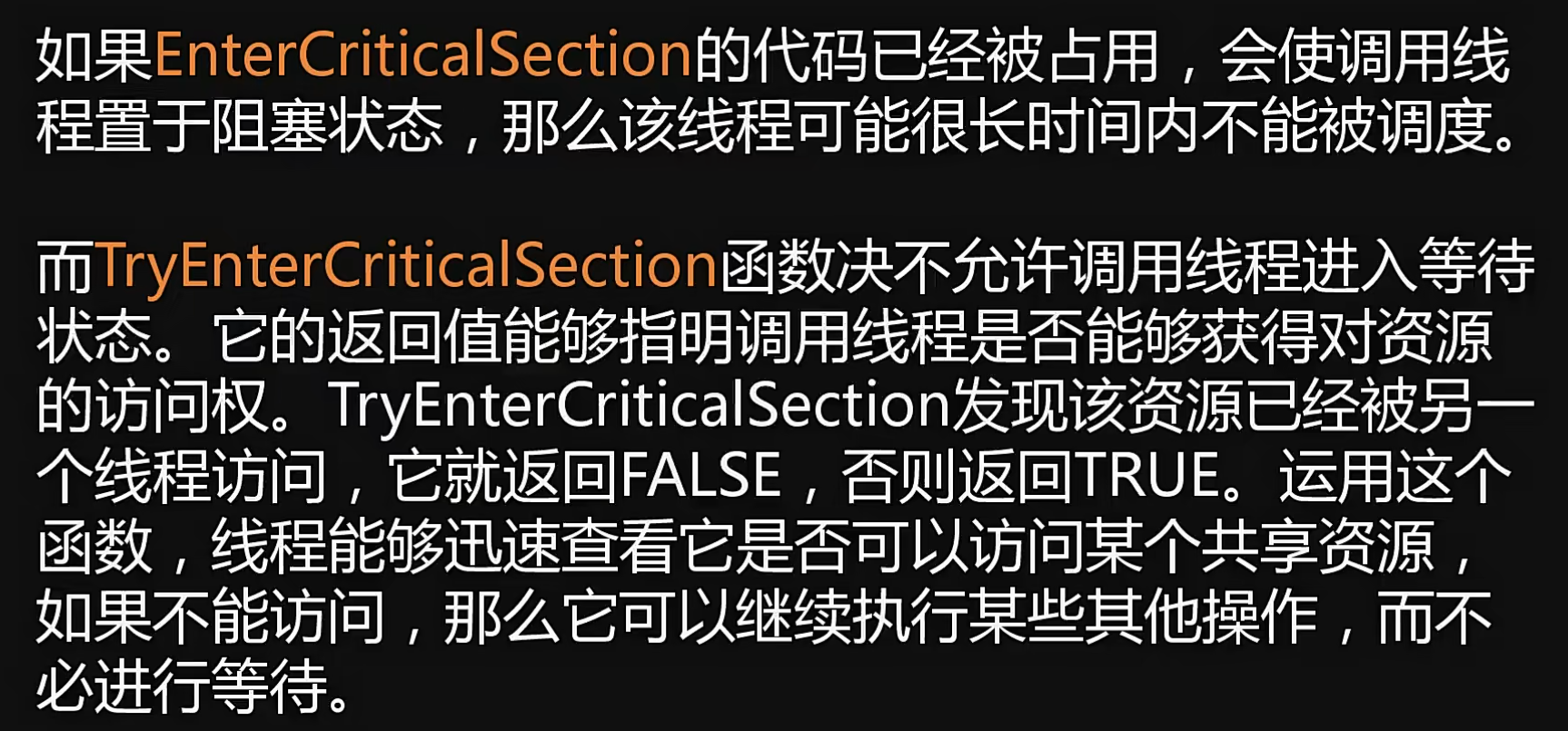
尝试进入临界区
区别
删除临界区

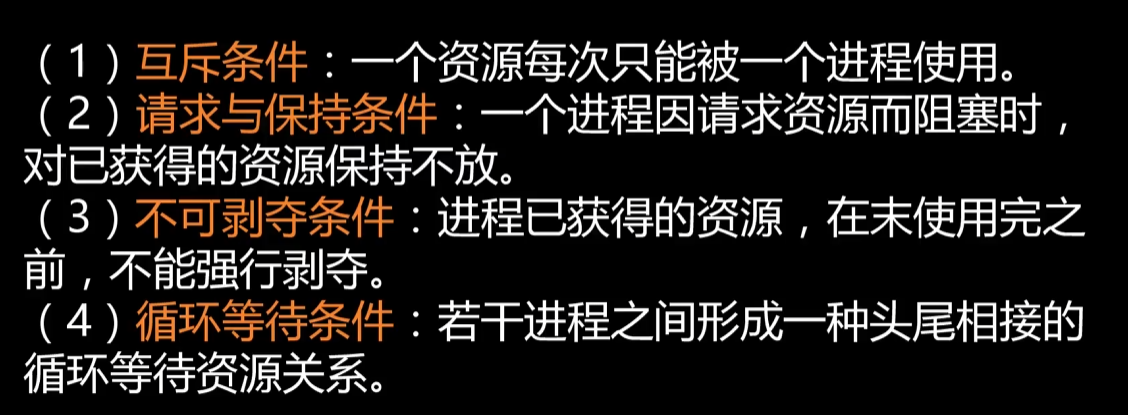
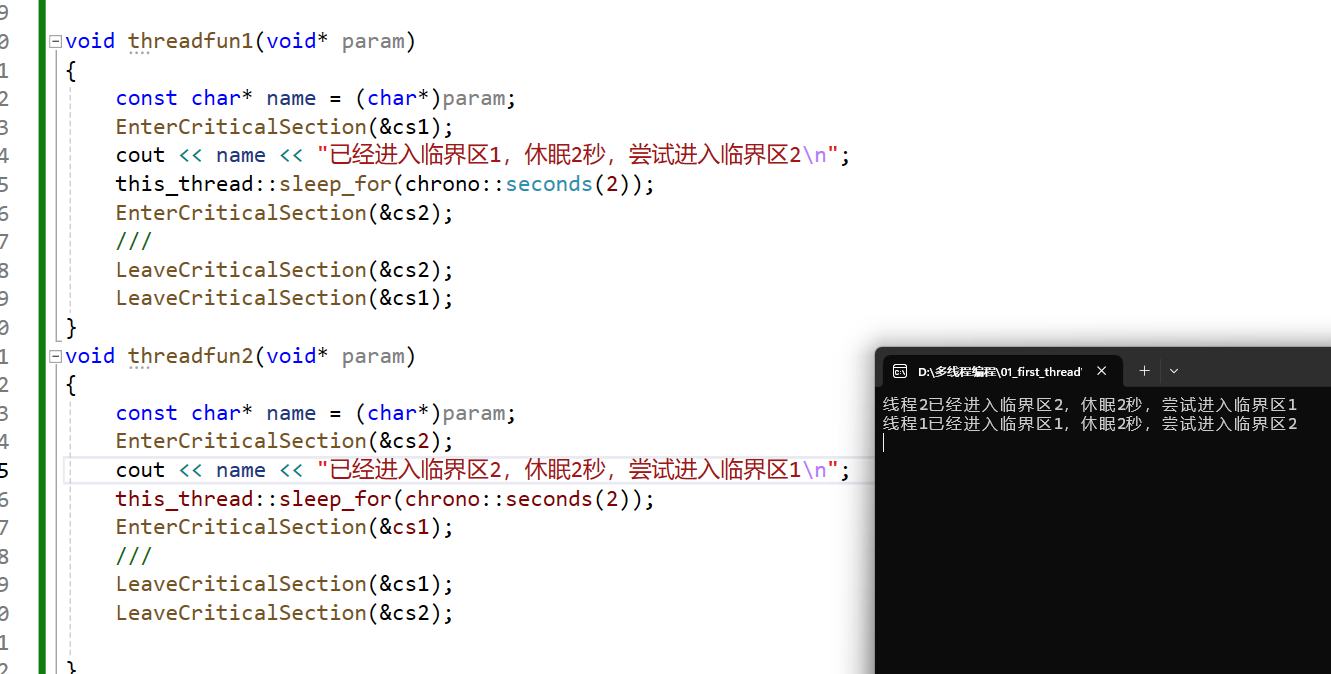
2.线程死锁
死锁产生的必要条件
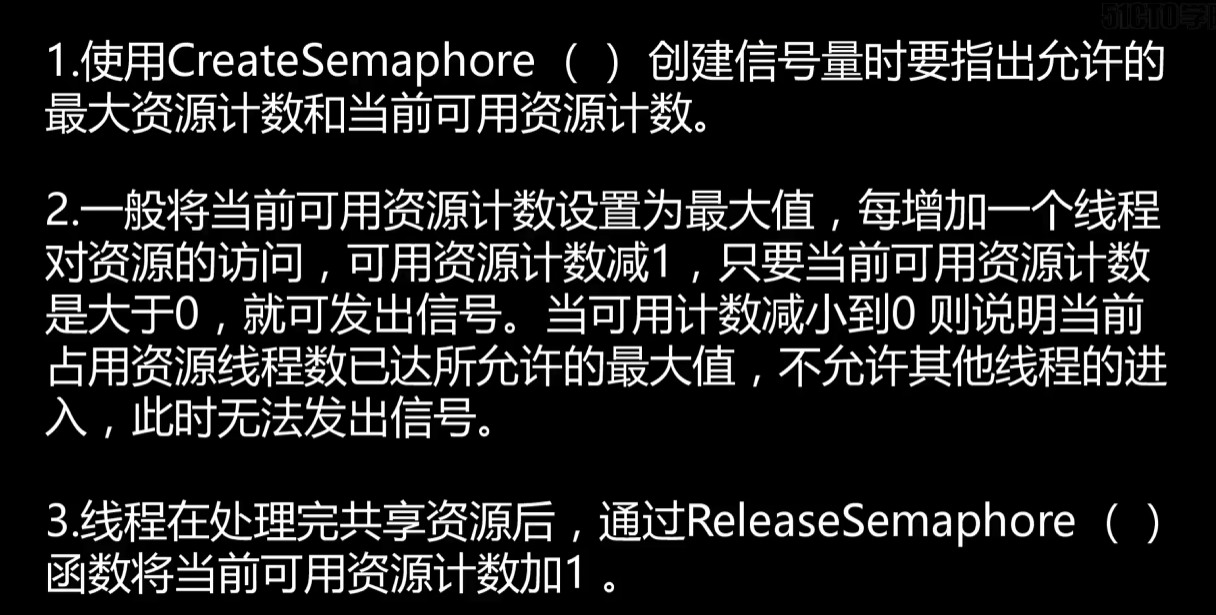
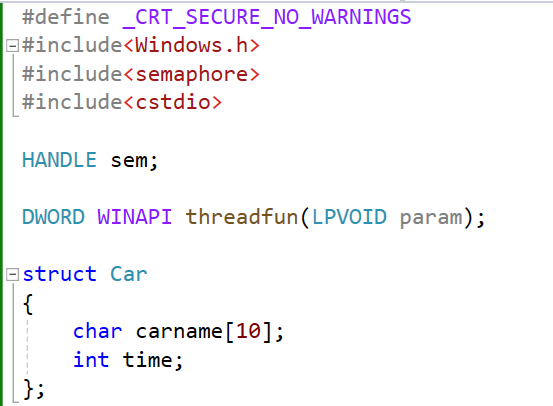
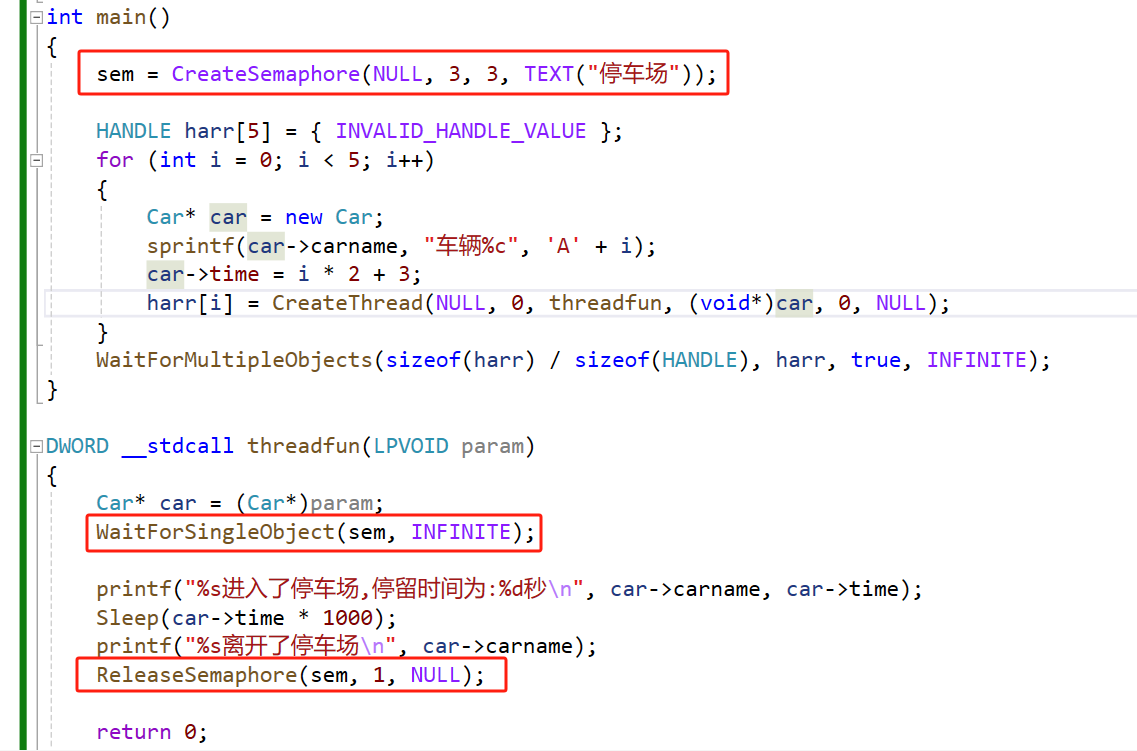
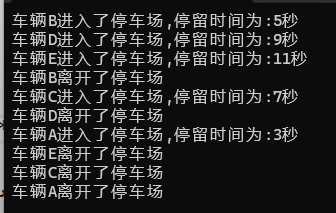
3.信号量
临界区与信号量对比
-
临界区
-
用于保护共享资源的代码块,确保在同一时间只有一个线程能够执行该代码块。
-
通常用于同一进程内的线程同步。
-
-
信号量
-
是一种更通用的同步机制,允许多个线程同时访问一定数量的共享资源。
-
可以用于进程间同步(IPC)。
-


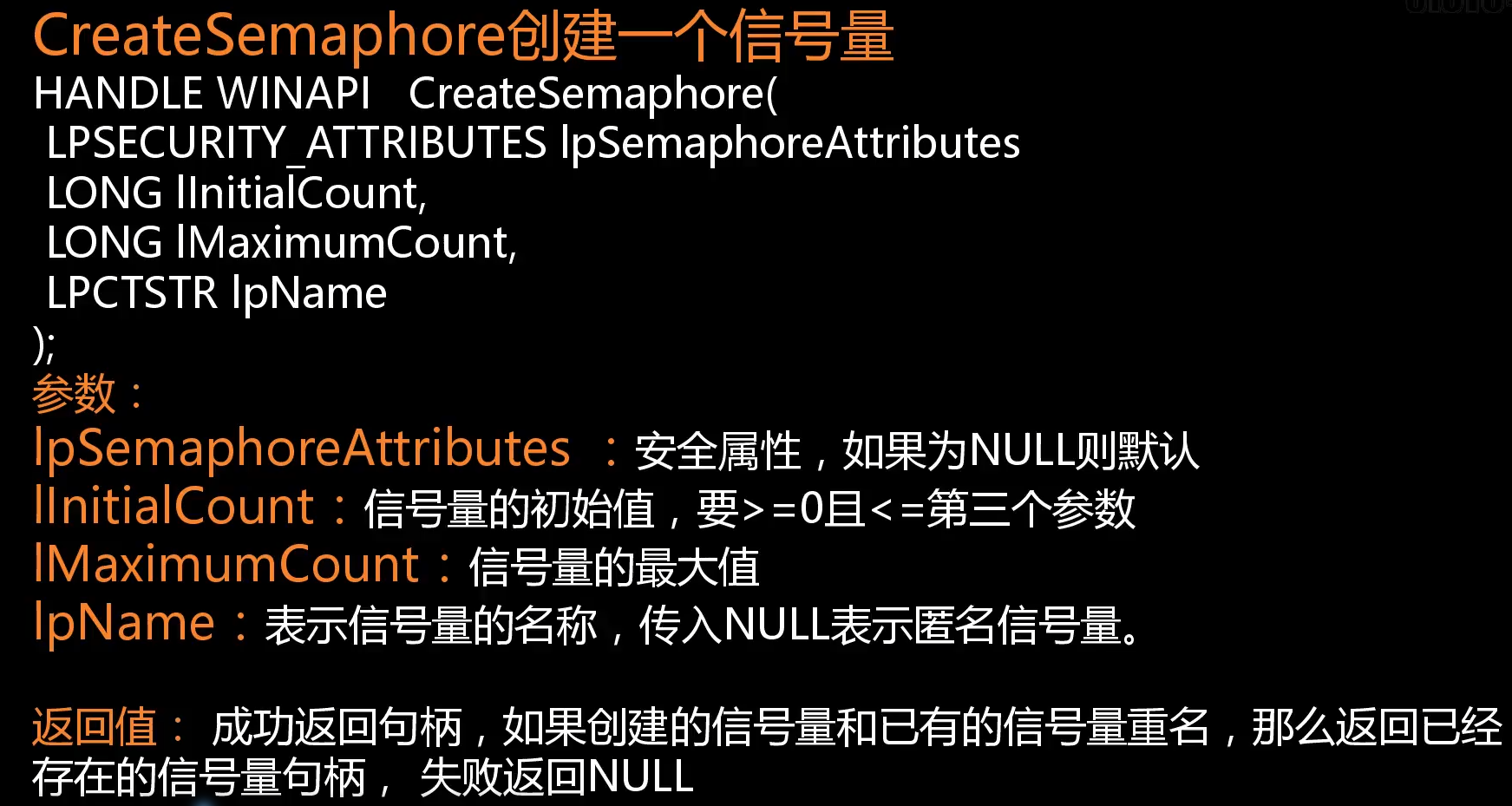
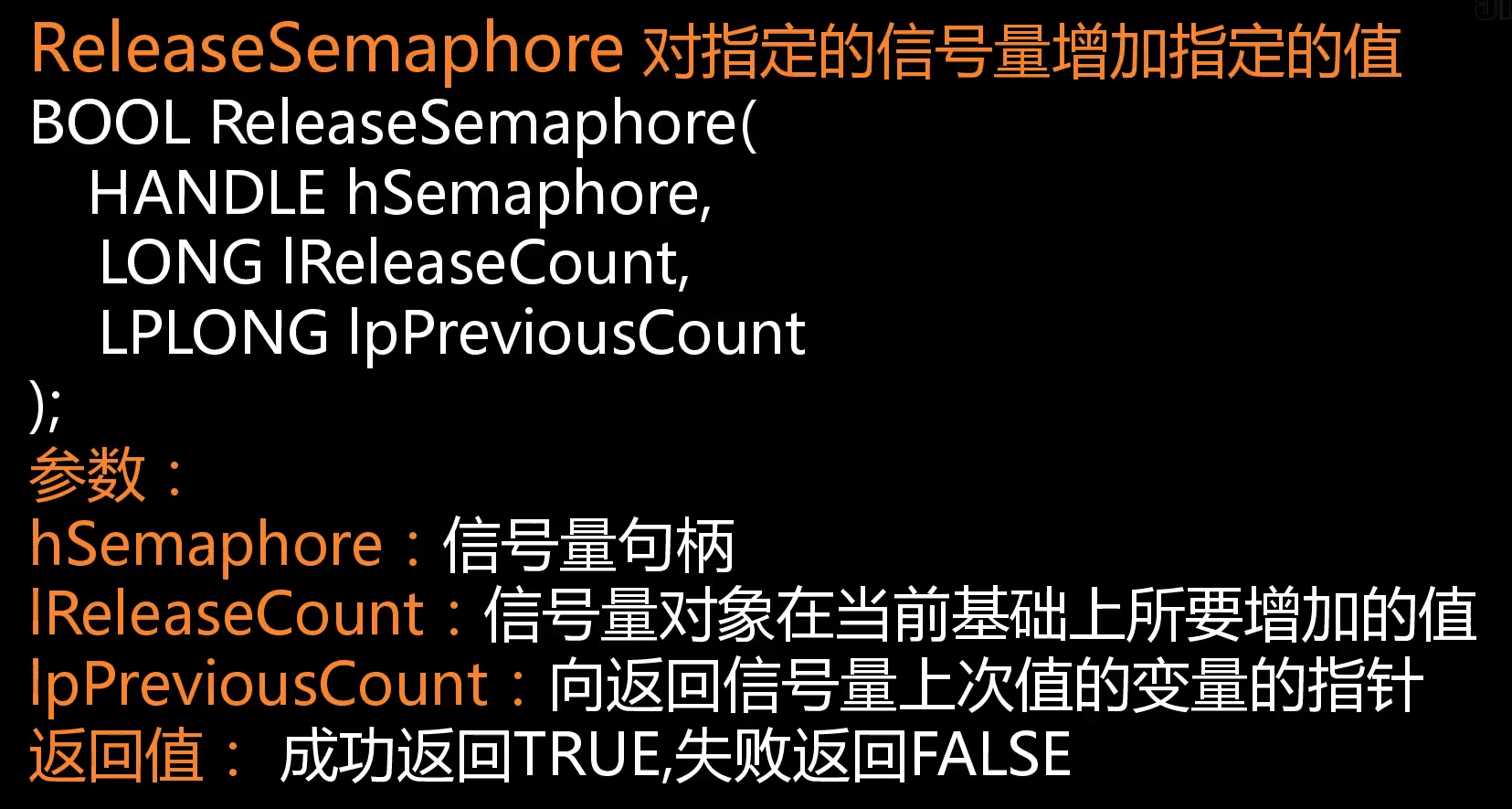
相关API
(1)创建信号量
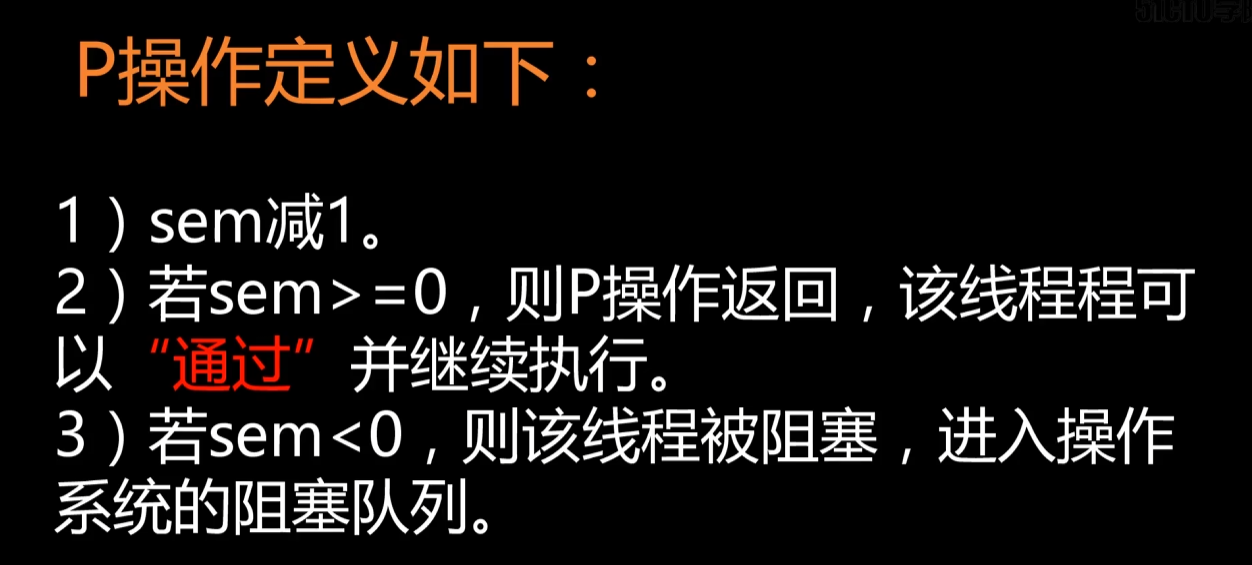
(2)P操作

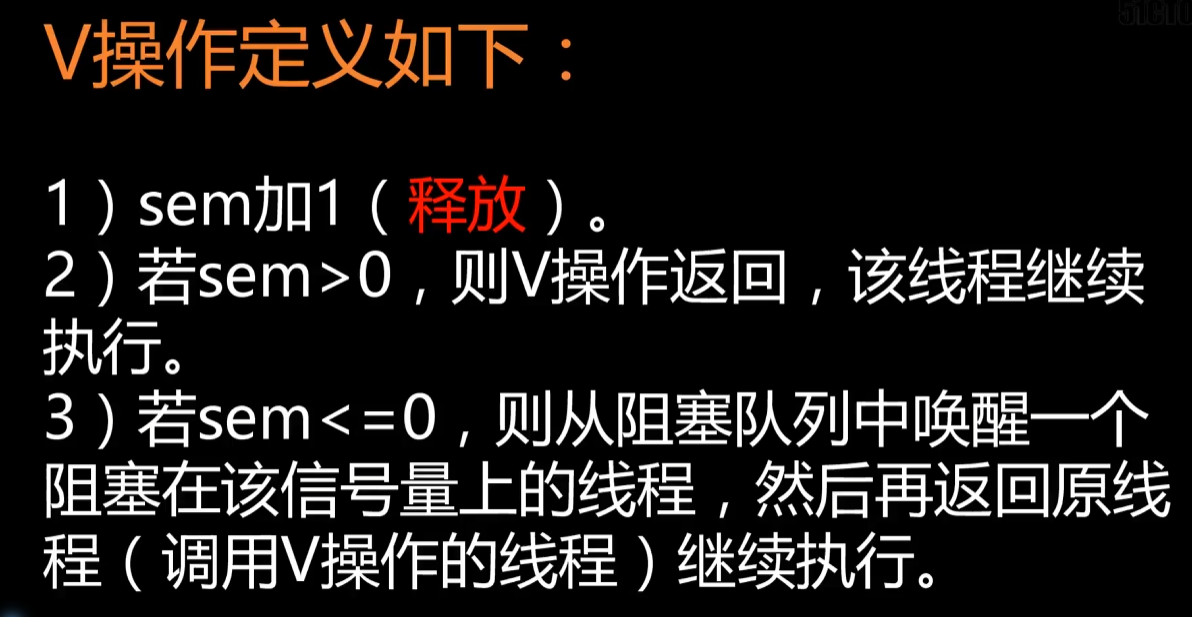
(3)V操作
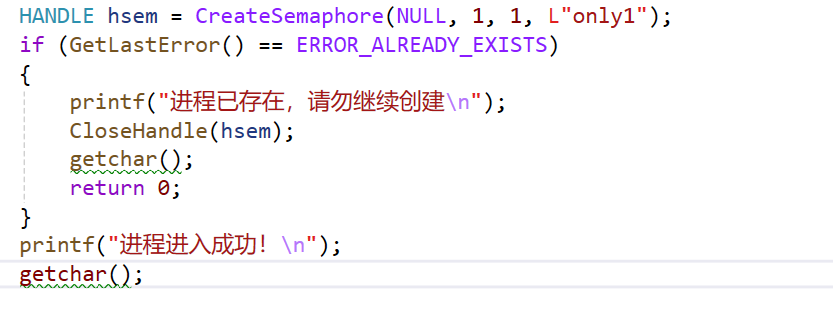
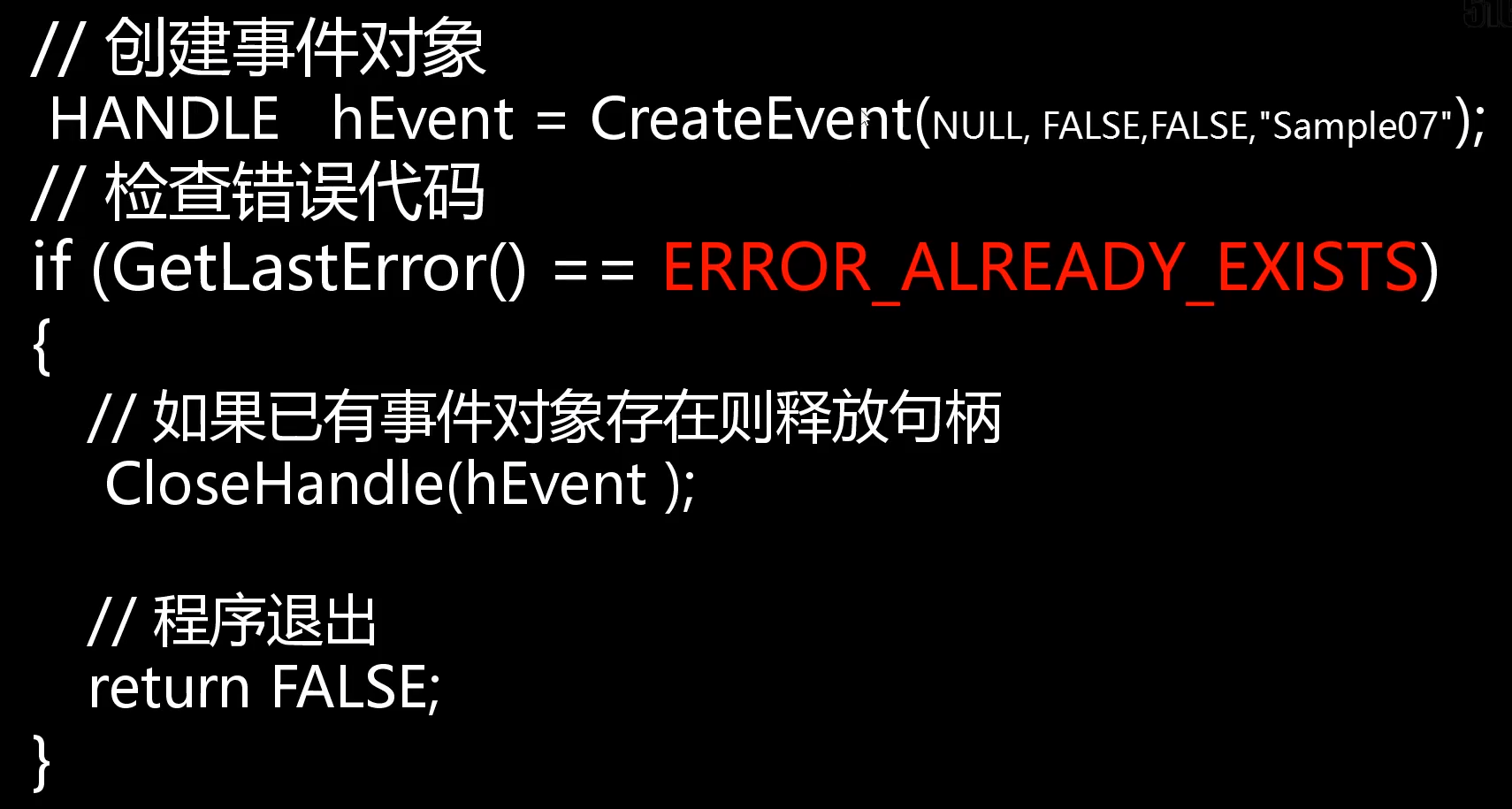
实现进程或线程只有一个实例
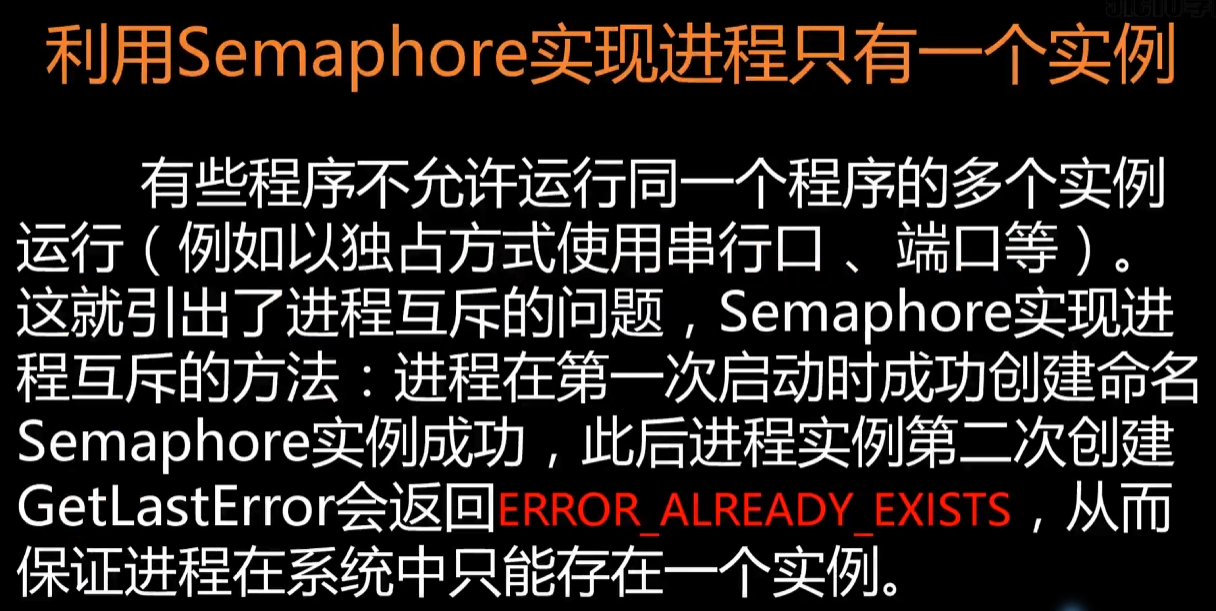
虽然每个进程有自己的地址空间,但命名对象(如命名信号量、命名互斥体等)是在系统范围内共享的。这意味着即使进程有各自的地址空间,命名对象在创建时会注册在操作系统的命名空间中,其他进程可以通过同样的名字访问这些对象。
在 Windows 操作系统中,命名对象(包括信号量、互斥体、事件等)在系统命名空间中共享。也就是说,当一个进程创建一个命名信号量时,操作系统会将该信号量注册在全局命名空间中。其他进程如果尝试创建或打开同名的信号量,就可以访问到这个信号量。
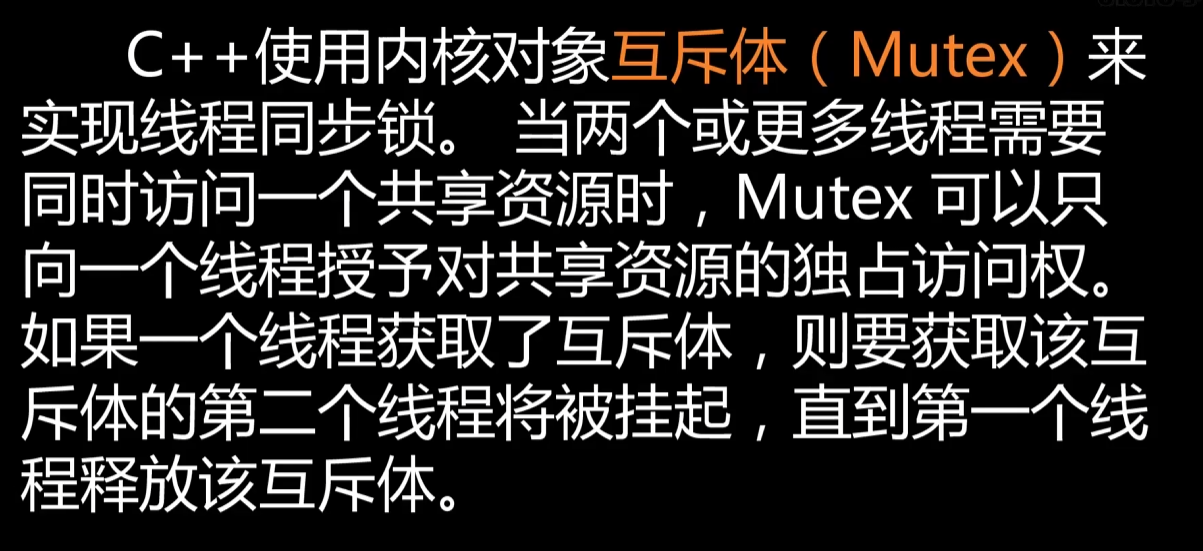
4.互斥量mutex
相关API
(1)创建互斥量
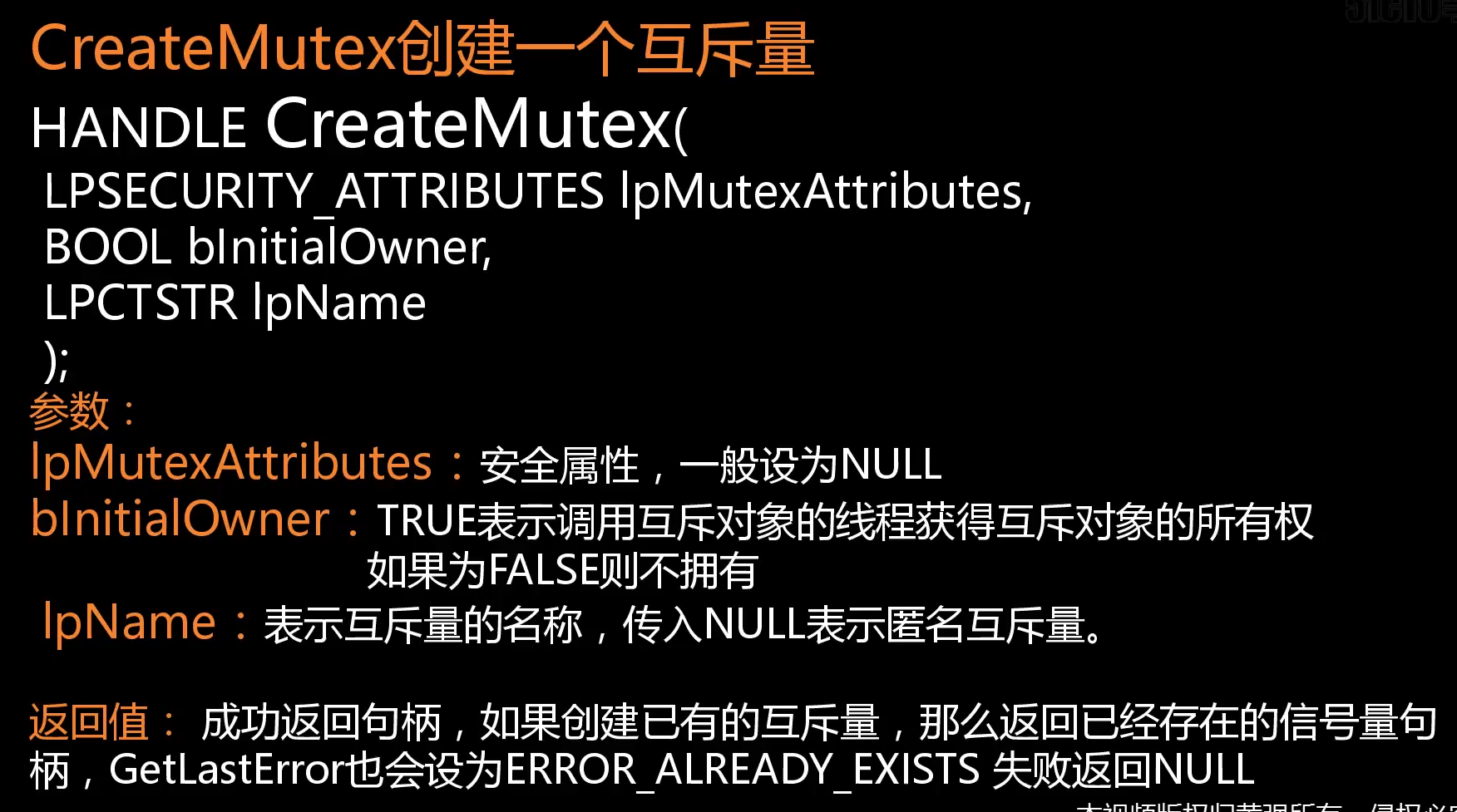
bInitialOwner:指定调用线程是否在互斥对象的初始状态下获得所有权。如果这个值为 TRUE,调用线程在互斥对象创建成功后立即获得所有权;否则,互斥对象的初始状态为非信号状态。
(2)获得互斥量

(3)释放互斥量
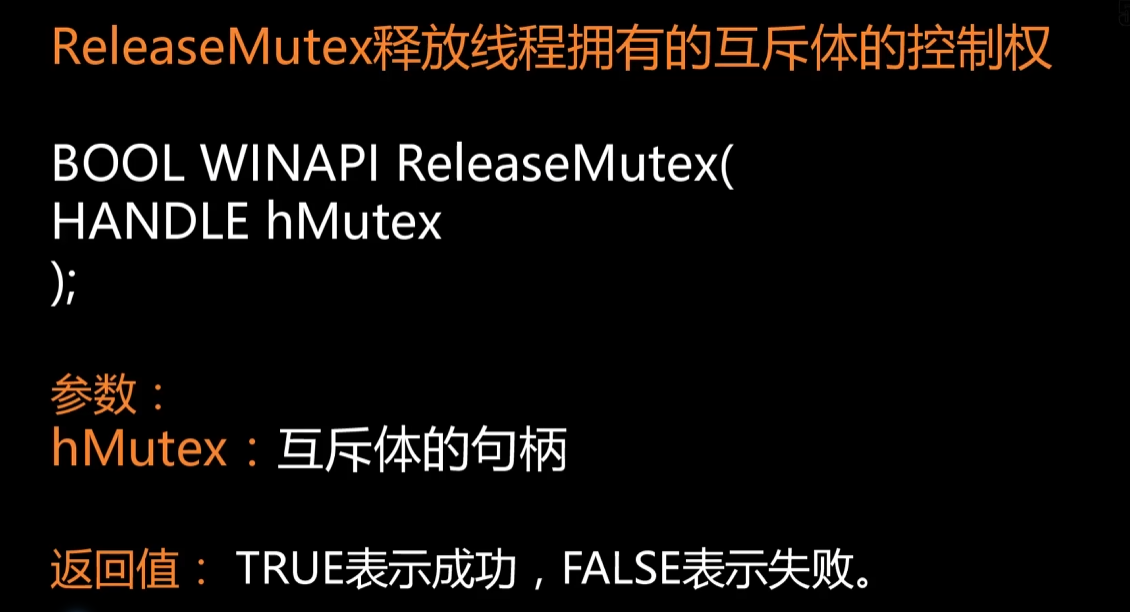
示例

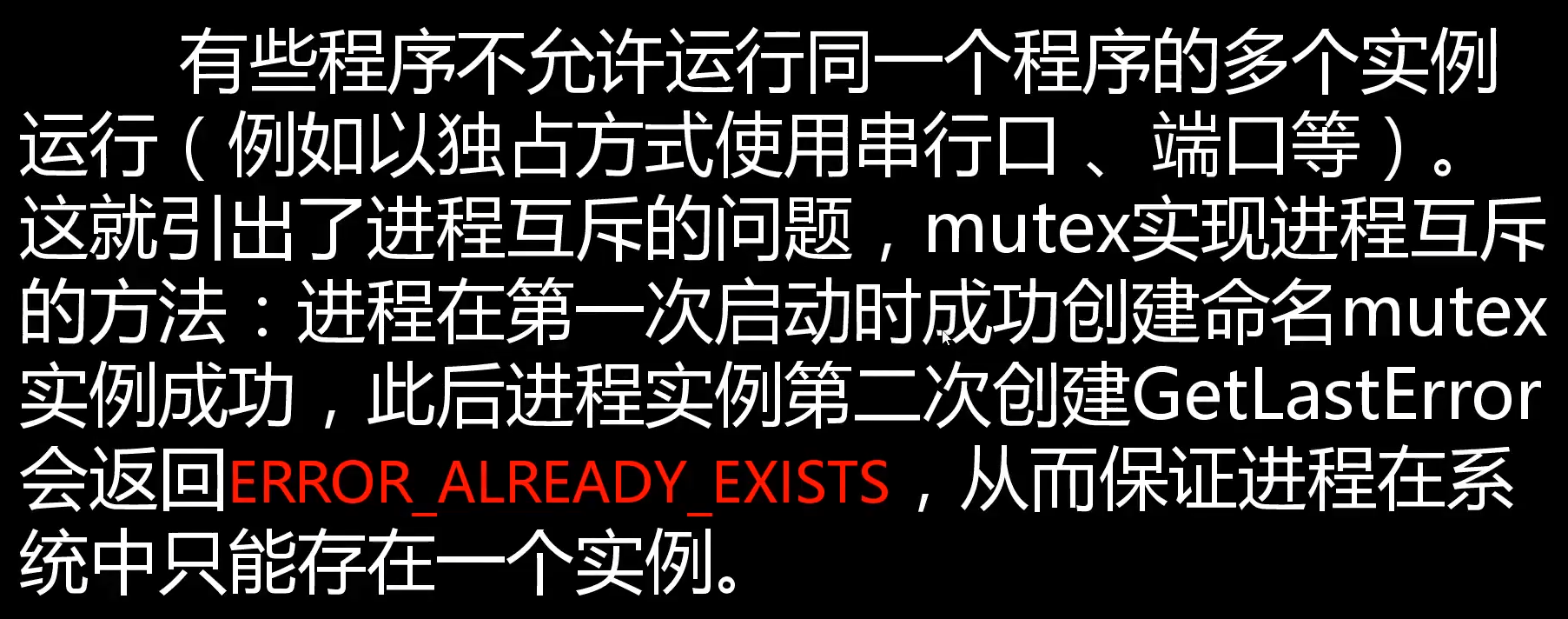
利用互斥量实现进程只有一个实例
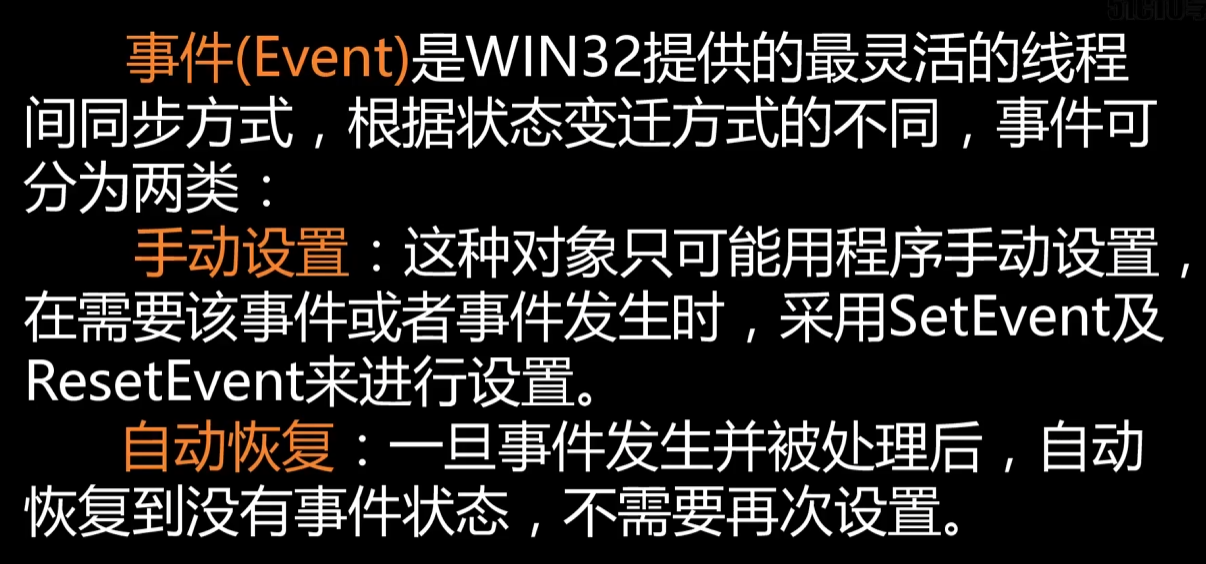
5.事件Event
有信号状态和无信号状态
在 Windows 操作系统中,事件对象用于线程同步,其状态可以是“有信号”(signaled)或“无信号”(nonsignaled)。这两种状态用于控制线程的执行,具体如下:
- 当事件对象处于有信号状态时,所有等待该事件的线程都将被解除阻塞,并继续执行。这意味着事件发生了,等待的线程可以继续进行它们的工作。
- 当事件对象处于无信号状态时,所有等待该事件的线程都将被阻塞,直到事件对象的状态变为有信号。这意味着事件尚未发生,等待的线程需要等待,直到事件发生。
事件对象可以分为两种类型:自动重置事件(auto-reset event)和手动重置事件(manual-reset event)。这两种类型的事件对象在状态变更和重置机制上有所不同。
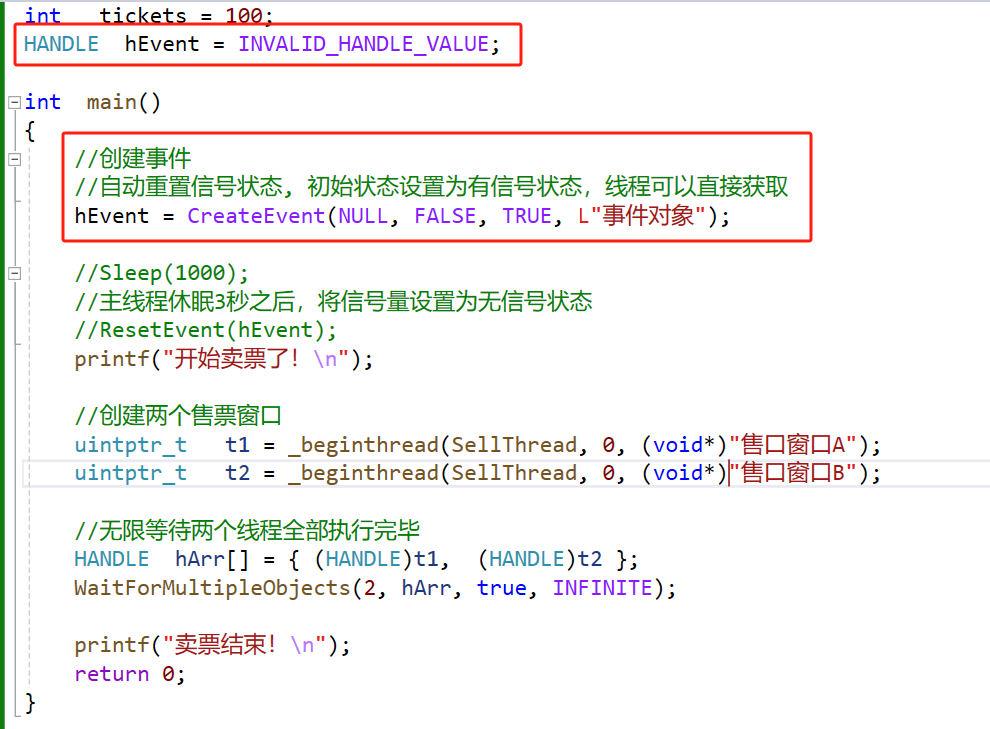
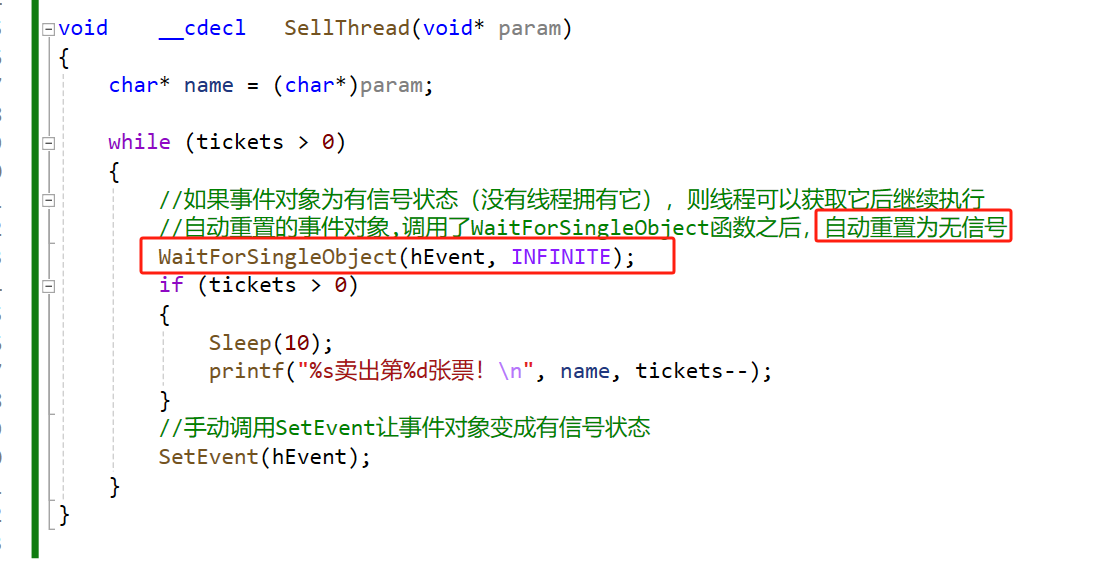
- 当事件对象处于有信号状态时,等待的线程将被解除阻塞,然后事件对象自动重置为无信号状态。如果有多个线程在等待事件,只有一个线程会被解除阻塞。
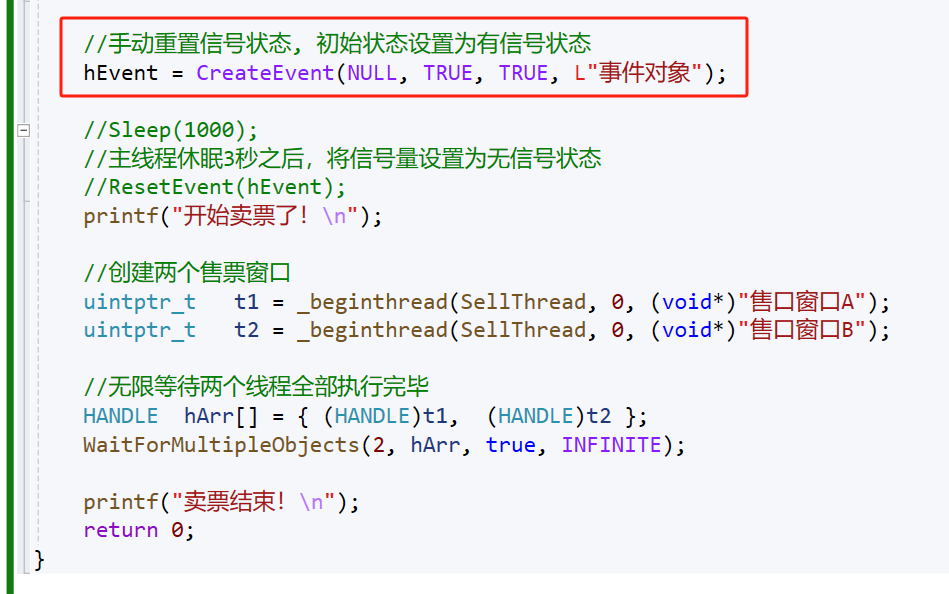
- 当事件对象处于有信号状态时,所有等待的线程将被解除阻塞,并且事件对象保持有信号状态,直到显式调用
ResetEvent函数将其状态重置为无信号状态。
相关API
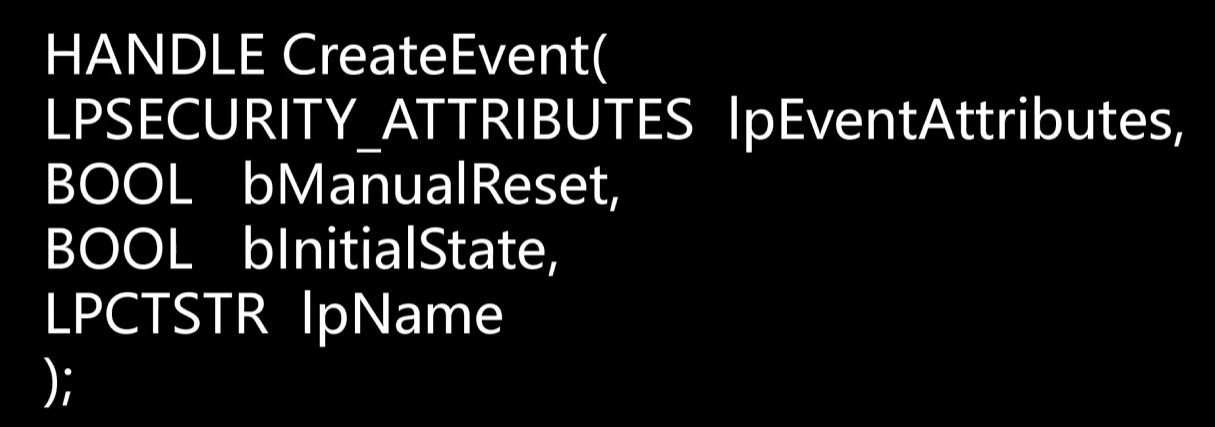
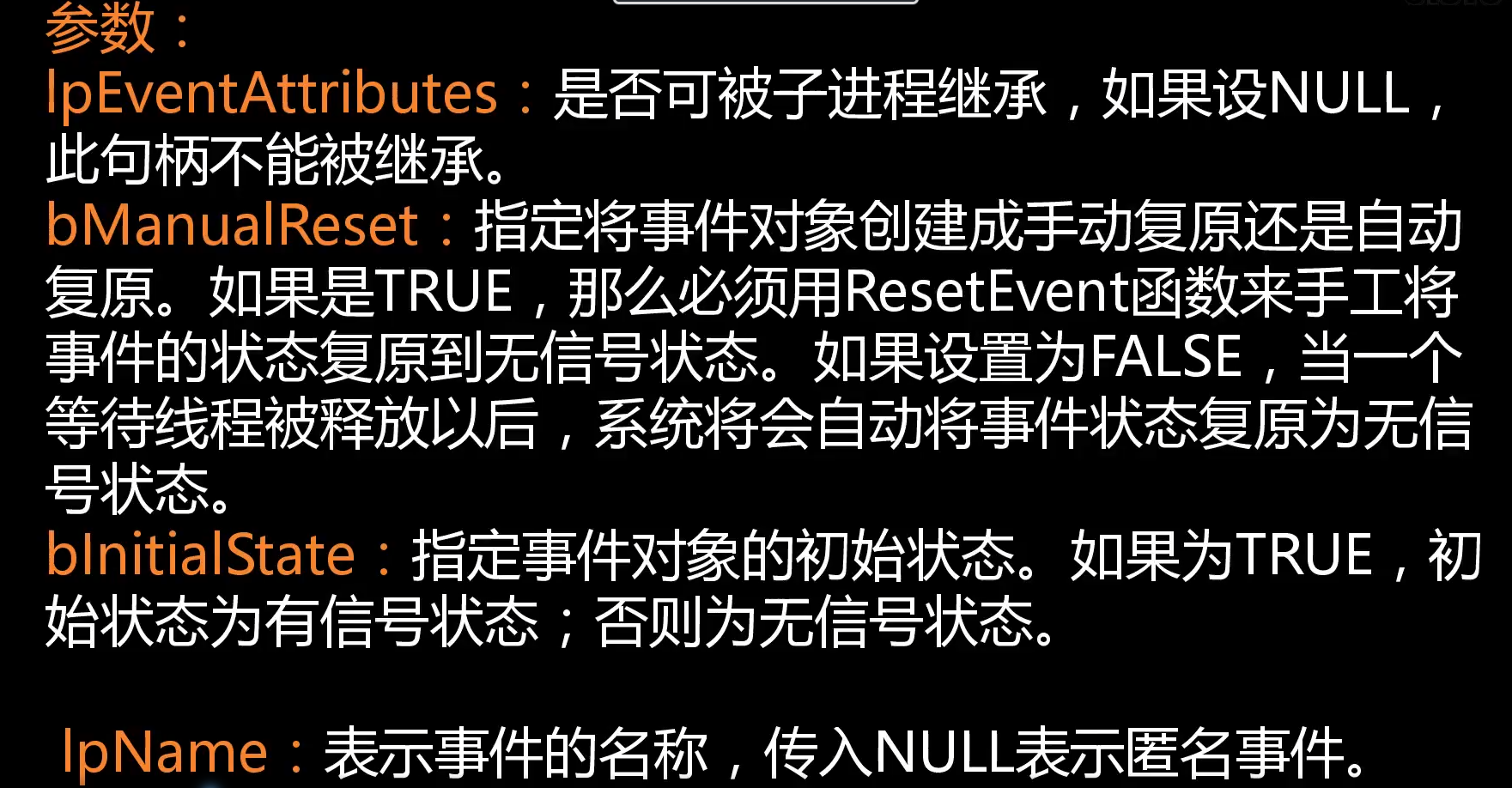
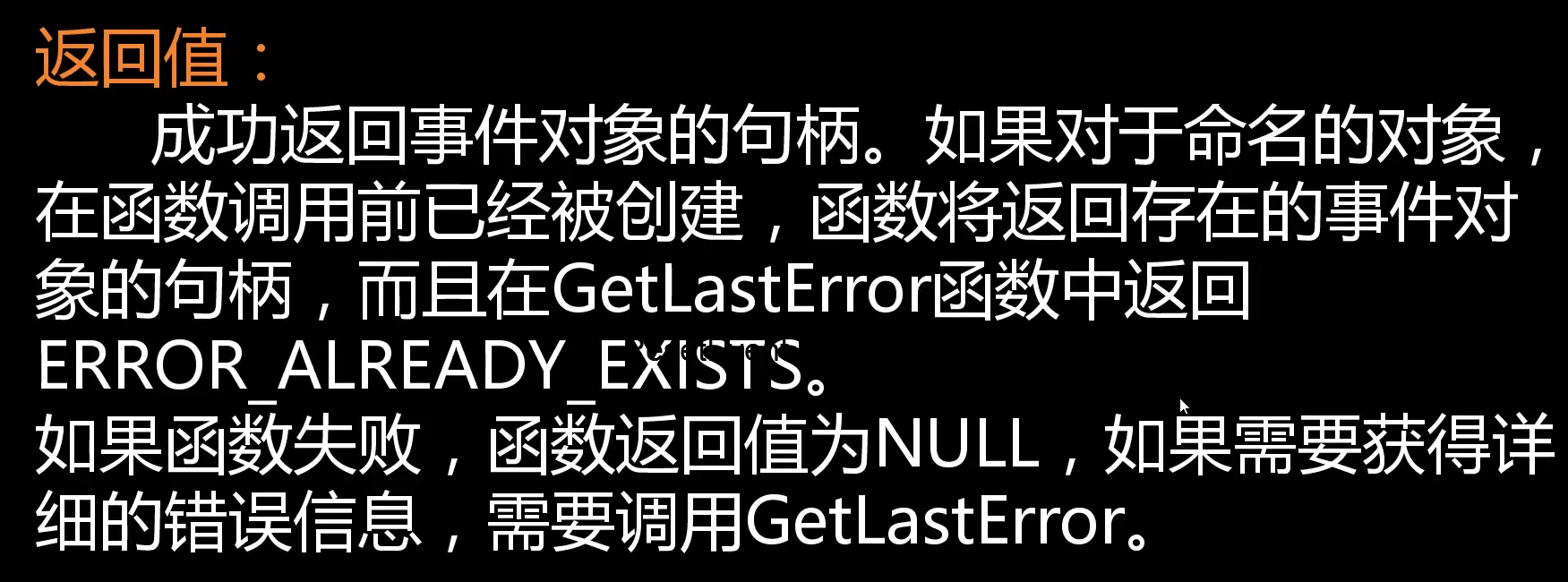
(1)创建事件
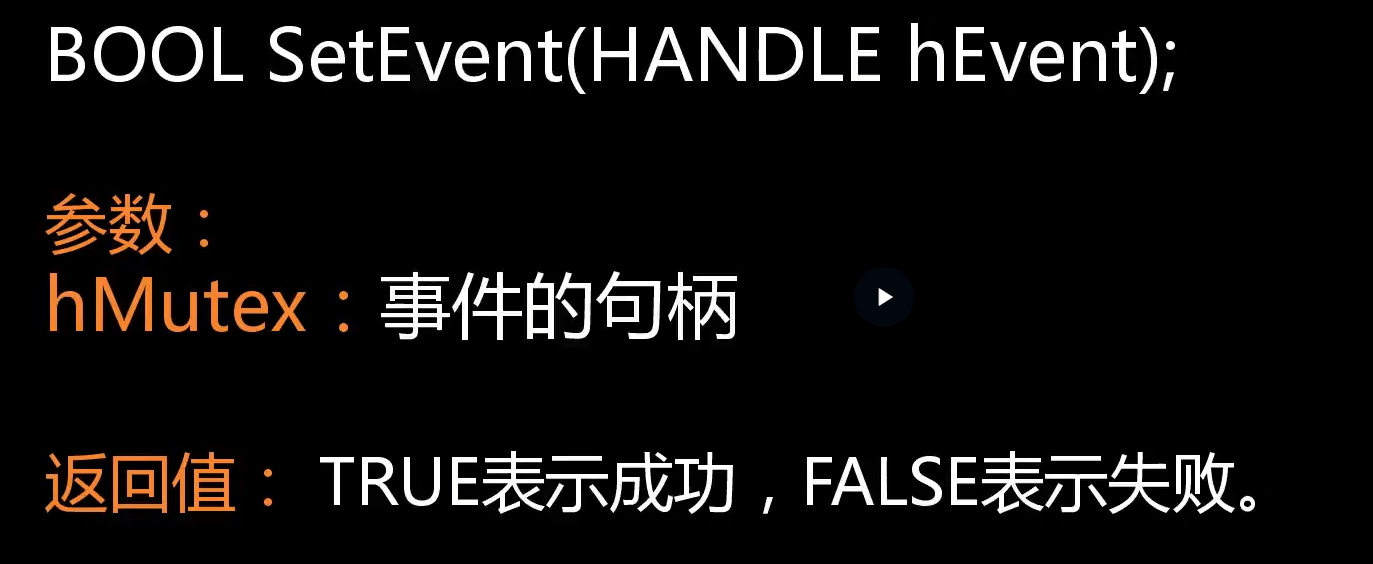
(2)把指定的事件对象设置为有信号状态
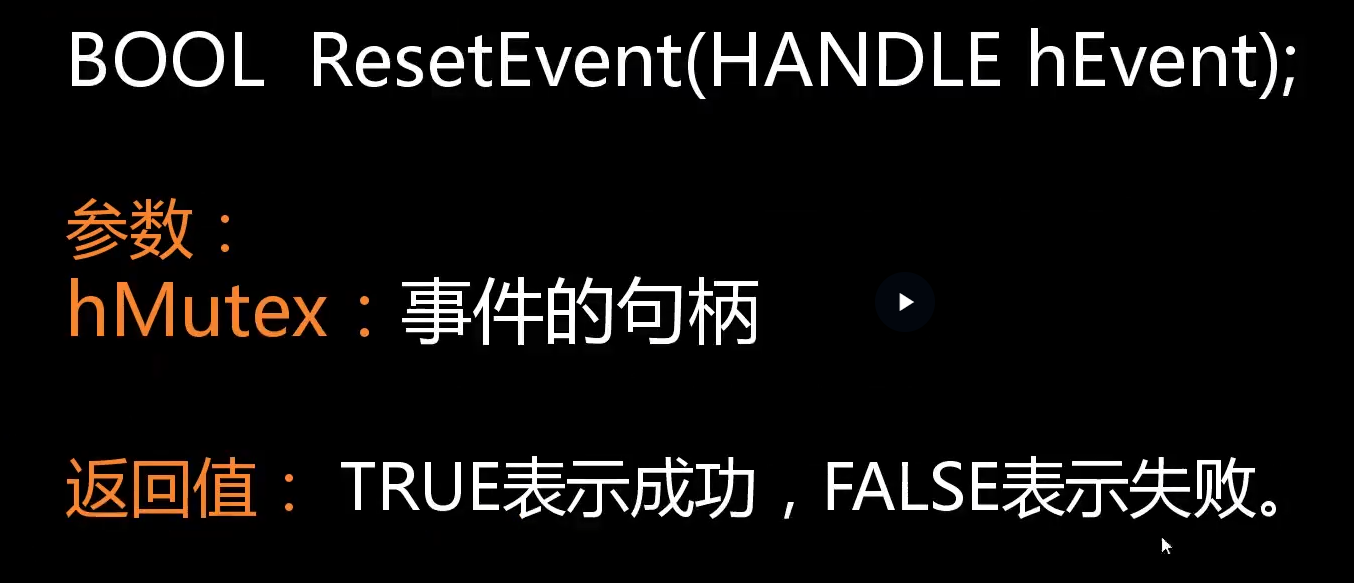
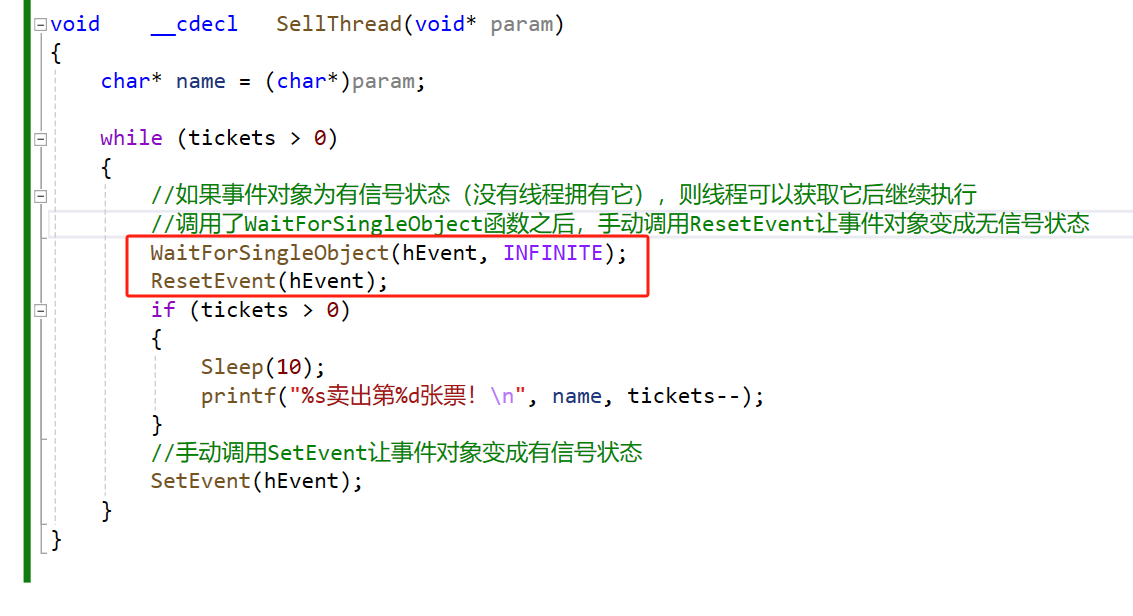
(3)把指定的事件对象设置为无信号状态
(4)等待事件对象的句柄

自动重置事件
手动重置事件
实现进程只有一个实例
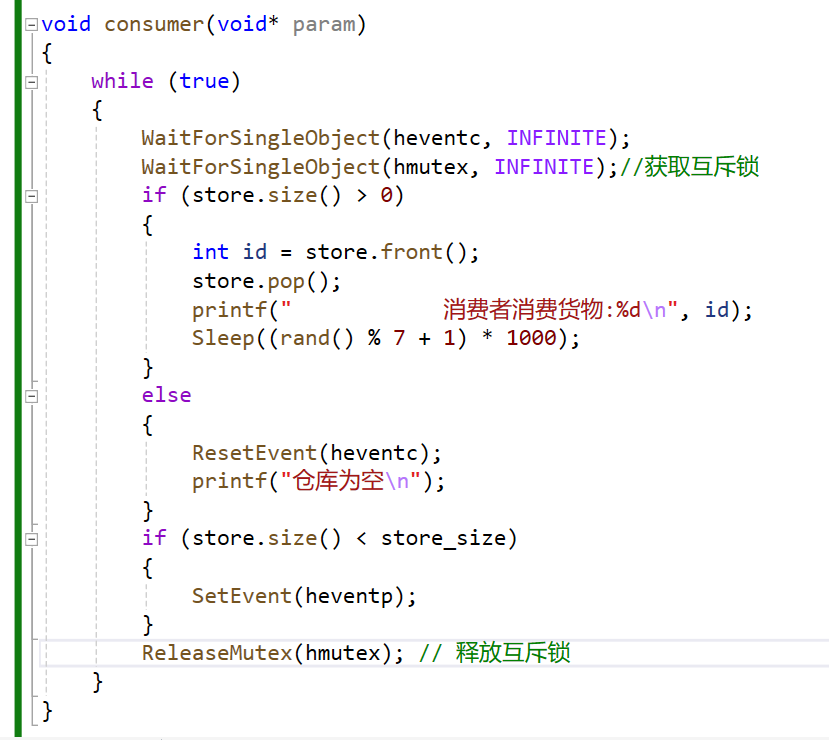
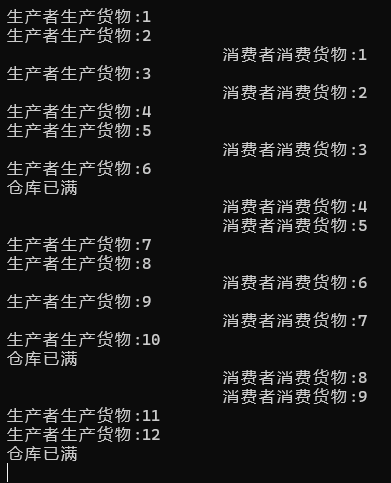
6.PV操作
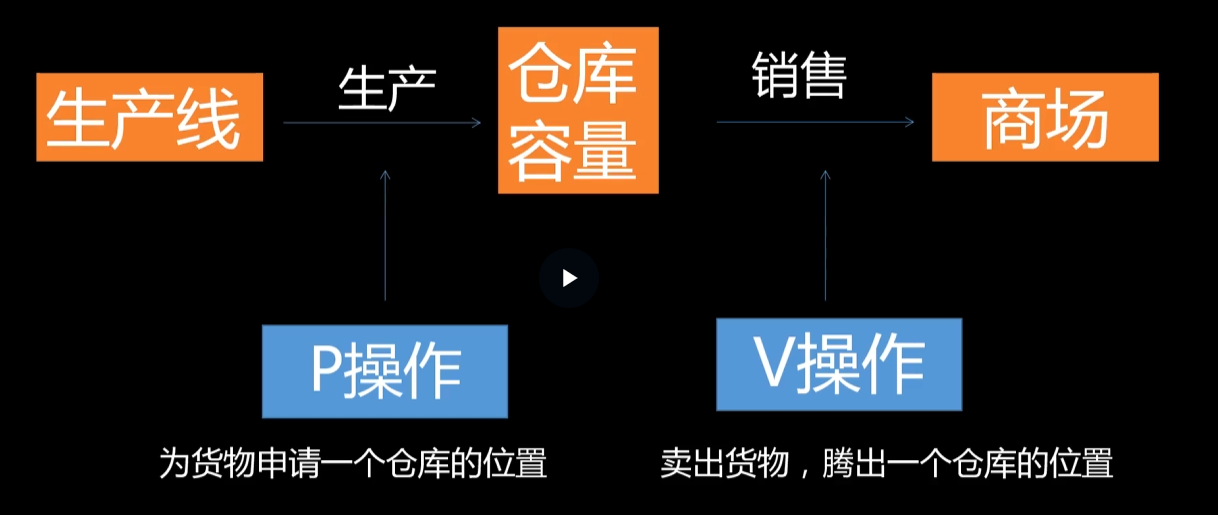
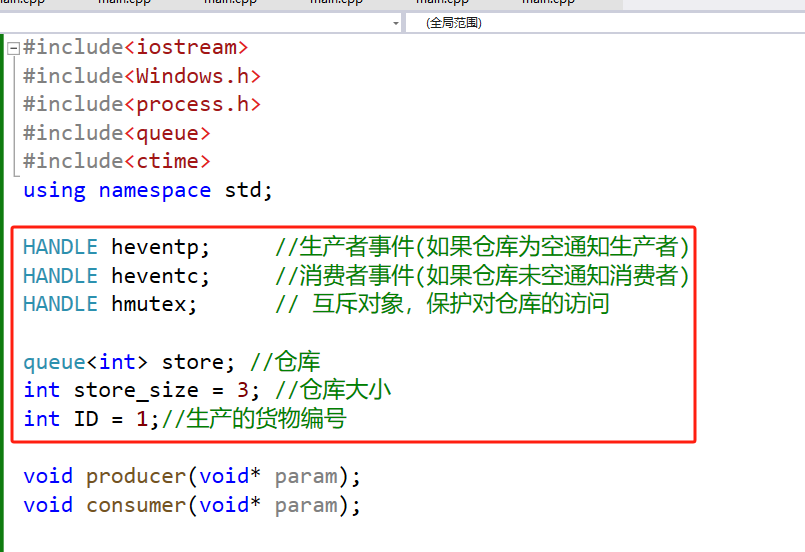
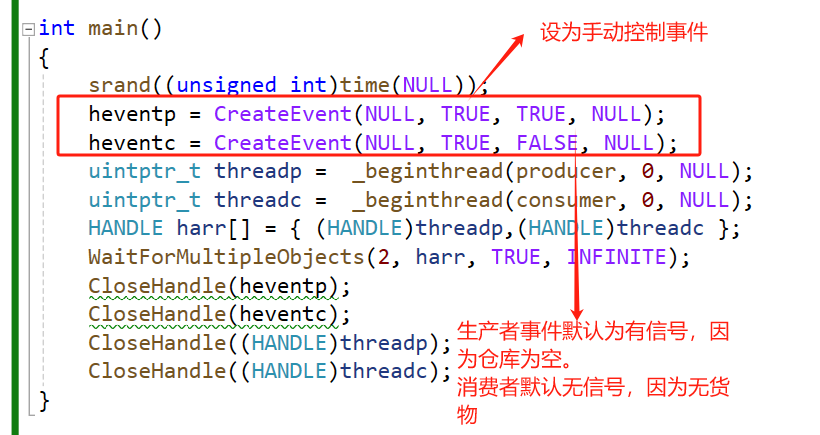
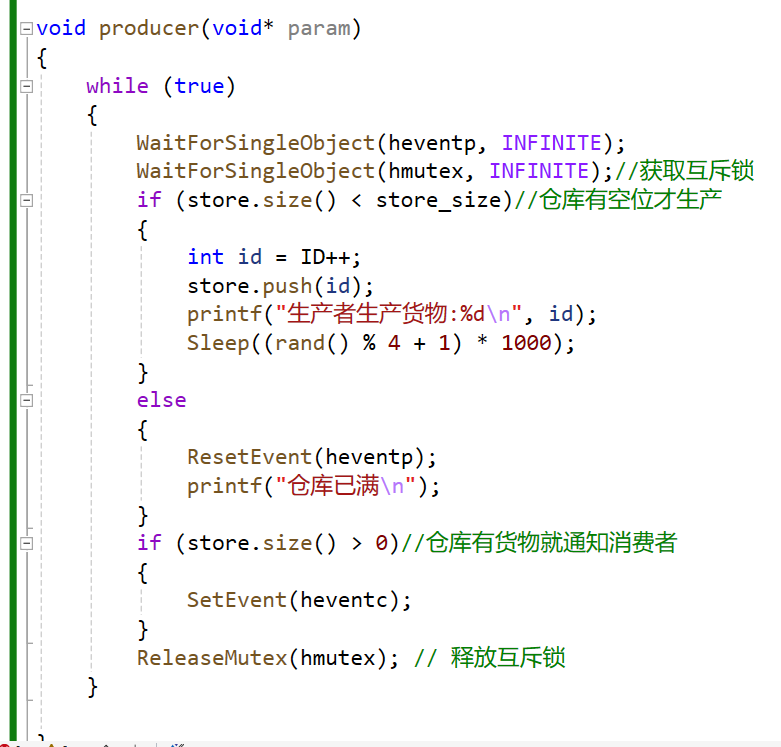
生产者消费者问题
7.总结
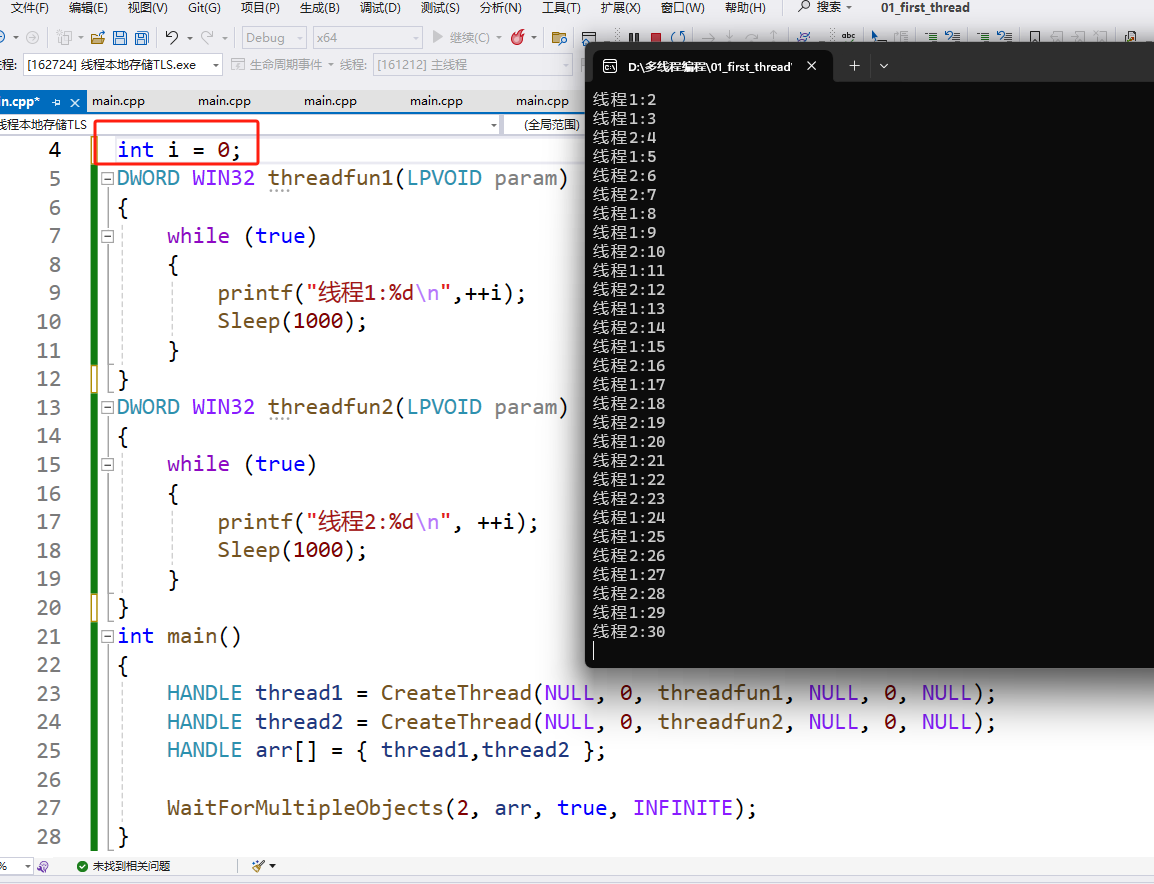
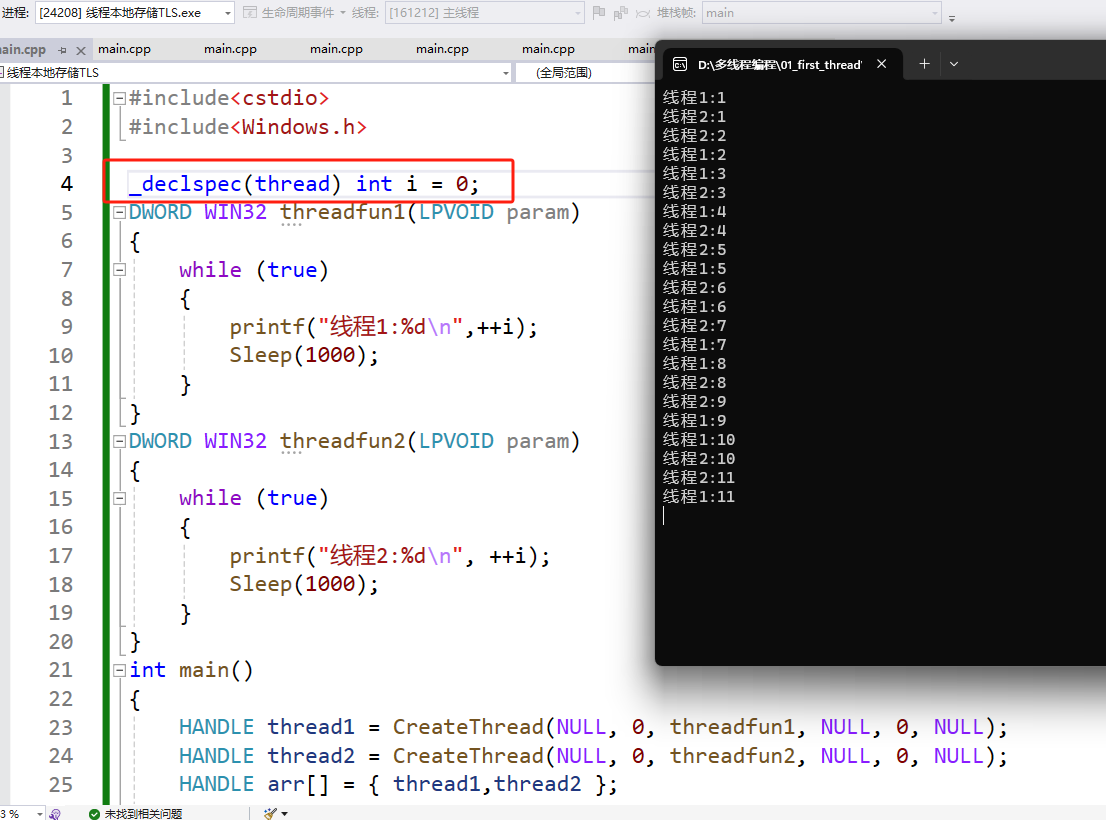
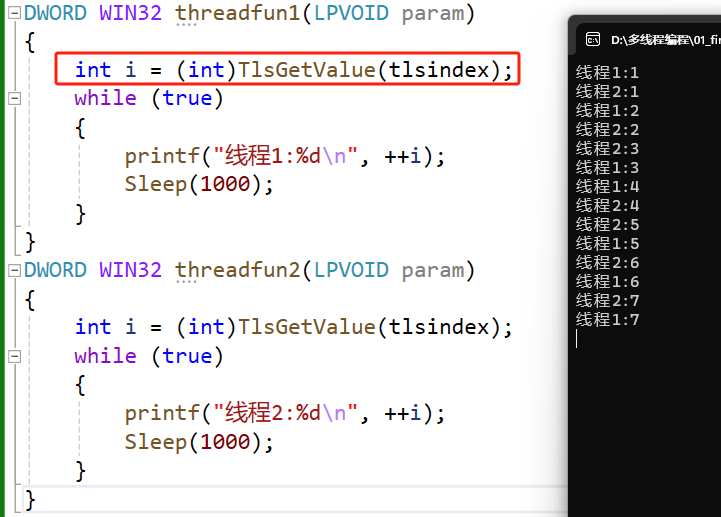
五、线程本地存储
1.静态TLS
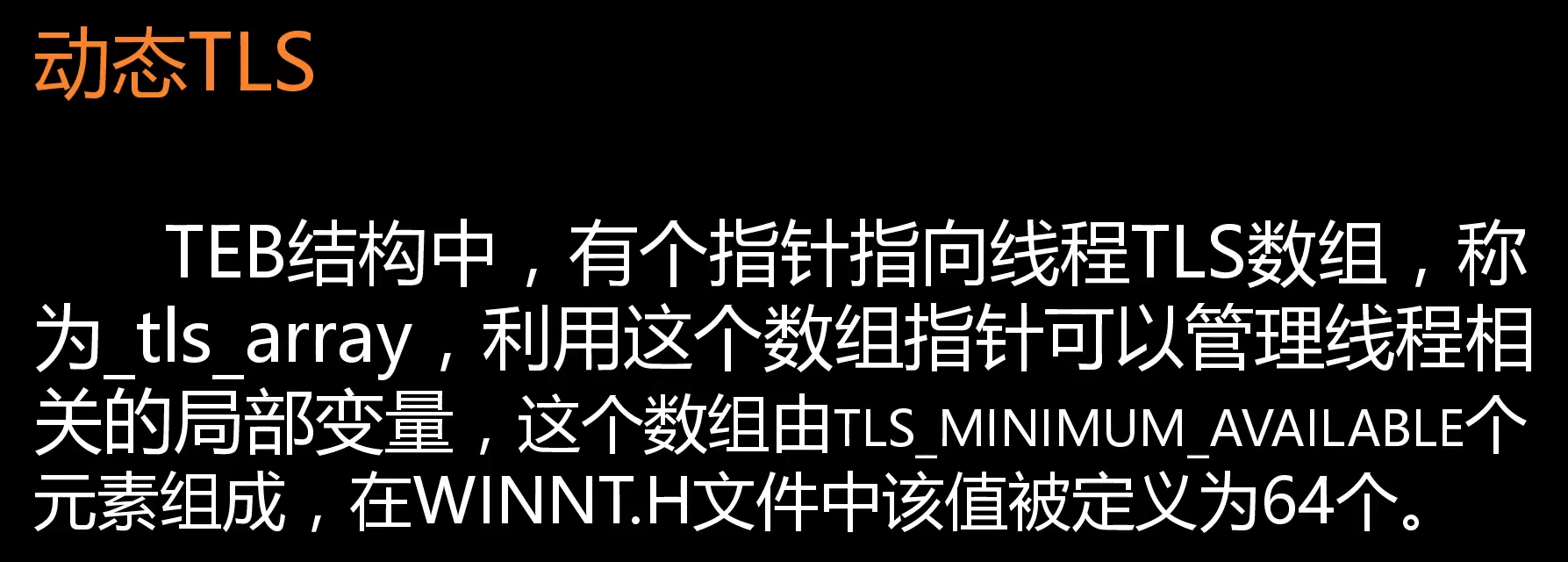
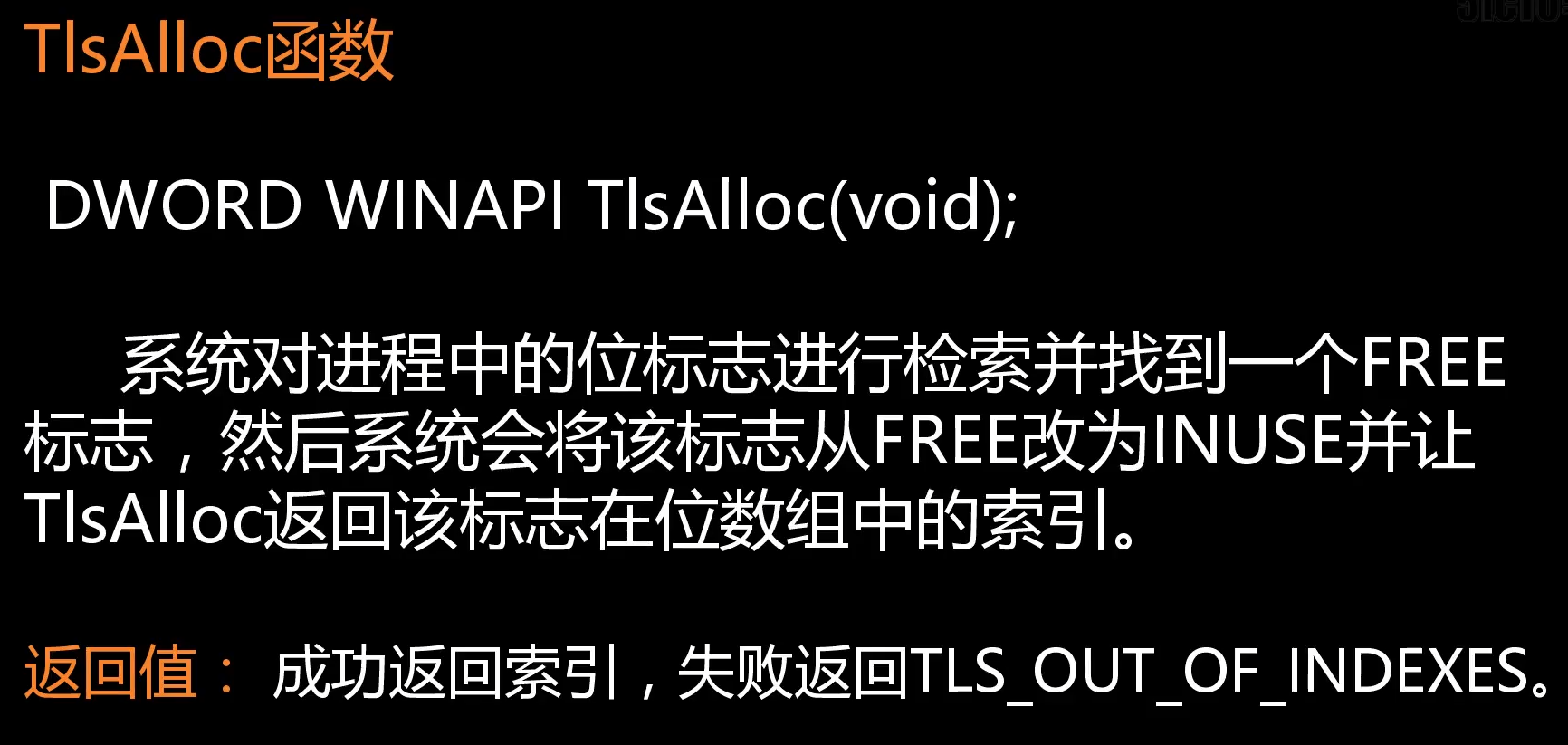
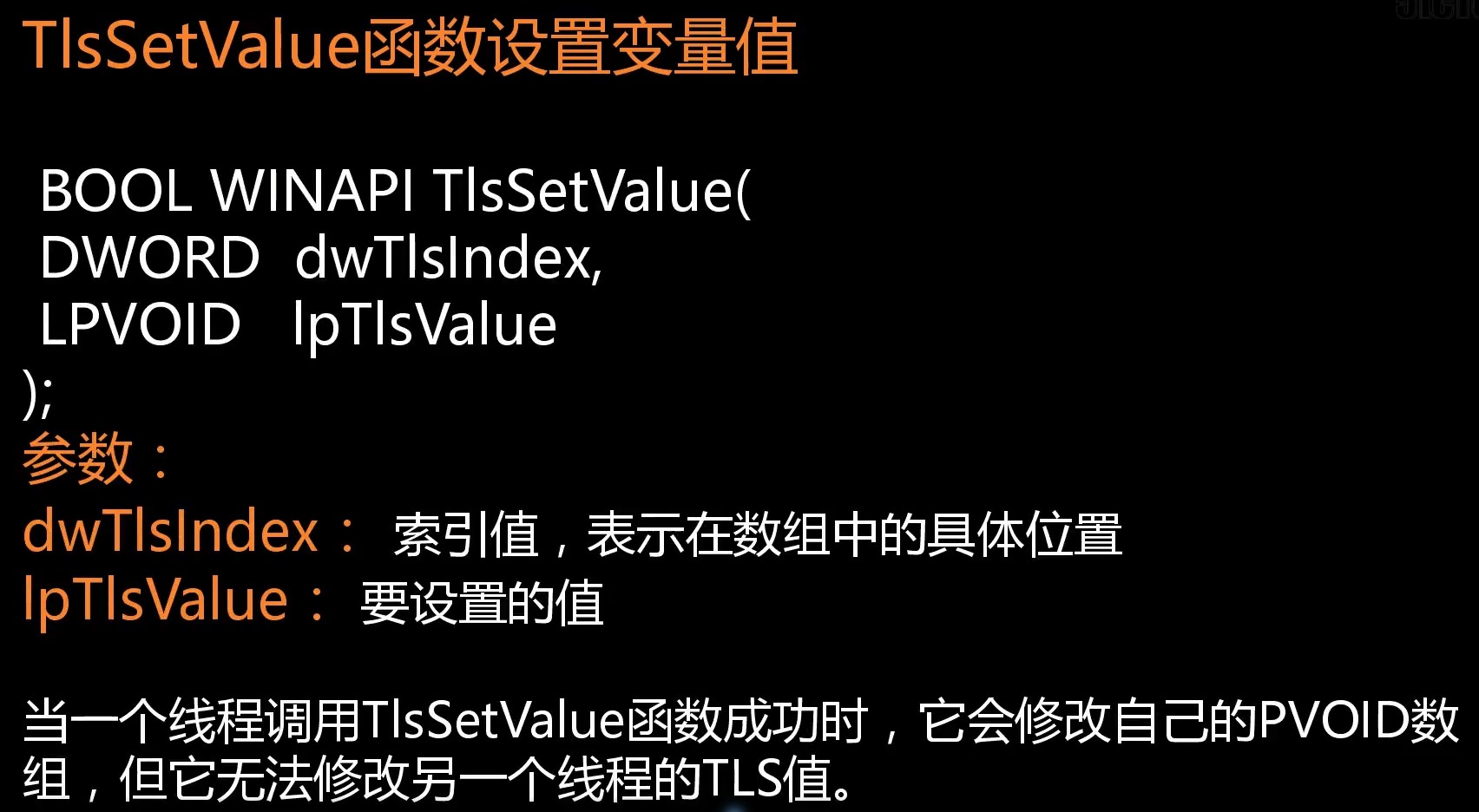
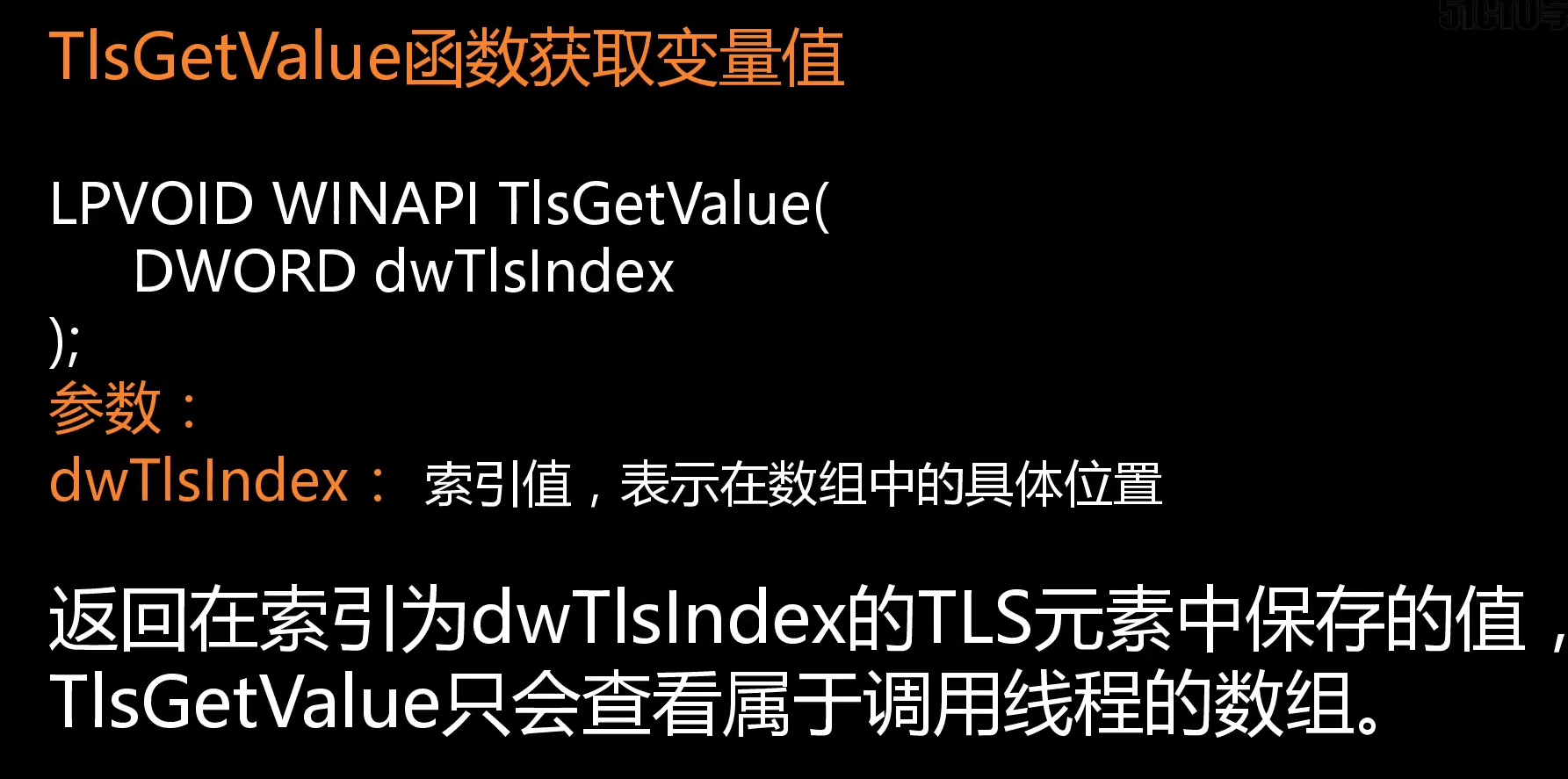
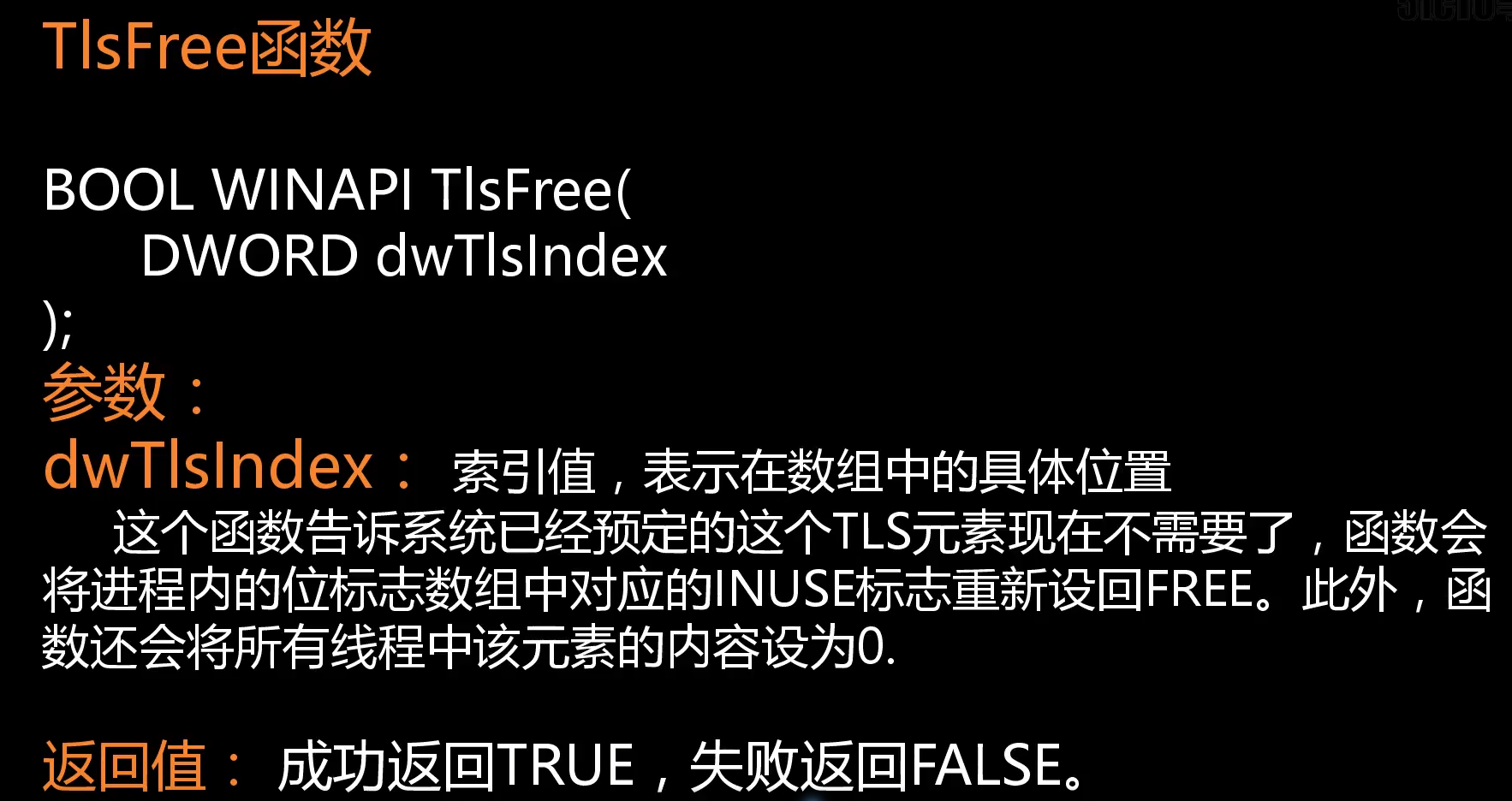
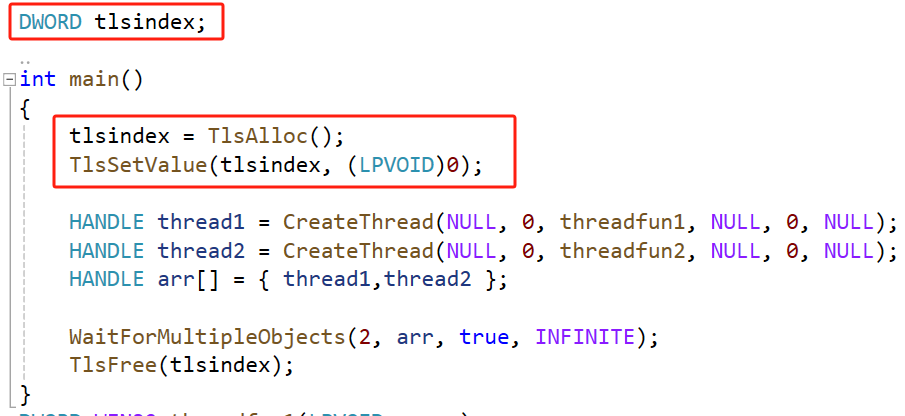
2.动态TLS
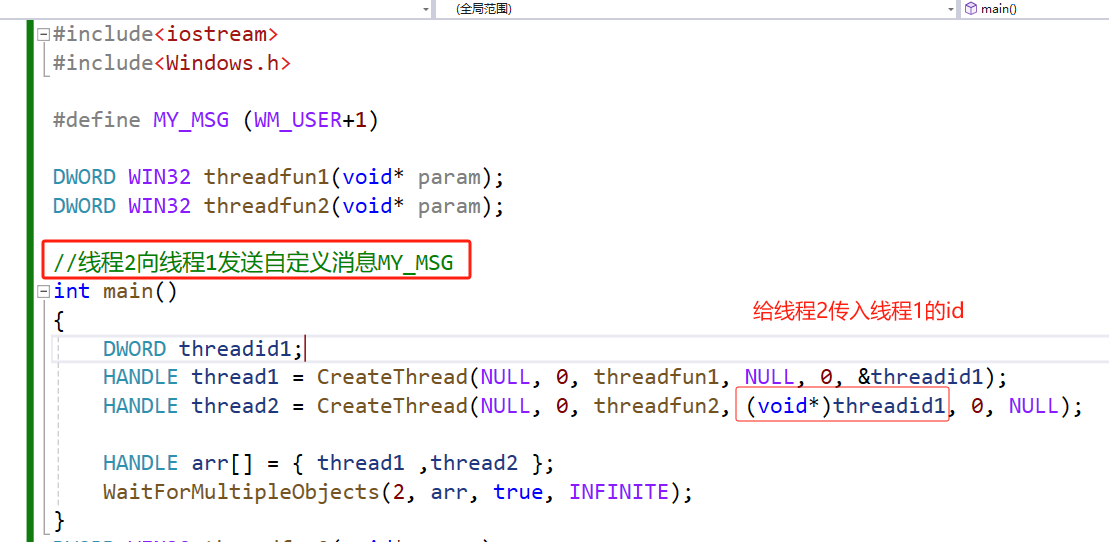
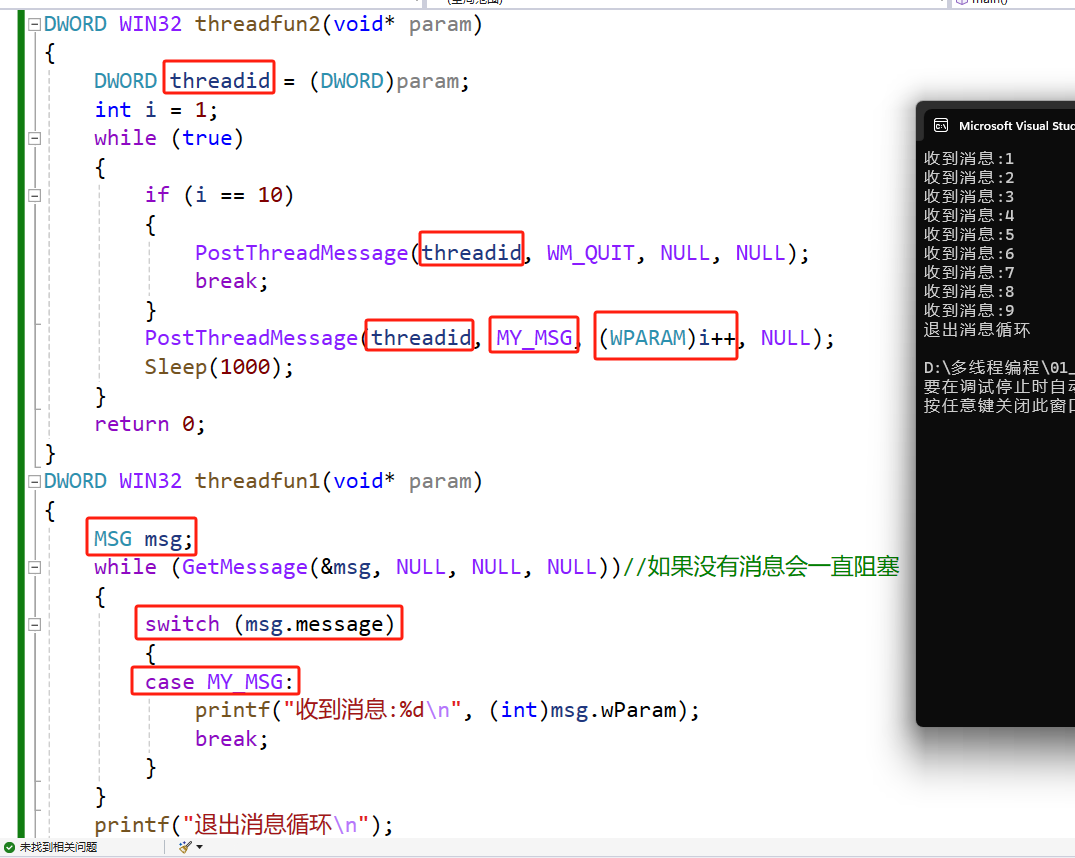
六、多线程间的消息通讯

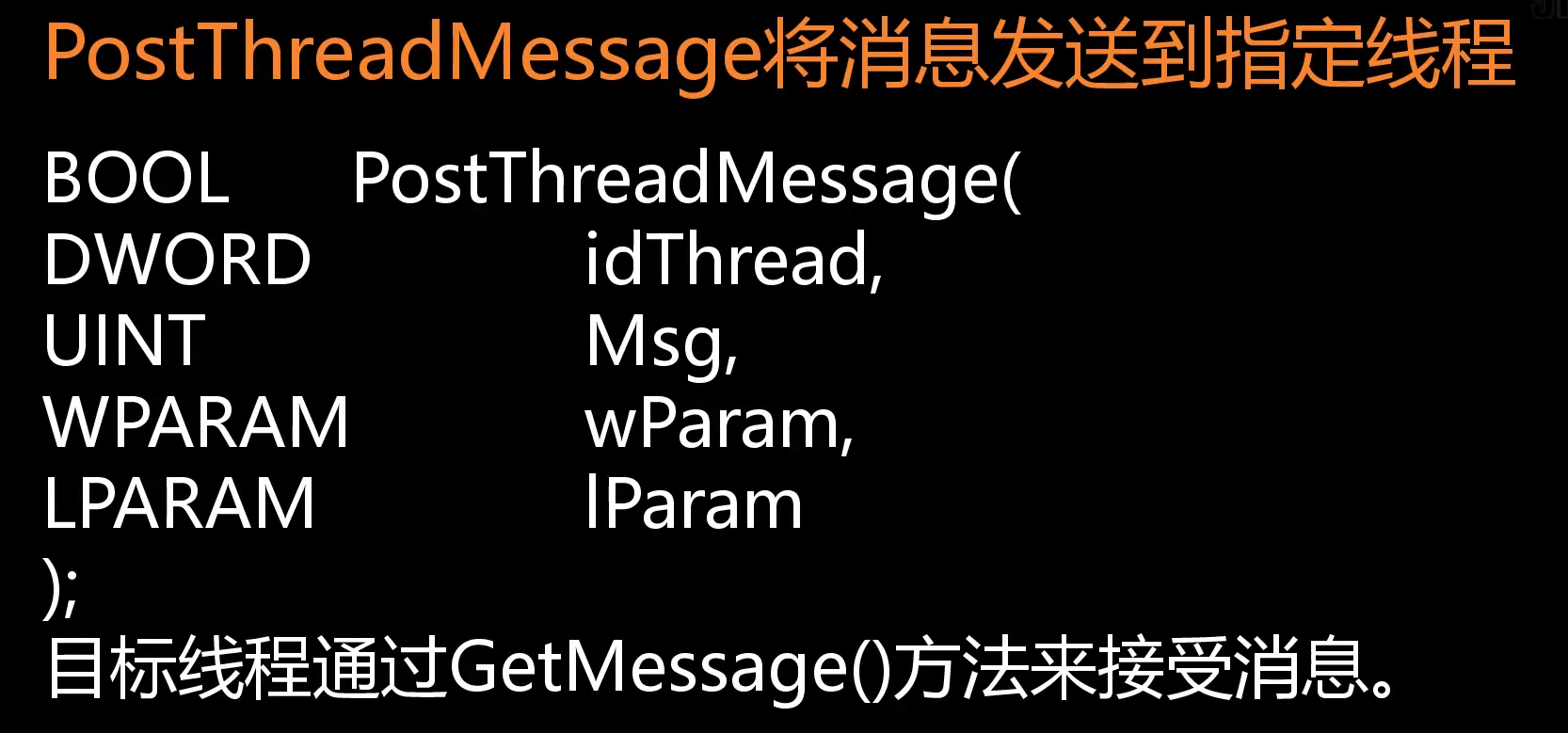
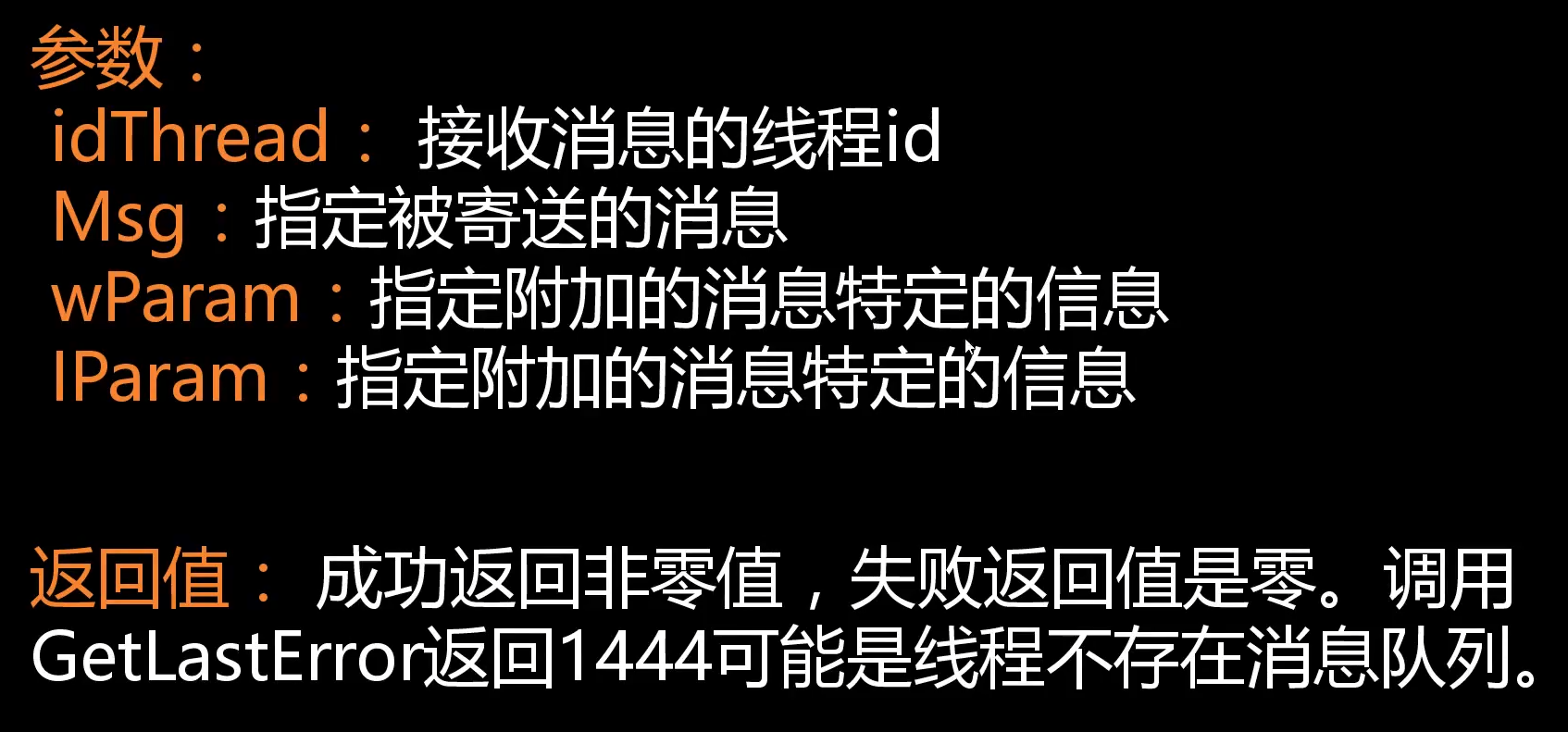

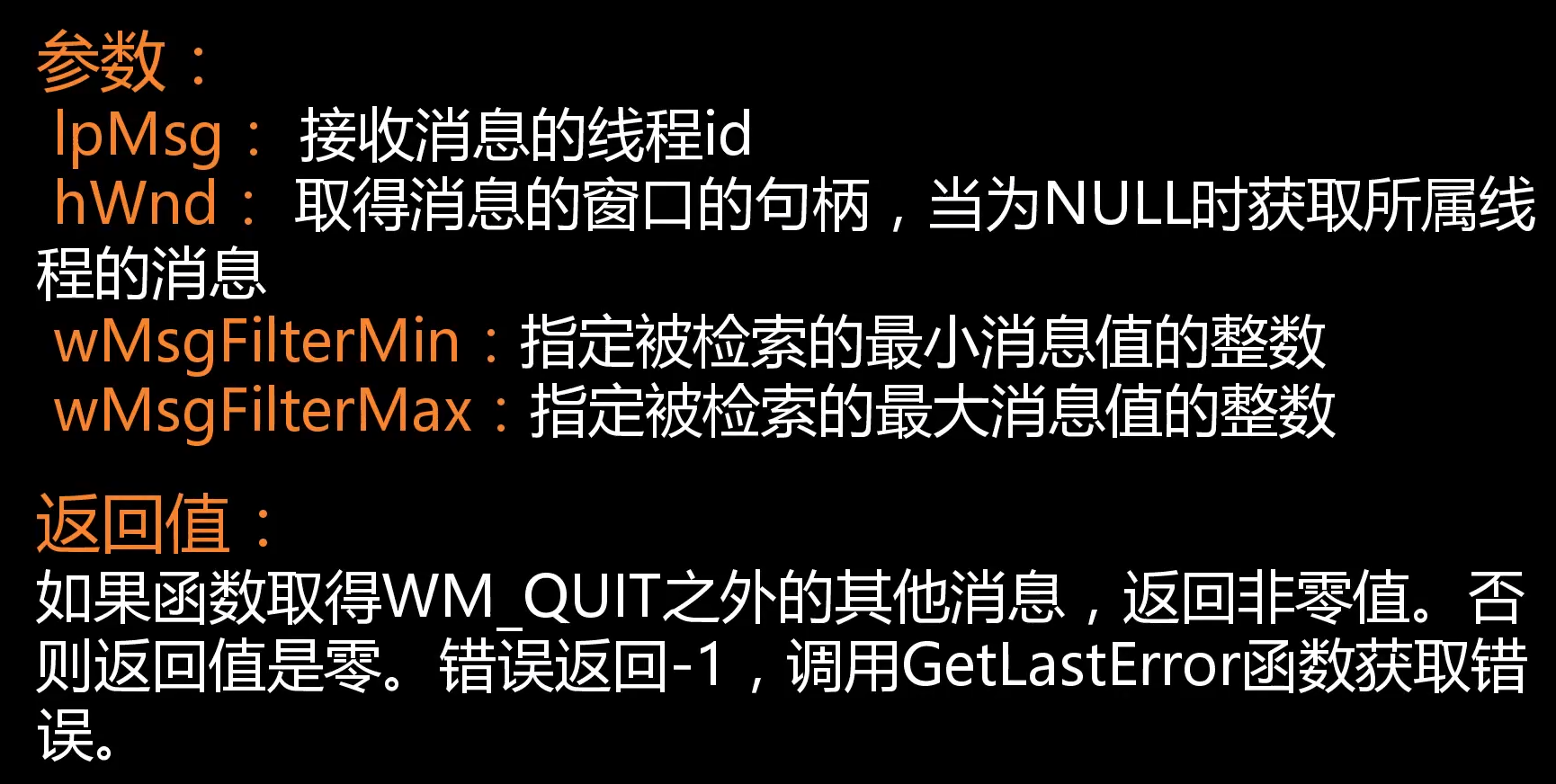
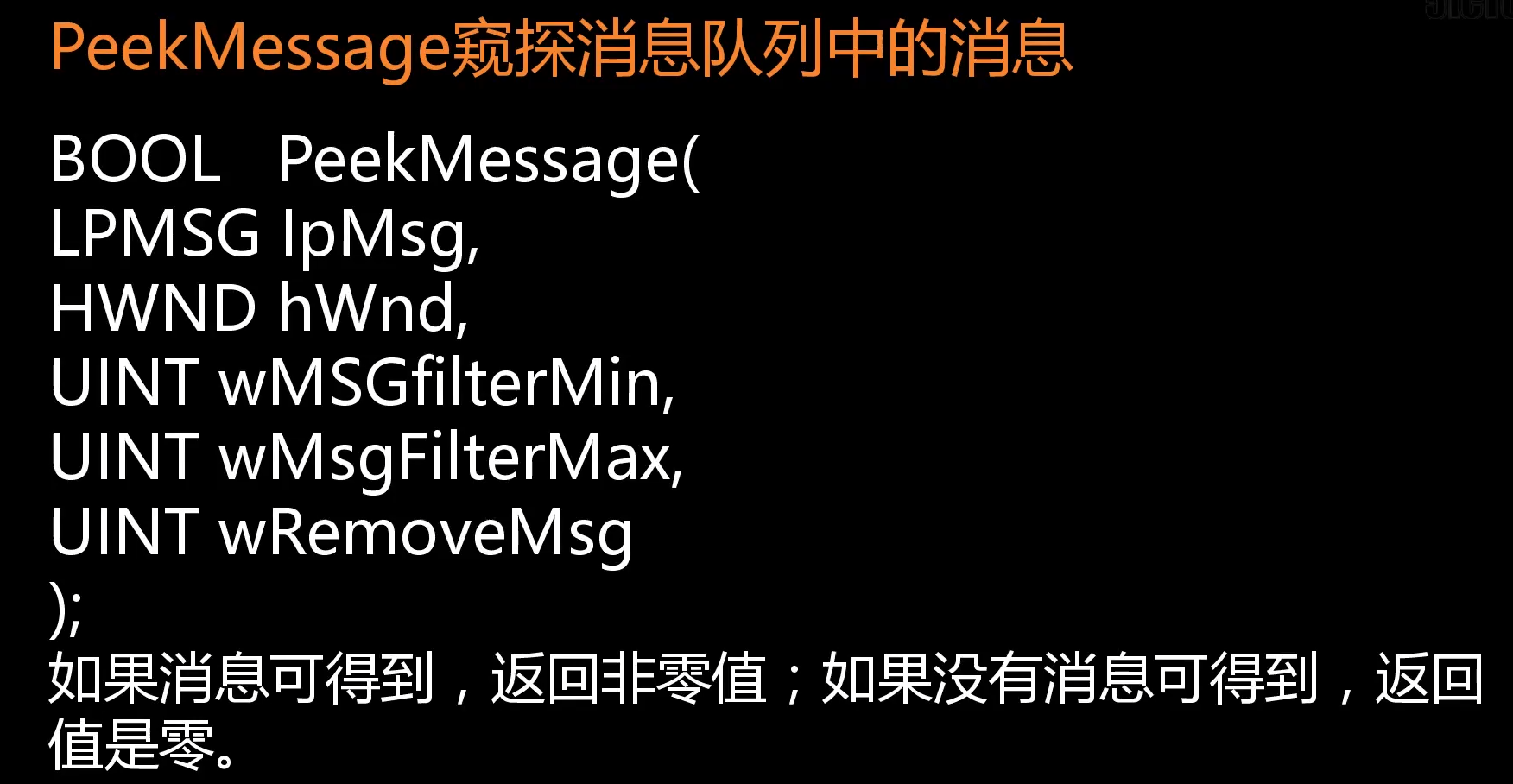
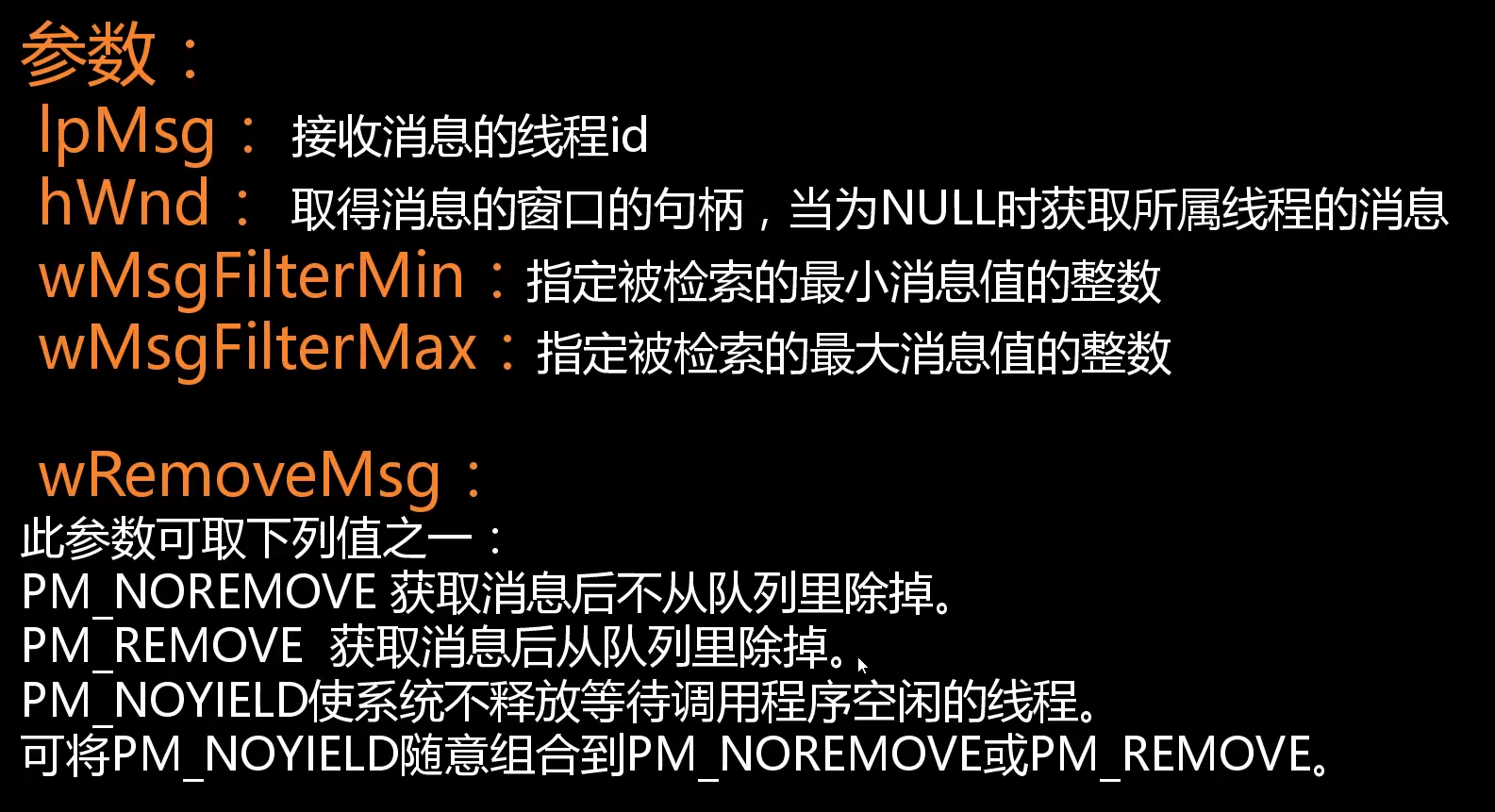
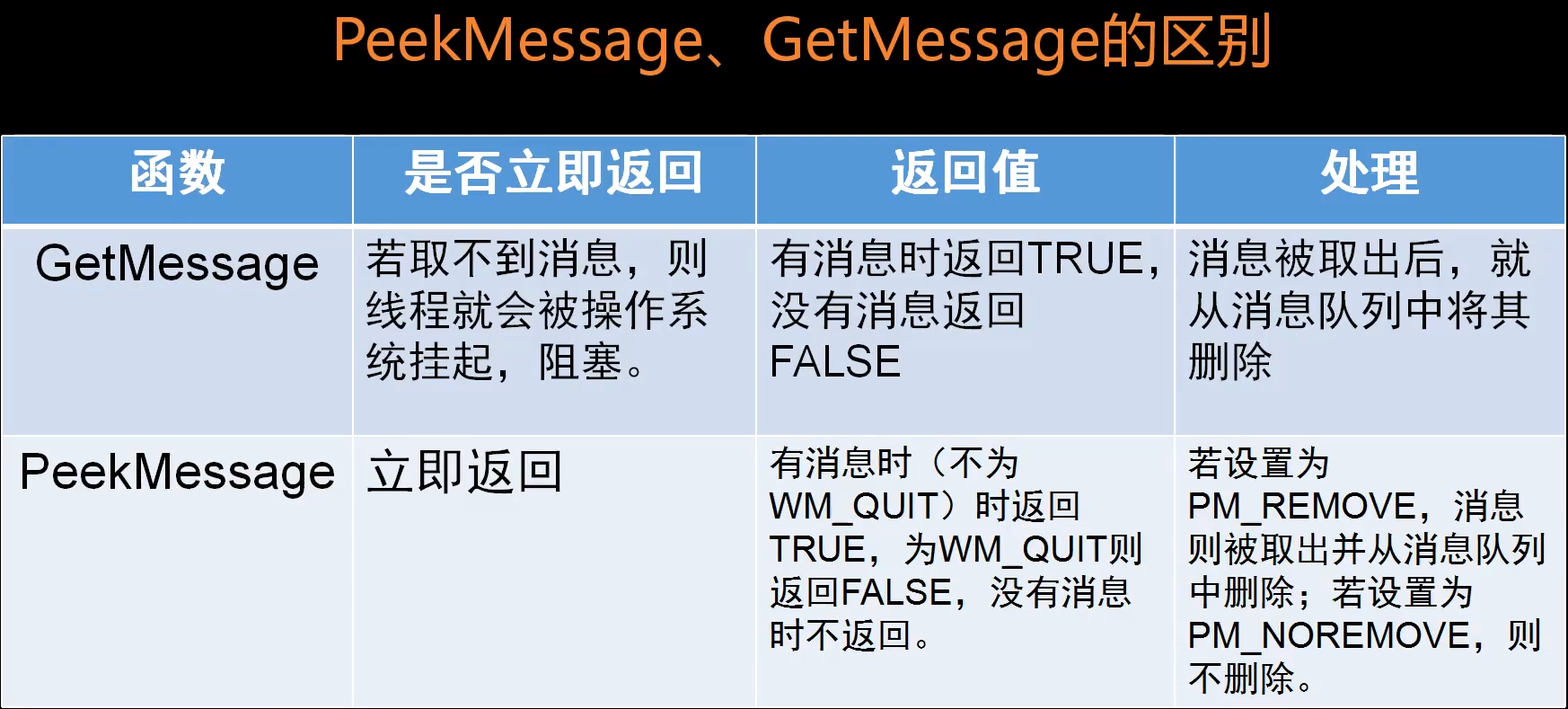
示例:一个线程向另一个线程发送消息
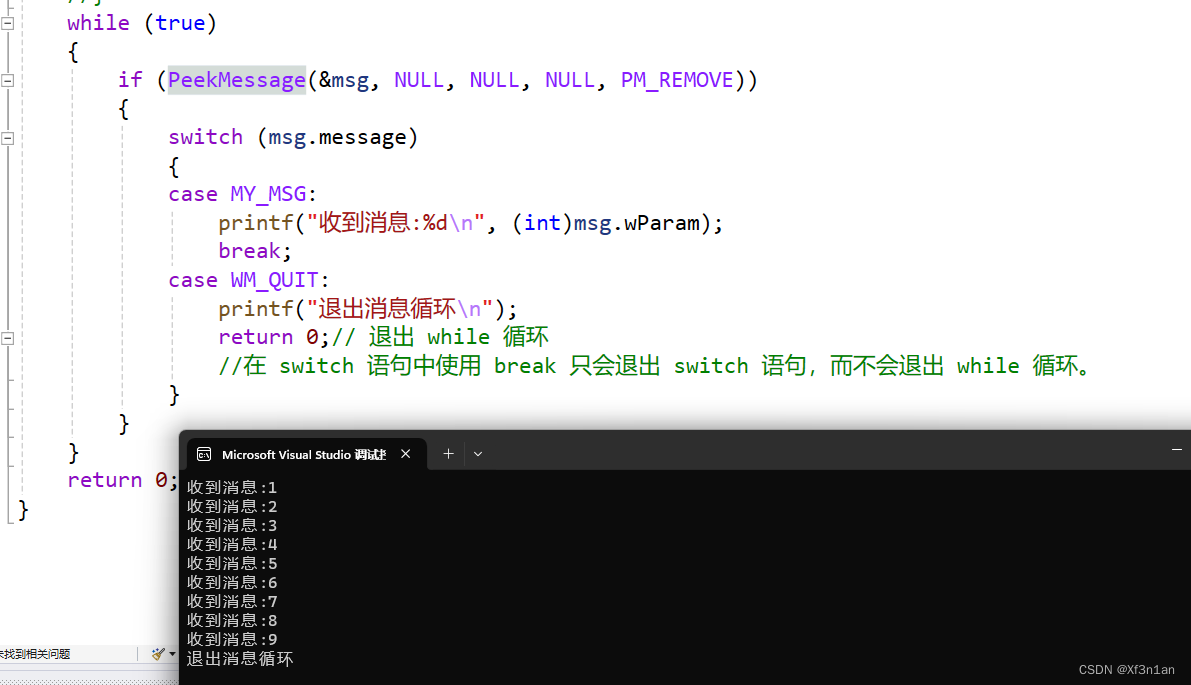
使用PeekMessage写法如下:
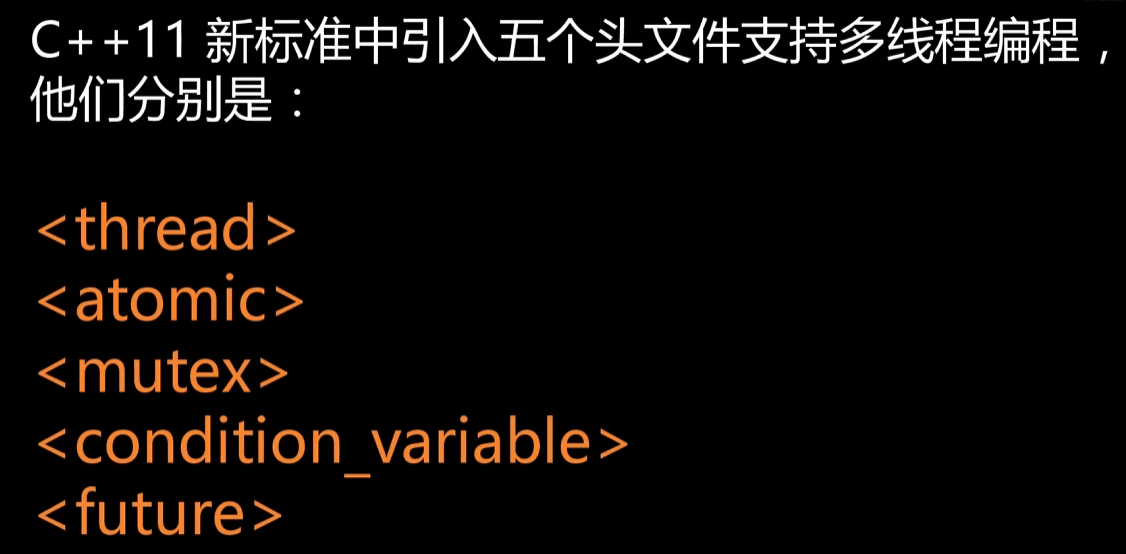
七、C++11多线程(同步)
1.线程类thread
头文件:#include<thread>
C++11 引入了 std::thread 类,使得多线程编程更加类型安全和易用。std::thread 的构造函数允许传递任意类型的参数,并且不需要进行 void* 类型的强制转换。C++11 使用了模板和类型推导机制来实现这一点。
为什么 C++11 的 std::thread 更加类型安全?
- 模板和类型推导:
std::thread使用模板来接受线程函数和参数,因此在编译时可以推导出参数的实际类型。 - 类型安全:由于不需要将参数转换为
void*,因此避免了类型转换错误。参数类型在编译时就得到了确认,增加了类型安全性。 - 可变参数:
std::thread支持传递多个参数,而不仅限于一个void*指针。
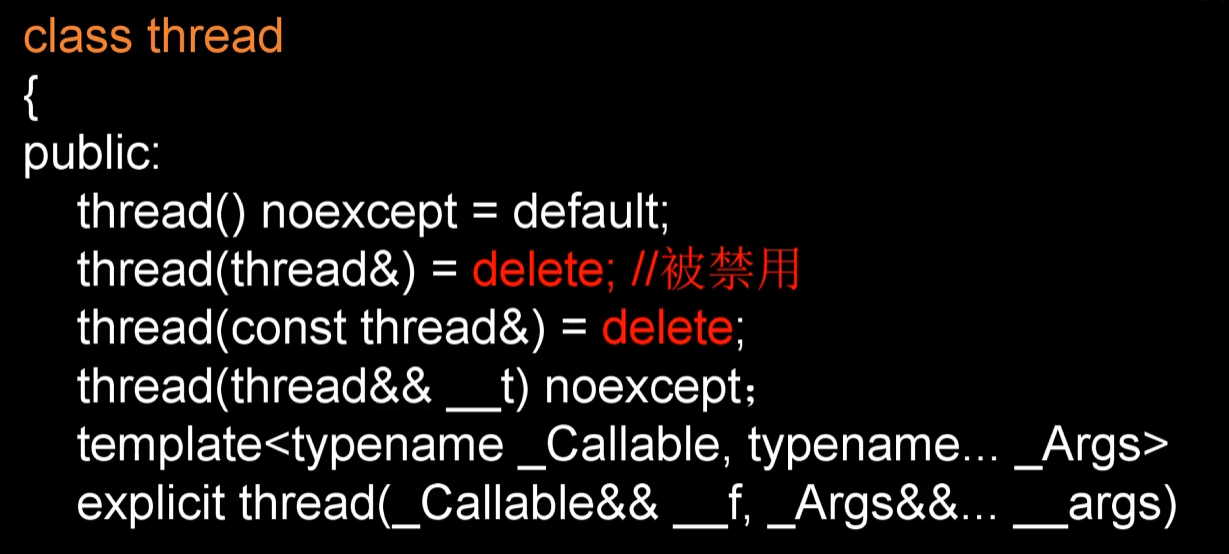
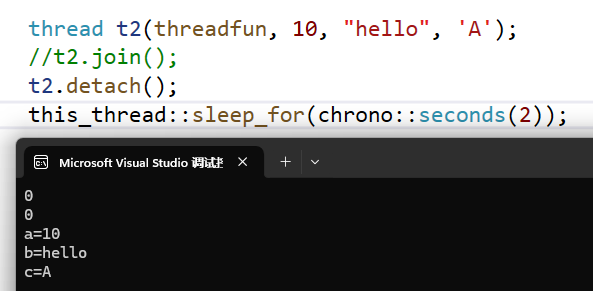
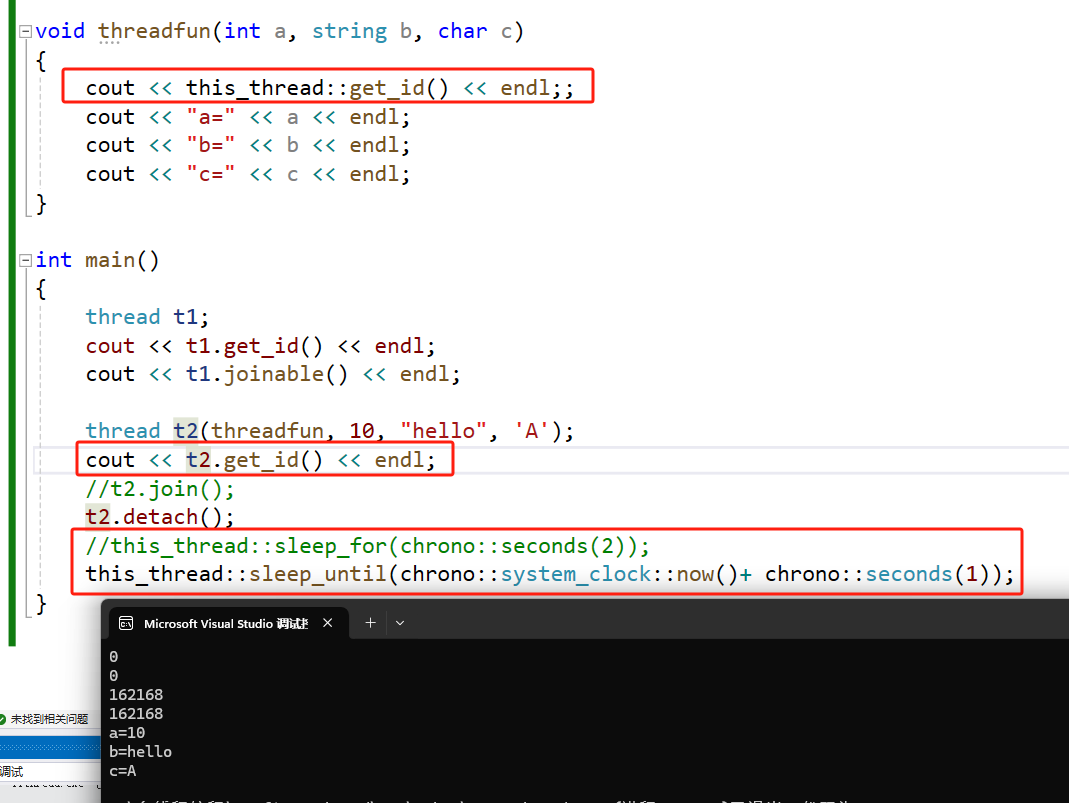
- thread构造函数
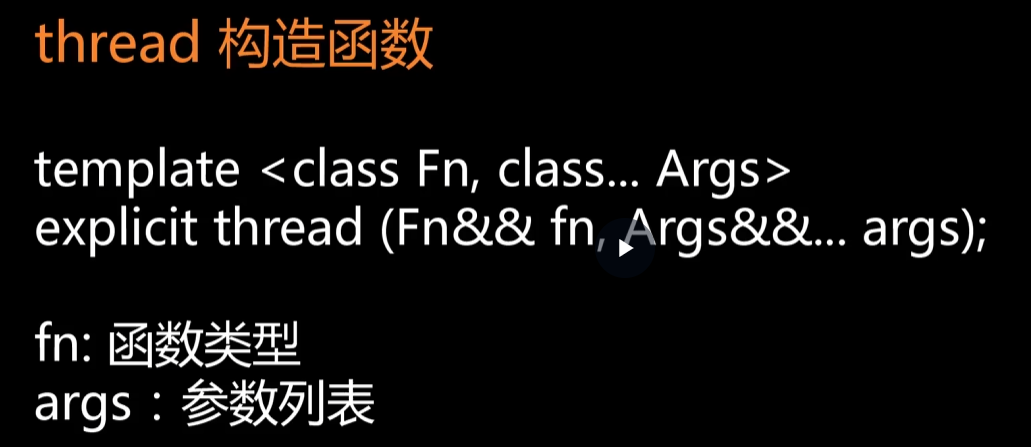
- 我们可以用普通函数、类的静态成员函数、类的非静态成员函数、lambda、仿函数来创建线程。
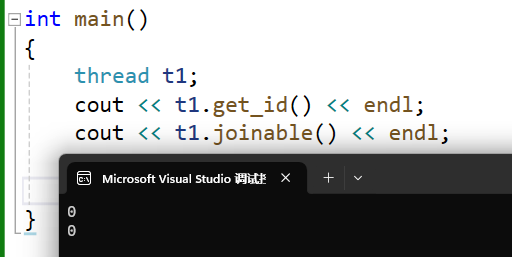
- 成员函数
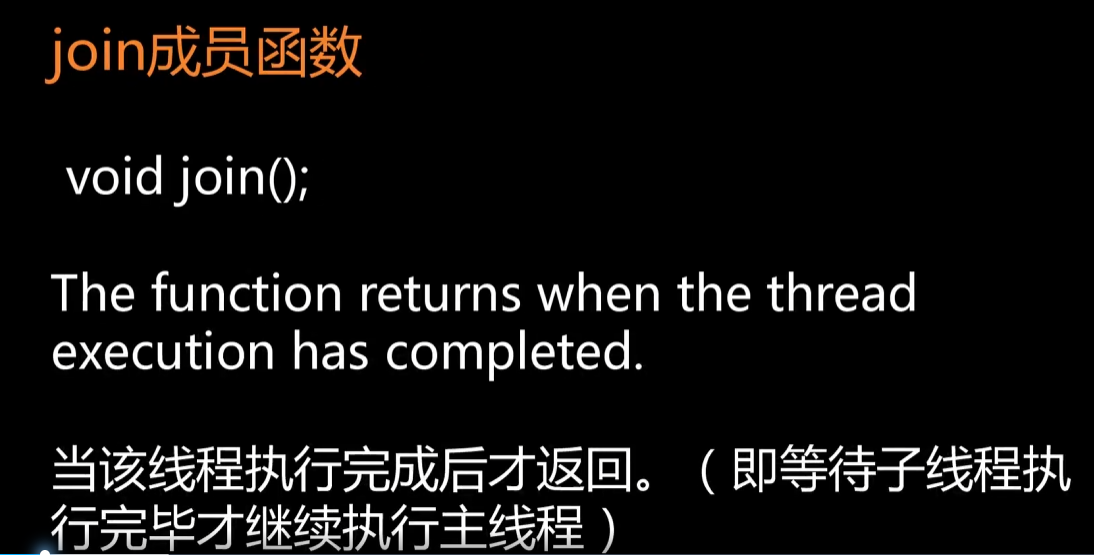
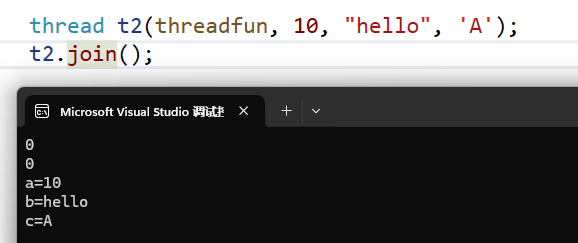
如果用detach()需要注意不能在子线程运行完之前退出主线程,否则子线程输出就会看不见。
this_thread命名空间
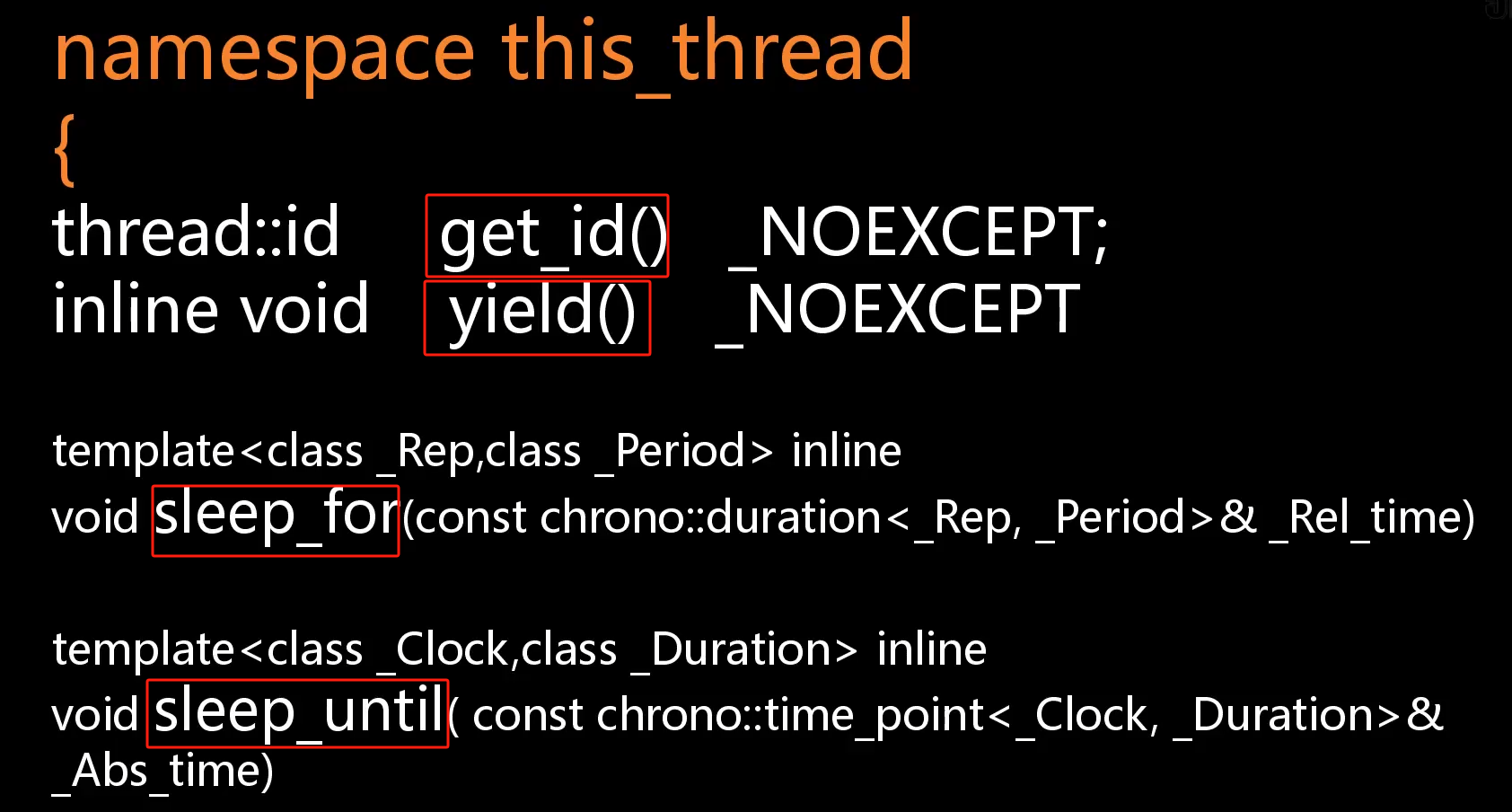
函数说明
std::this_thread::yield 是 C++11 标准库中的一个函数,位于 std::this_thread 命名空间内。它用于提示操作系统当前线程愿意放弃它的当前时间片,并允许调度器调度其他线程运行。
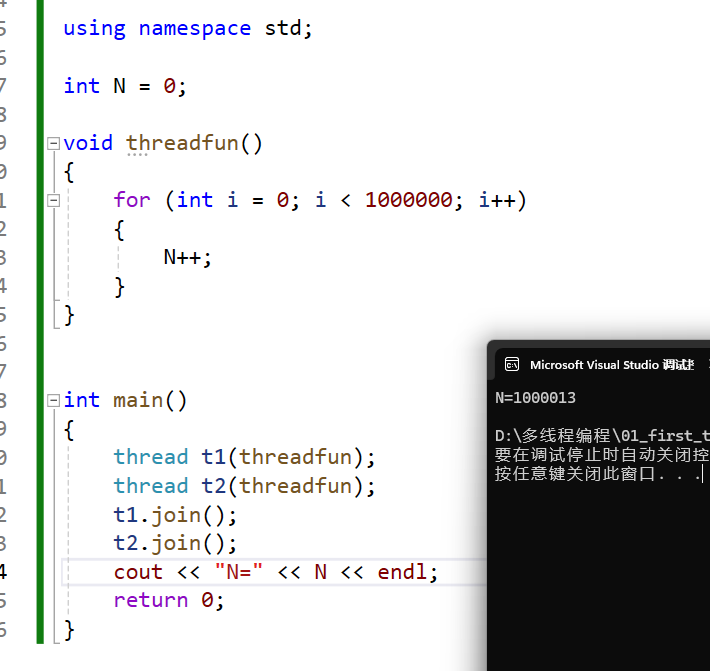
2.原子类atomic、atomic_flag
头文件:#include<atomic>
atomic
store:将值原子地存储到原子对象中。
void store(T desired, std::memory_order order = std::memory_order_seq_cst) noexcept;
std::atomic<int> atomicInt(0);
atomicInt.store(10); // 将值 10 存储到 atomicInt
desired: 要存储的新值。
order: 内存顺序(默认为 std::memory_order_seq_cst)。
load:从原子对象中原子地加载值。
T load(std::memory_order order = std::memory_order_seq_cst) const noexcept;
int value = atomicInt.load(); // 从 atomicInt 中加载值
order: 内存顺序(默认为 std::memory_order_seq_cst)。
exchange:原子地将原子对象的值设置为desired,并返回之前的值。
T exchange(T desired, std::memory_order order = std::memory_order_seq_cst) noexcept;
int oldValue = atomicInt.exchange(20); // 将 atomicInt 设置为 20,并返回之前的值
desired: 要存储的新值。
order: 内存顺序(默认为 std::memory_order_seq_cst)。
compare_exchange_weak和compare_exchange_strong
如果当前值等于 expected,则将原子对象的值设置为 desired,否则将当前值写入 expected。
bool compare_exchange_weak(T& expected, T desired, std::memory_order success, std::memory_order failure) noexcept;
bool compare_exchange_strong(T& expected, T desired, std::memory_order success, std::memory_order failure) noexcept;
int expected = 10;
bool success = atomicInt.compare_exchange_strong(expected, 30); // 如果 atomicInt 是 10,则设置为 30
expected: 期望的值。
desired: 要存储的新值。
success: 内存顺序(成功时)。
failure: 内存顺序(失败时)。
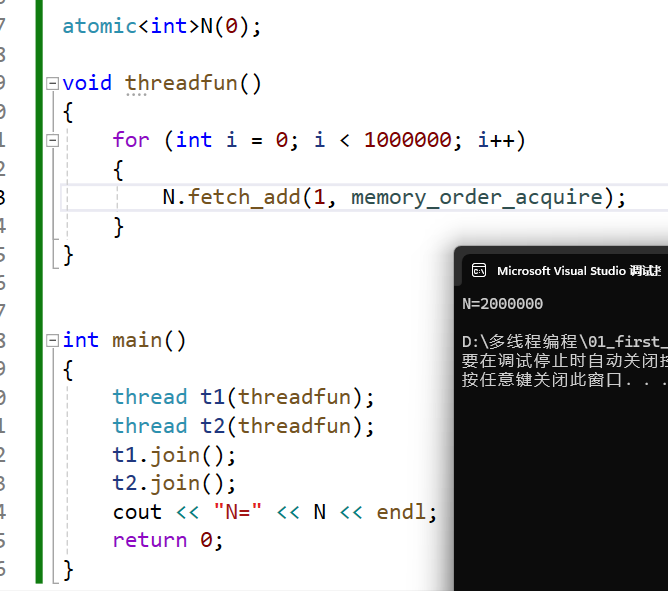
- fetch_add、fetch_sub(仅针对int的模板特化成员方法)
原子地将原子对象的值增加、减少 arg,并返回之前的值。
T fetch_add(T arg, std::memory_order order = std::memory_order_seq_cst) noexcept;
T fetch_sub(T arg, std::memory_order order = std::memory_order_seq_cst) noexcept;
int oldValue = atomicInt.fetch_add(5); // 将 atomicInt 增加 5,并返回之前的值
int oldValue = atomicInt.fetch_sub(3); // 将 atomicInt 减少 3,并返回之前的值
arg: 增加的值。order: 内存顺序(默认为std::memory_order_seq_cst)。
使用场景
- 计数器:使用
fetch_add和fetch_sub来实现线程安全的计数器。 - 标志位:使用
store,load,exchange来实现线程安全的标志位操作。 - 锁实现:使用
compare_exchange_weak或compare_exchange_strong来实现自旋锁等同步机制。 - 位操作:使用
fetch_and,fetch_or,fetch_xor来进行线程安全的按位操作。
atomic_flag
初始化:
-
如果一个
std::atomic_flag对象使用ATOMIC_FLAG_INIT宏初始化,那么可以保证该std::atomic_flag对象在创建时处于clear状态。 -
这意味着在初始化时,标志被设置为未设置(clear)。
-
test_and_set函数的返回值详解:- 初始状态:
std::atomic_flag对象初始化时,通常处于clear(未设置)状态(如果使用ATOMIC_FLAG_INIT初始化)。 - 第一次调用
test_and_set:如果 std::atomic_flag是 clear(未设置)状态,test_and_set会:- 返回
false,表示在调用前该标志是clear。 - 将
std::atomic_flag设置为set(已设置)状态。
- 返回
- 后续调用
test_and_set:如果 std::atomic_flag 已经是 set(已设置)状态,test_and_set 会:- 返回
true,表示在调用前该标志已经是set。 - 保持
std::atomic_flag处于set状态。
- 返回
- 初始状态:
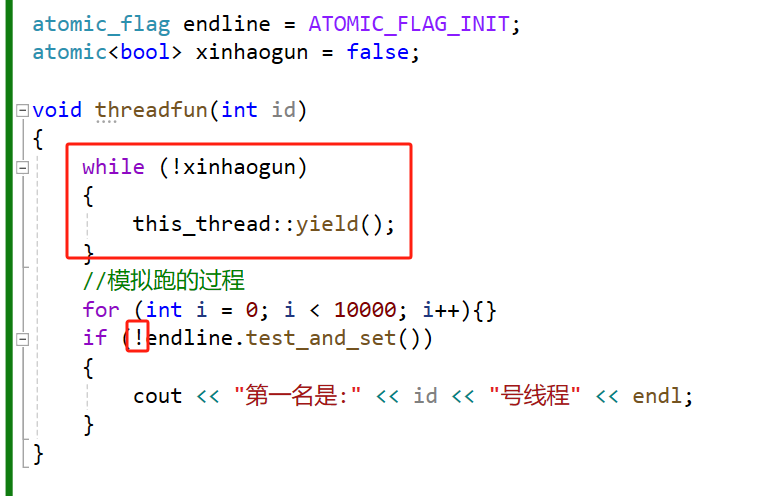
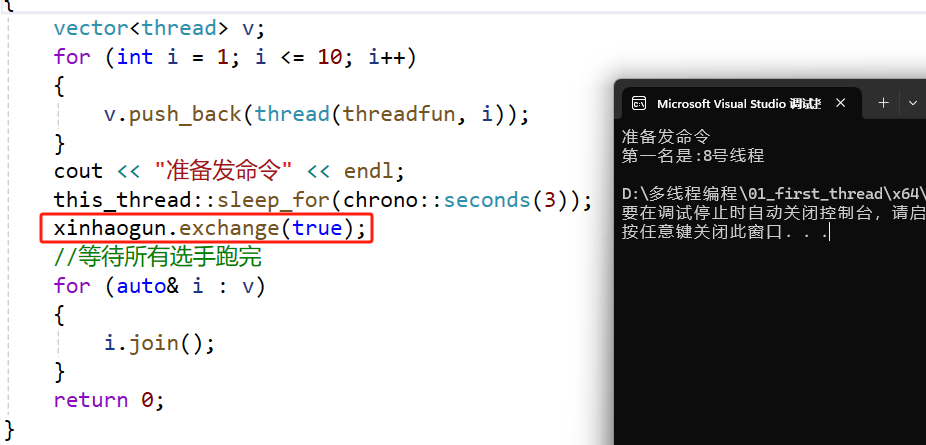
示例
假设有十个人准备赛跑,打印第一个到达终点的人的ID(第一个抢到锁的人)
3.互斥类mutex、recursive_mute
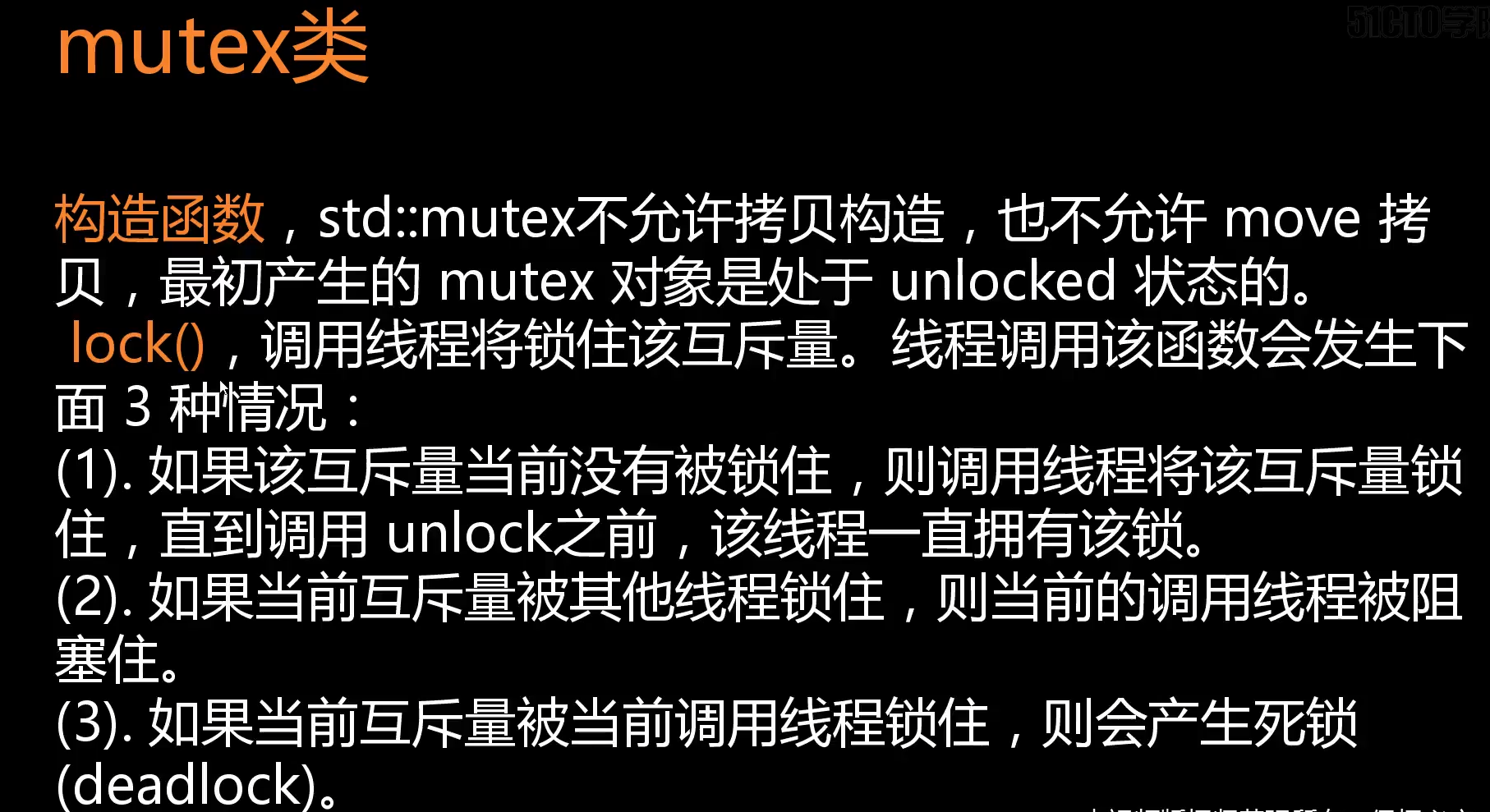
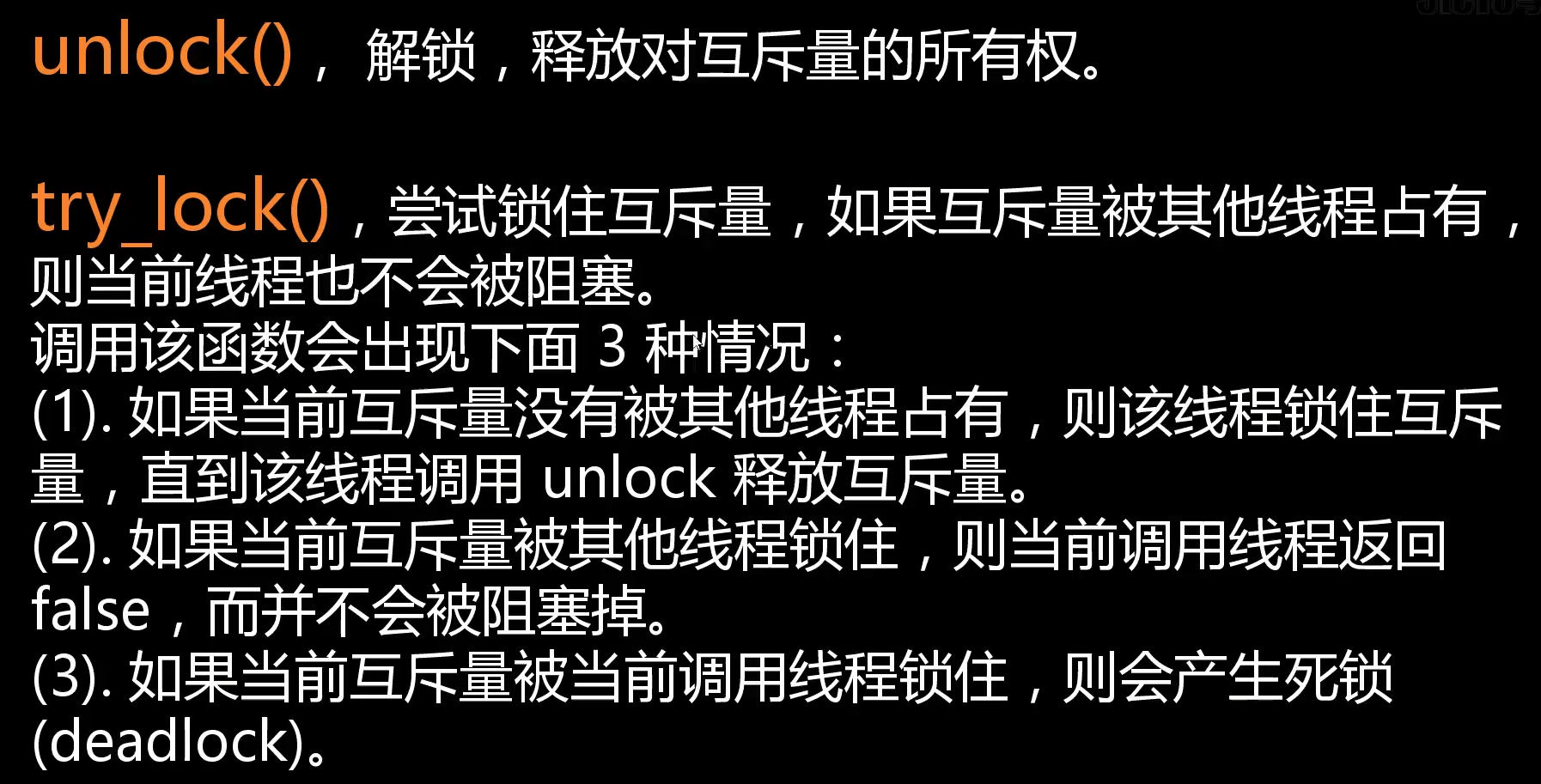
mutex类
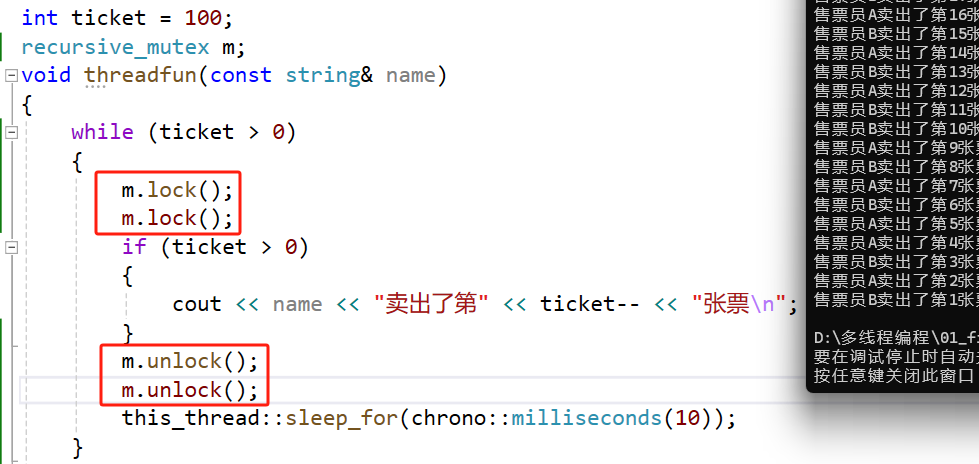
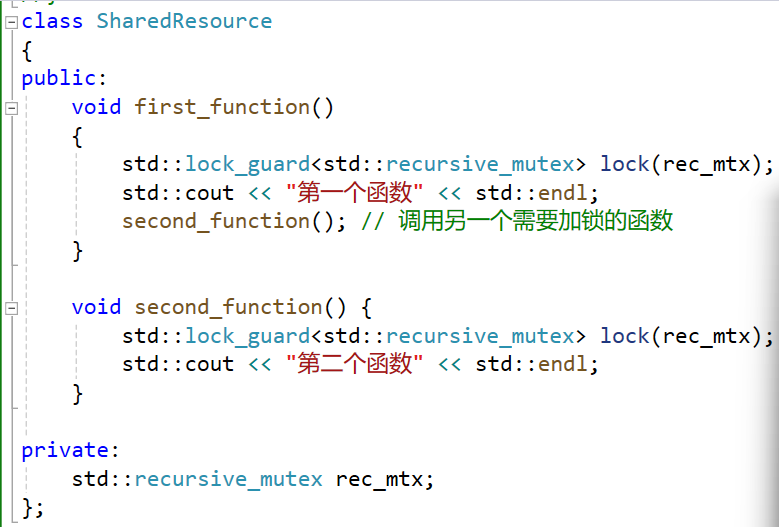
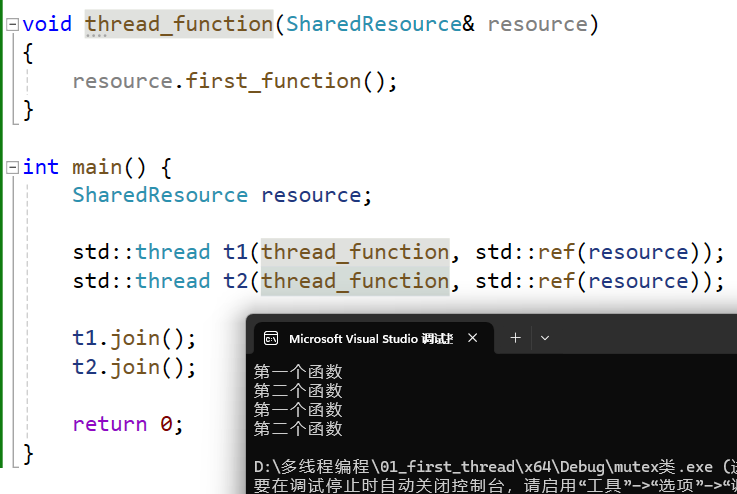
recursive_mutex类
递归函数:当一个函数需要递归调用自身并且每次调用都需要进入临界区时,std::recursive_mutex 可以确保同一线程在递归过程中可以多次加锁而不会死锁。
多个入口的临界区:当一个类的多个成员函数都需要加锁,并且这些成员函数可能互相调用时,使用 std::recursive_mutex 可以避免同一线程多次加锁导致的死锁。
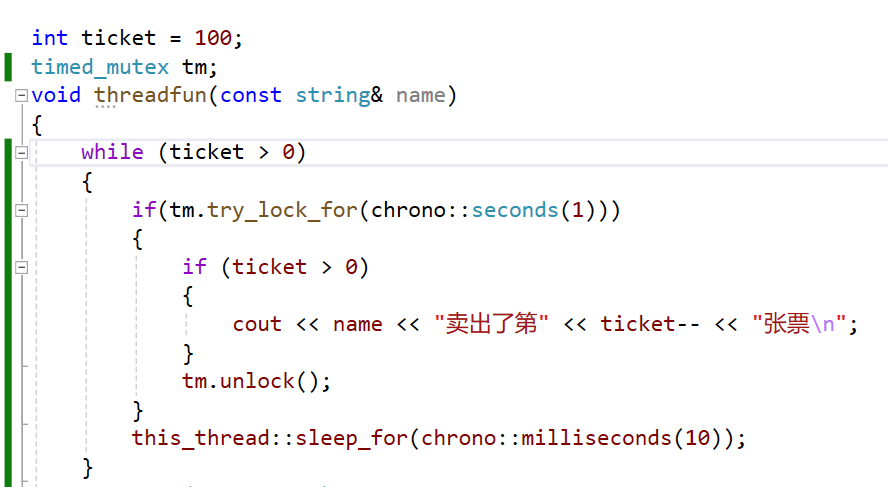
timed_mutex类
try_lock_for:尝试在指定的时间段内获取锁。如果在这段时间内锁可用,则获取锁并返回 true。如果在这段时间内锁一直不可用,则返回 false。
try_lock_until:尝试在指定的时间点之前获取锁。如果在此时间点之前锁可用,则获取锁并返回 true。如果在此时间点之前锁一直不可用,则返回 false。
recursive_timed_mutex类
示例
这里模拟火车站卖票的情况,使用c++11的mutex类。

4.锁管理类lock_guard、unique_lock
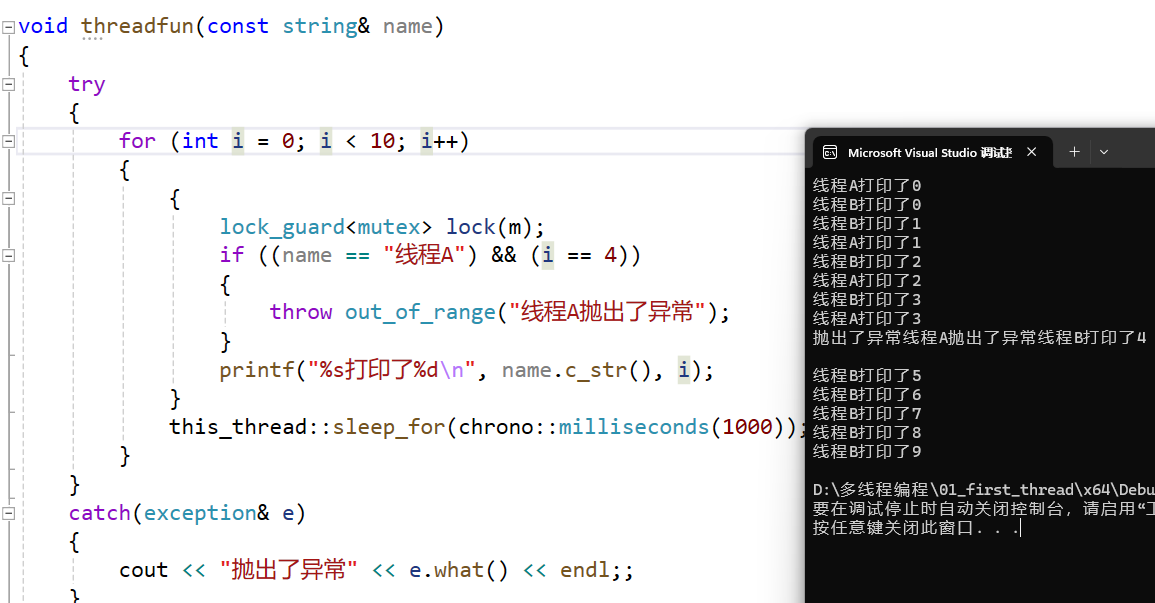
lock_guard类

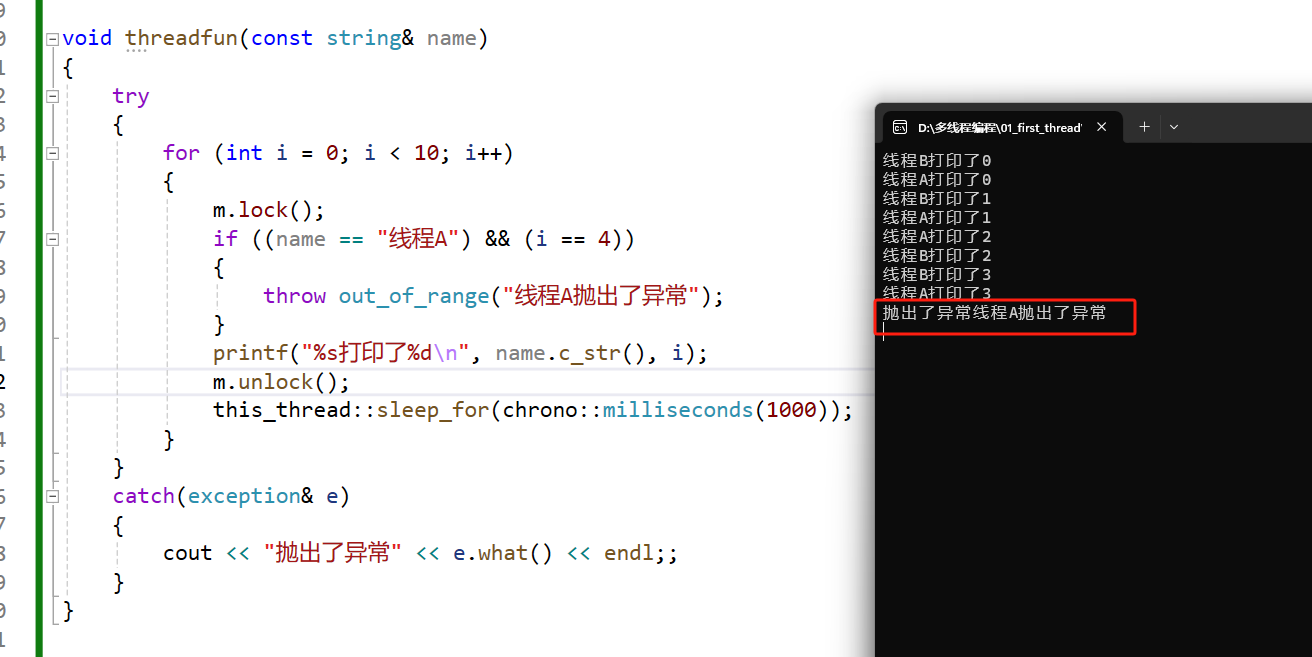
如果没有用lock_guard管理锁,那么当遇见抛出异常的时候,线程A的锁没有被释放,导致线程B死锁了。
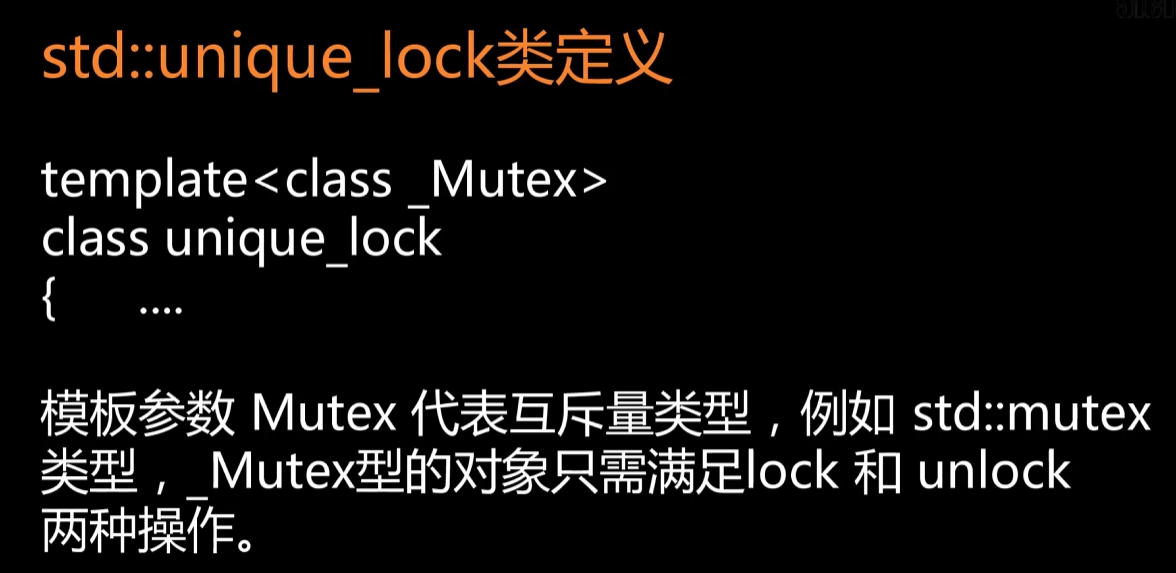
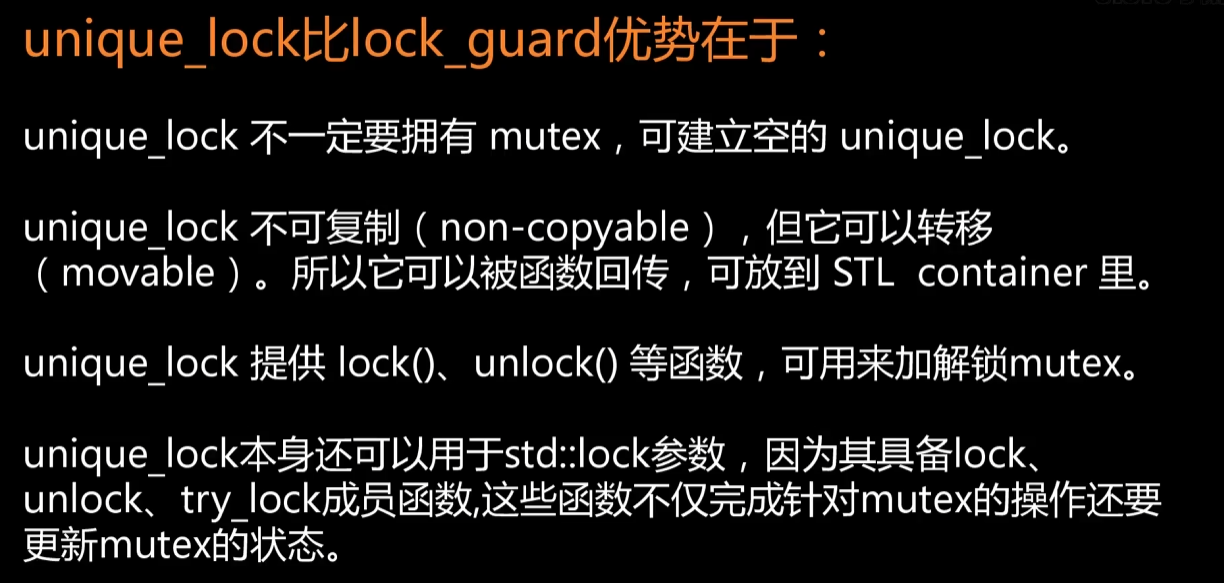
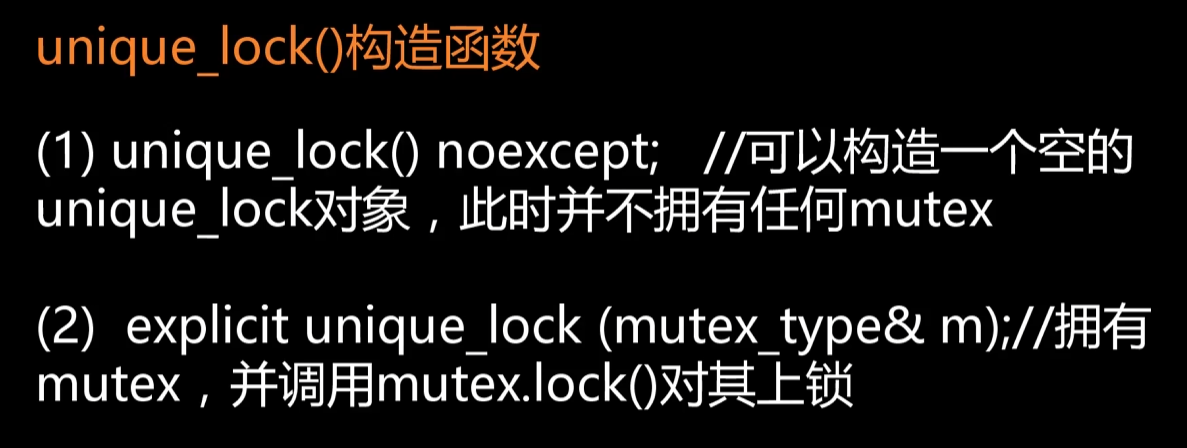
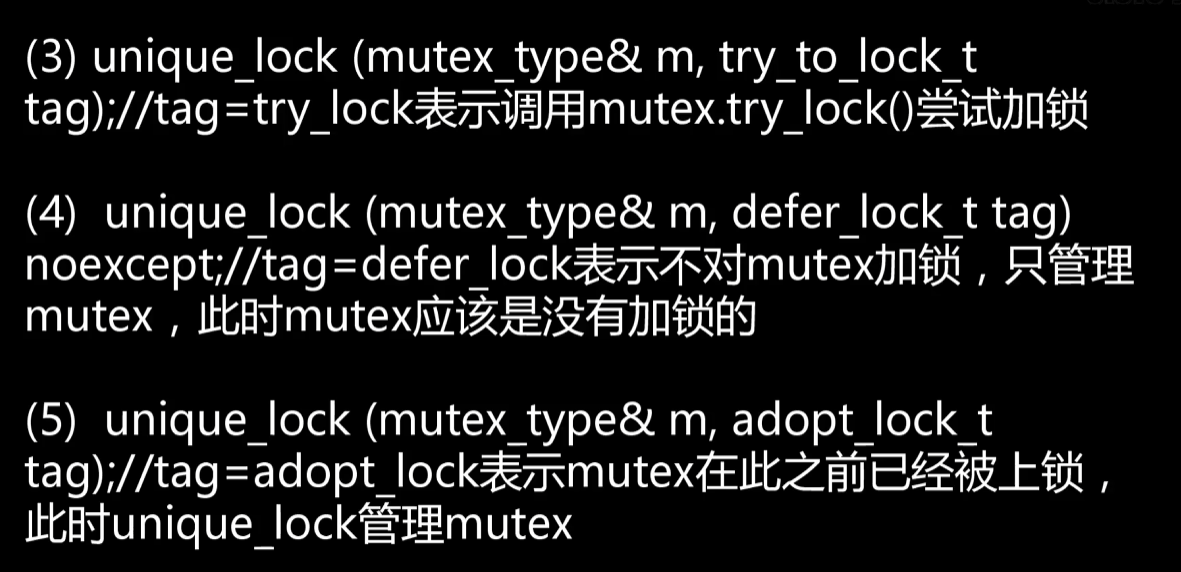
unique_lock类
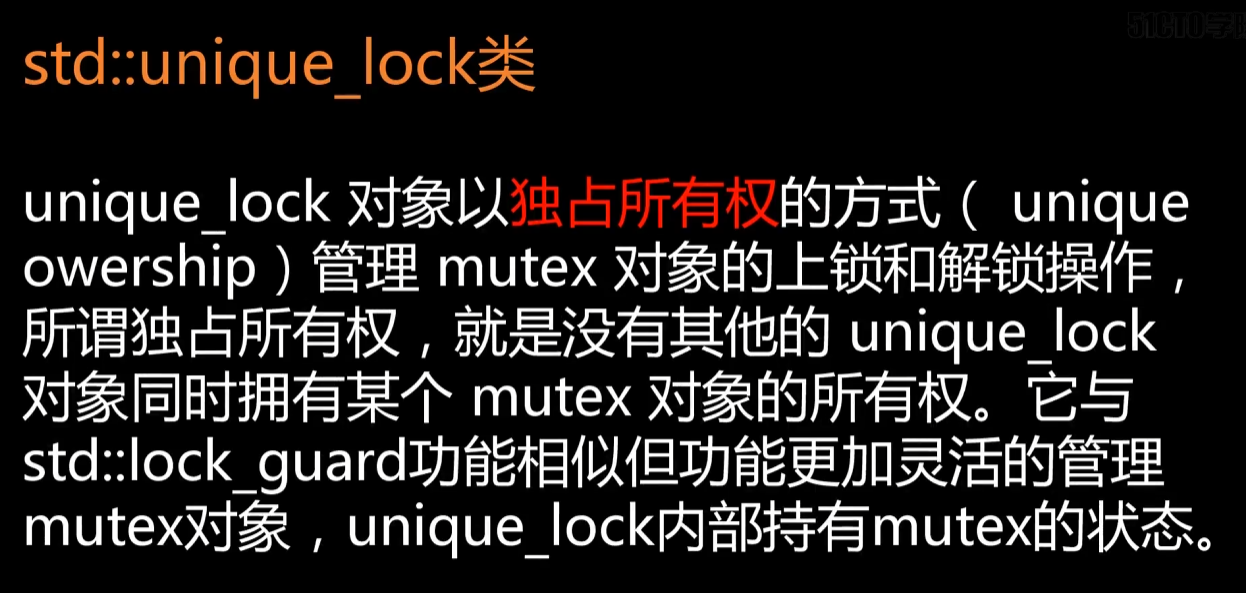
也就是说unique_lock不仅可以自动上锁、解锁,相较于lock_guard,还可以在对象创建后,手动加锁、解锁。
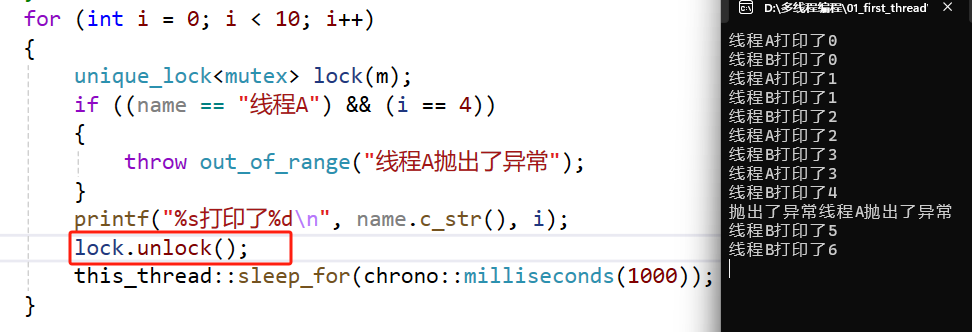
注意:为了不把线程休眠也加入临界区代码,我们可以用unique_lock管理锁,然后提前手动释放锁,同时遭遇了异常unique_lock也会自动释放锁。
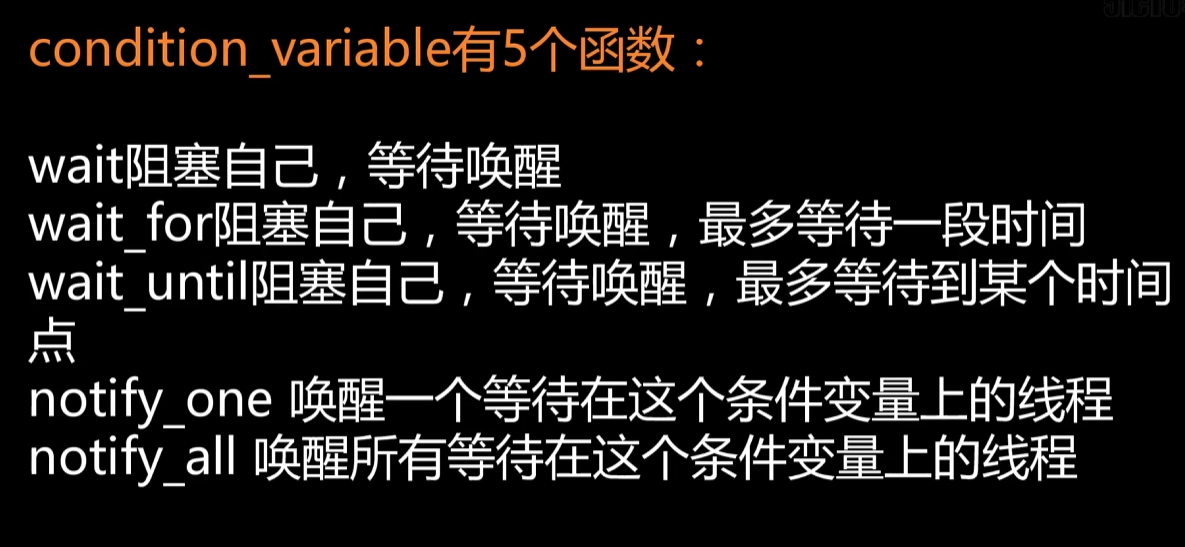
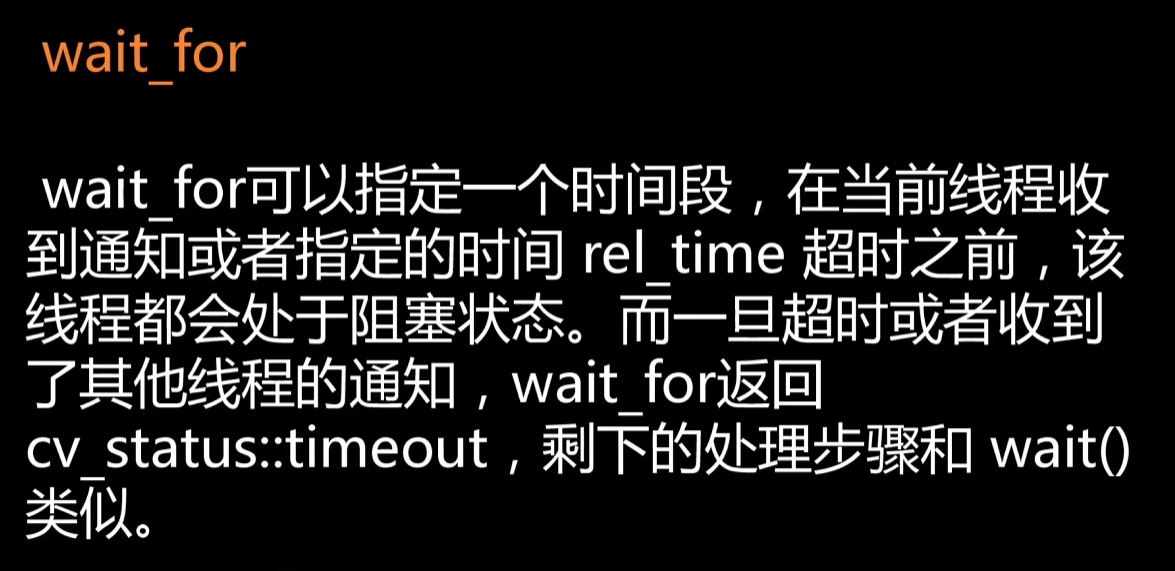
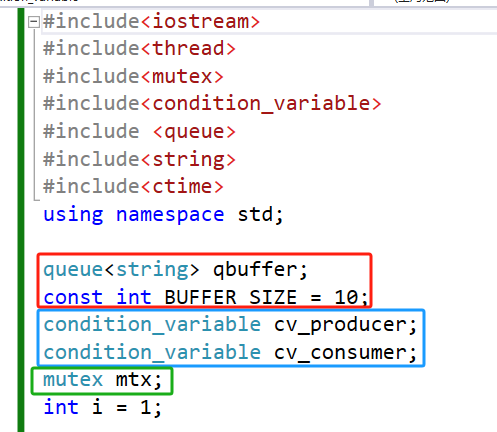
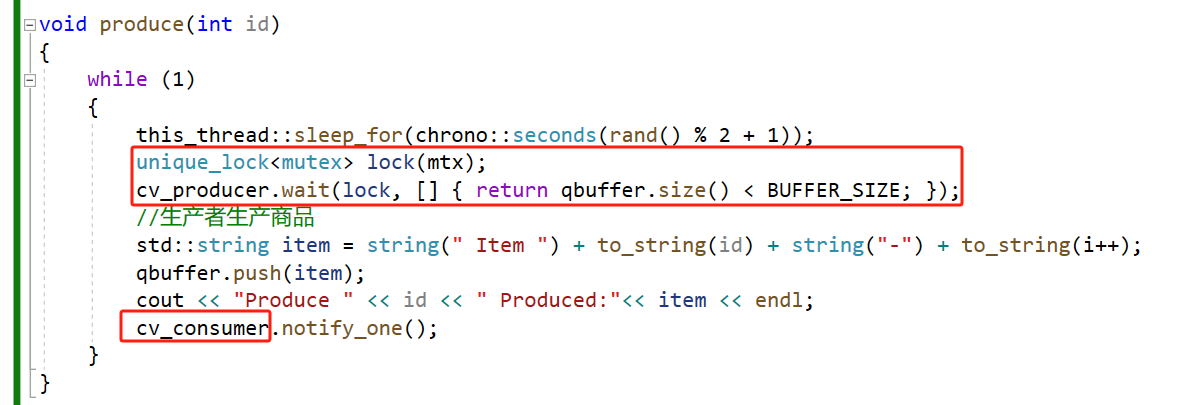
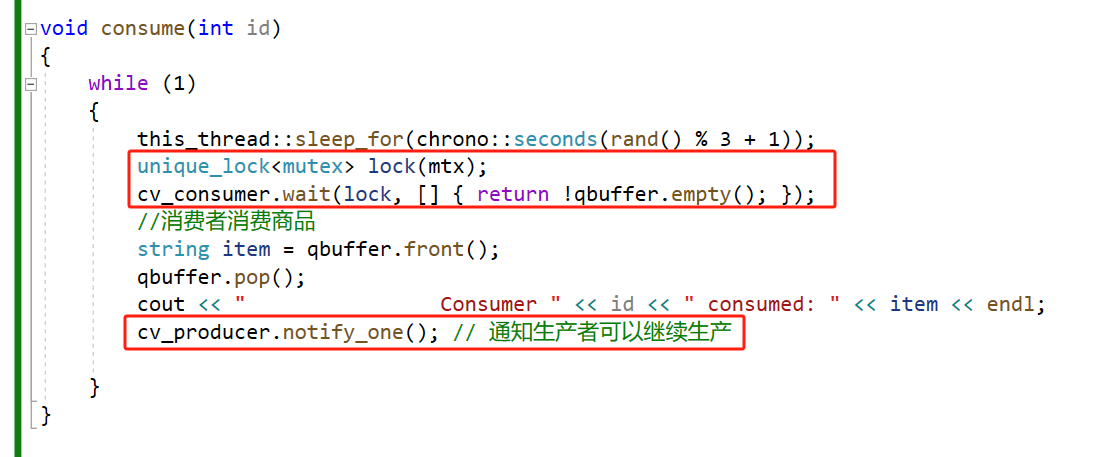
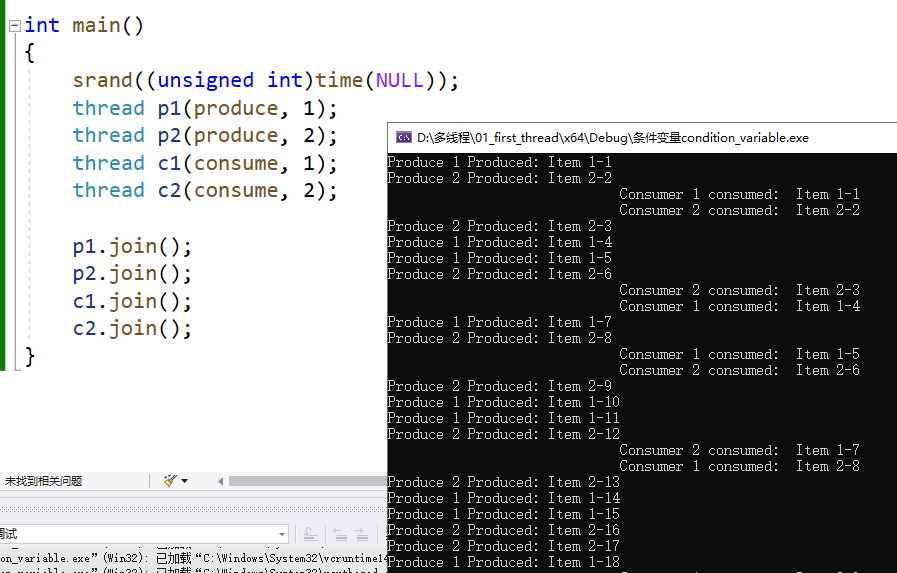
5.条件变量condition_variable类
头文件:#include<condition_variable>
condition_variable 是 C++11 标准库提供的一种同步原语,用于在线程之间同步访问共享数据。它与 mutex 结合使用,允许一个线程在某些条件满足之前等待,另一个线程在条件满足时通知等待的线程继续执行。
条件变量与互斥锁的区别
- 按条件通知:条件变量允许线程在满足特定条件时被唤醒,而不是所有等待锁的线程都被唤醒。通过使用条件变量,可以更加精确地控制线程的唤醒,从而提高程序的性能和效率。
- 等待与释放锁的结合:条件变量的
wait方法会自动释放锁并进入等待状态,这样其他线程可以访问共享资源。这种机制避免了死锁的风险,并确保线程能够在条件满足时及时被唤醒。
condition_variable 的基本原理是:
- 一个线程等待某个条件(通常是一个共享变量的状态)满足。
- 另一个线程改变共享变量的状态,并通知等待的线程条件已经满足。
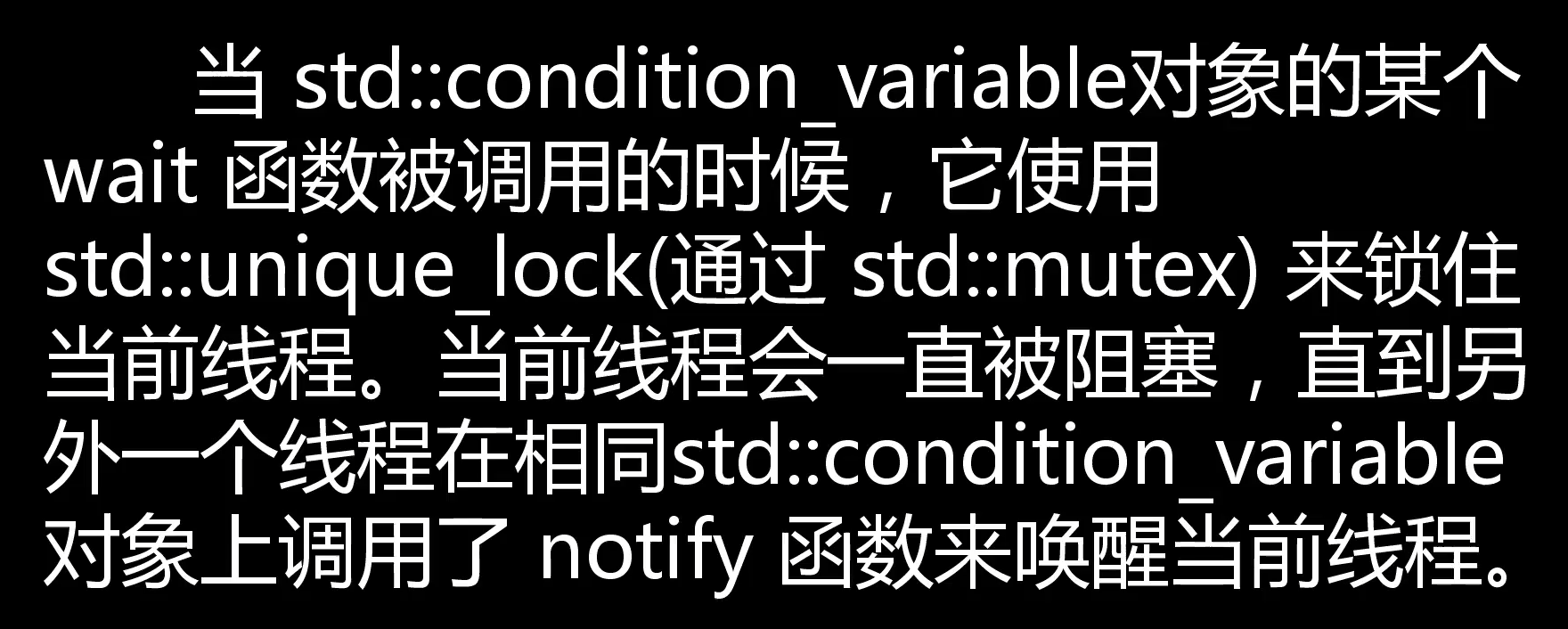
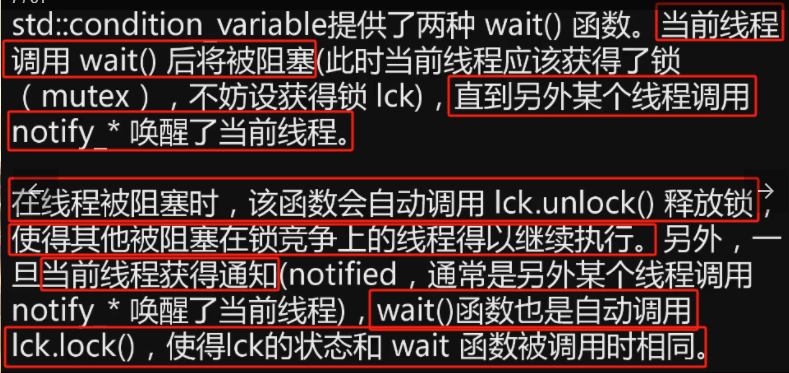
-
该方法会自动释放锁,并阻塞当前线程,直到其他线程调用
notify_one()或notify_all(),且条件满足为止。当线程被唤醒后,它会重新获取锁。 -
这是一个带谓词的等待方法。它在被唤醒后检查谓词
pred是否为真,如果不为真则继续等待。
wait(std::unique_lock<std::mutex>& lock)
wait(std::unique_lock<std::mutex>& lock, Predicate pred)
condition_variable_any 可以与任何符合锁的概念的锁对象一起使用,而不仅限于 std::unique_lock<std::mutex>。这种灵活性使其能够与自定义的锁类型或非互斥锁一起使用。
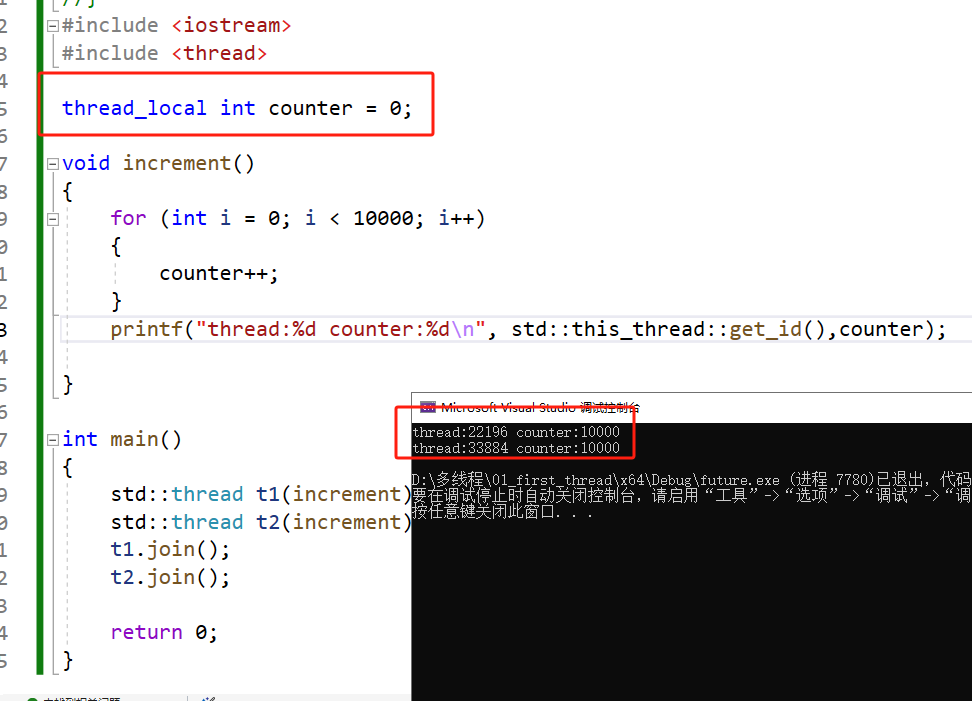
6.线程本地存储
thread_local 关键字用于声明线程局部存储变量,每个线程都有其独立的实例。
八、C++11多线程(异步)
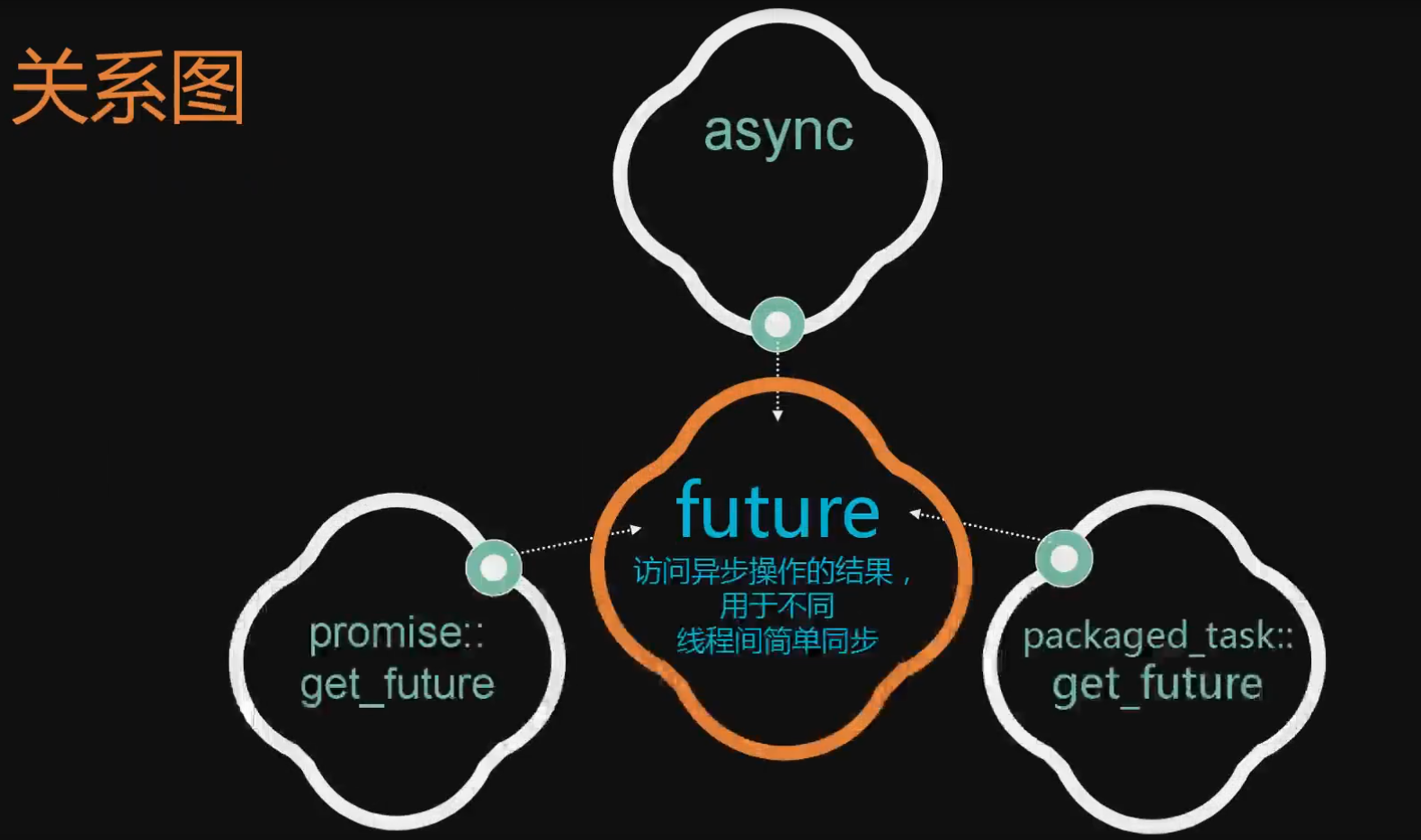
1.future类
头文件:#include<future>
有几种常用的方法可以让主线程获取子线程的结果:
- 使用全局或共享变量:使用一个全局或共享变量(例如
std::mutex和std::condition_variable)来存储结果,主线程在子线程完成后读取该变量。 - 使用
std::promise和std::future:这是标准库提供的一种更现代和灵活的方法。 - 使用回调函数:子线程完成任务后调用一个回调函数,将结果传递给主线程
#include <iostream>
#include <thread>
#include <functional>
void compute(std::function<void(int)> callback, int x) {
int result = x * x; // 假设计算结果是 x 的平方
callback(result);
}
int main() {
auto callback = [](int result) {
std::cout << "Result is: " << result << std::endl;
};
std::thread t(compute, callback, 5);
t.join(); // 等待线程完成
return 0;
}
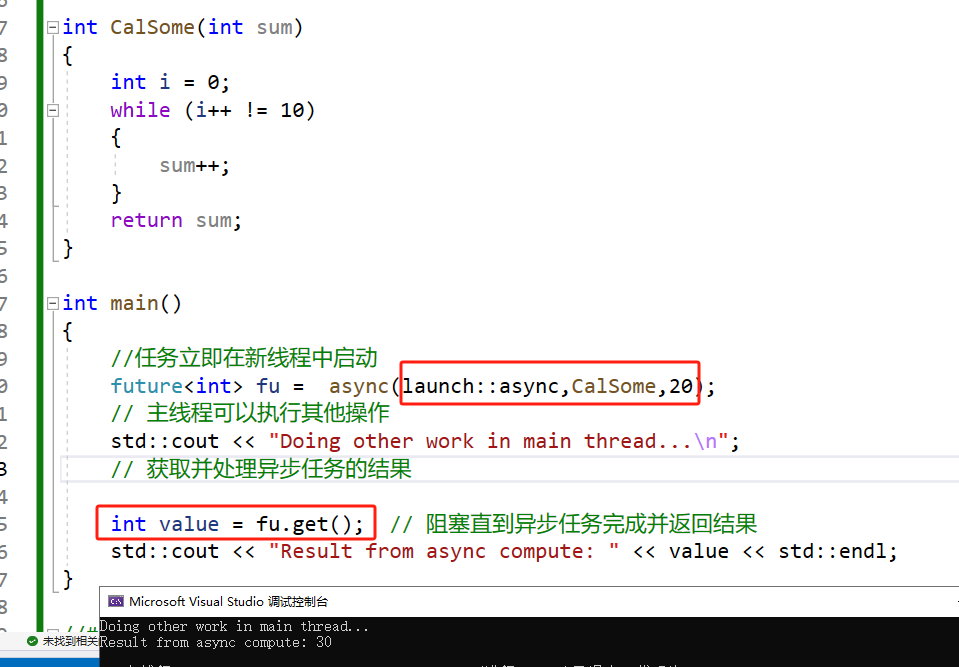
std::launch 枚举
std::launch 枚举包含以下两个值:
std::launch::async:强制异步执行,任务会在独立的线程中立即启动。std::launch::deferred:延迟执行,任务只有在调用future::get或future::wait时才会执行。
启动策略的区别
- 仅传递函数和参数:如果不指定启动策略,编译器可以选择立即启动任务或延迟执行任务。这种情况下的行为是实现定义的,可能在不同的实现中有所不同。
std::launch::async:强制异步执行,任务会在独立的线程中立即启动。std::launch::deferred:延迟执行,任务只有在调用future::get或future::wait时才会执行。
此外,future类也有wait成员函数。
future::wait() 的用途
- 单独等待任务完成:在一些场景中,你可能需要在获取结果之前做一些其他的处理,而不仅仅是获取结果。例如,等待任务完成后进行一些状态检查或准备工作。
- 组合多个任务:在管理多个异步任务时,你可能希望先等待所有任务完成,然后再获取它们的结果。
- 超时等待:与
wait_for和wait_until结合使用,可以实现超时等待,避免无限期阻塞。
future::wait() :用于阻塞当前线程,直到异步任务完成,但不获取结果。
future::get() :既会等待任务完成,又会获取结果。
2.promise类
头文件:#include<future>

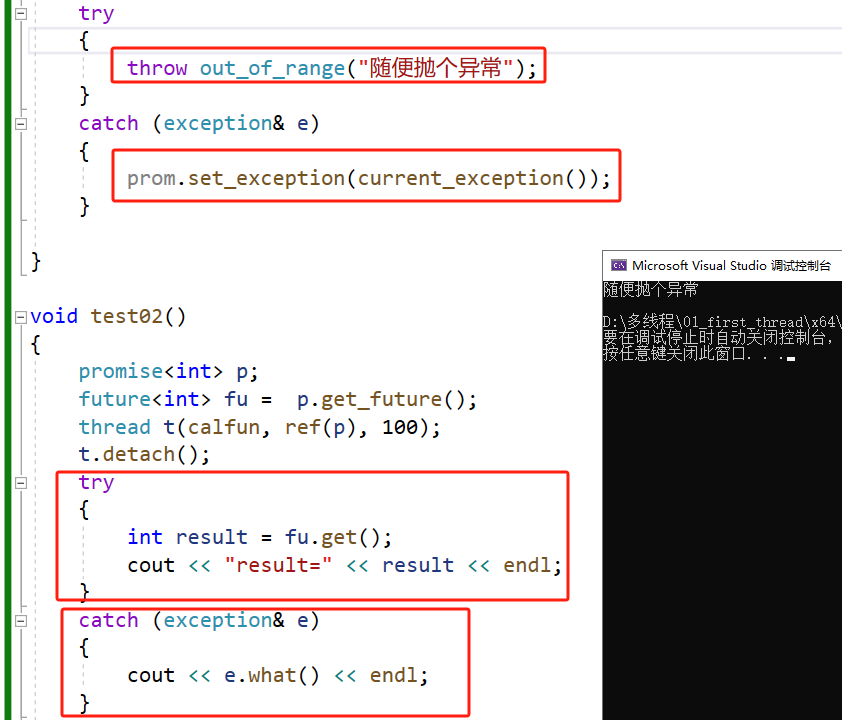
std::current_exception 是 C++11 引入的一个标准库函数,用于捕获当前线程正在处理的异常。这个函数返回一个 std::exception_ptr,可以在不同线程之间传递并重新抛出异常。
注意:
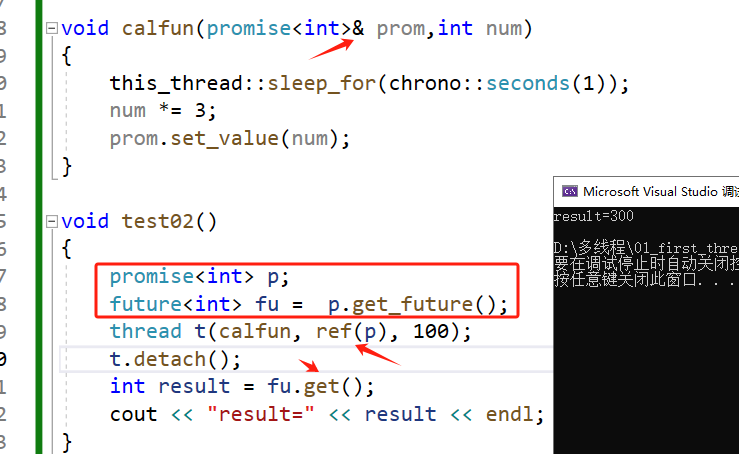
- 为什么传递
std::promise对象时需要使用std::ref?
当你启动一个线程并传递参数时,std::thread 会对传递的参数进行拷贝。这意味着,如果你直接传递 promise<int> p,std::thread 会尝试拷贝这个对象,而 std::promise 是不可拷贝的(其拷贝构造函数是被删除的)。
std::ref 可以解决这个问题。std::ref 创建一个 std::reference_wrapper 对象,指示 std::thread 在传递参数时传递的是引用而不是拷贝。这使得 calfun 函数中的 prom 仍然是 test02 函数中创建的 std::promise<int> 对象。
- 为什么
t.detach()是必要的?
在 C++ 中,std::thread 对象的生命周期是需要显式管理的。当一个 std::thread 对象创建时,必须对其进行 join 或 detach 操作,否则在其析构时会调用 std::terminate,导致程序崩溃。这是为了确保程序不会因为有未处理的线程而意外退出。
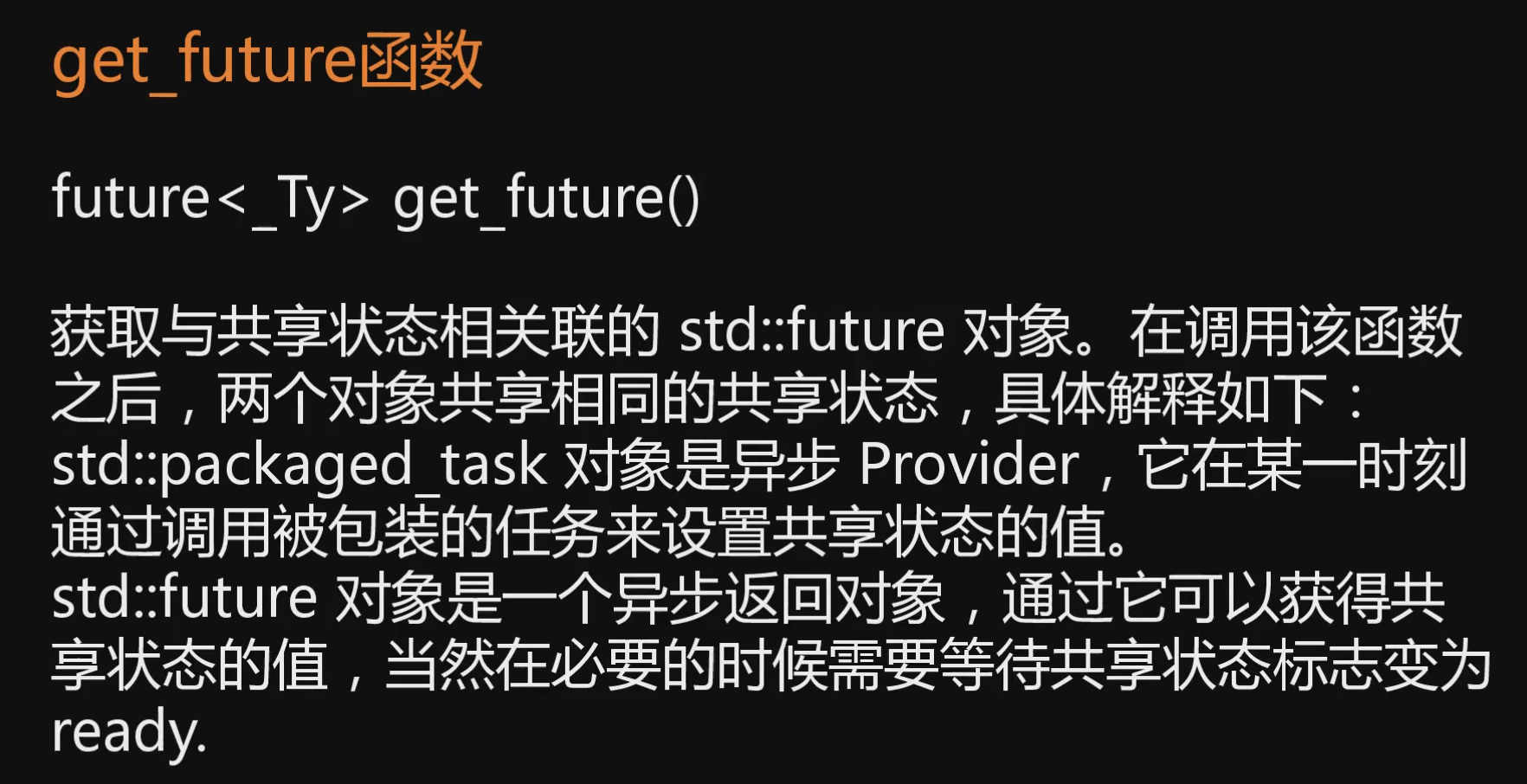
3.packaged_task类
头文件:#include<future>
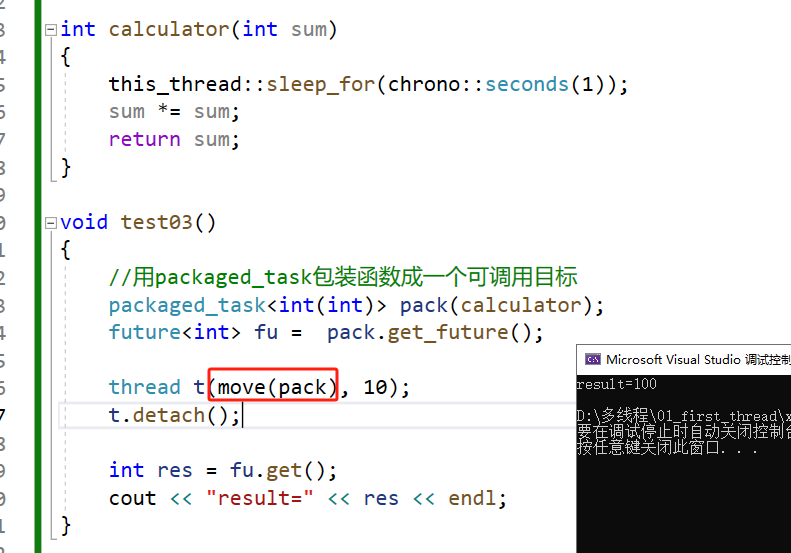
注意:
使用 std::move 将 std::packaged_task 对象传递给 std::thread 的原因在于 std::packaged_task 是不可复制的对象(其拷贝构造函数和拷贝赋值运算符被删除)。为了将 std::packaged_task 转移到新的线程中,必须使用移动语义。
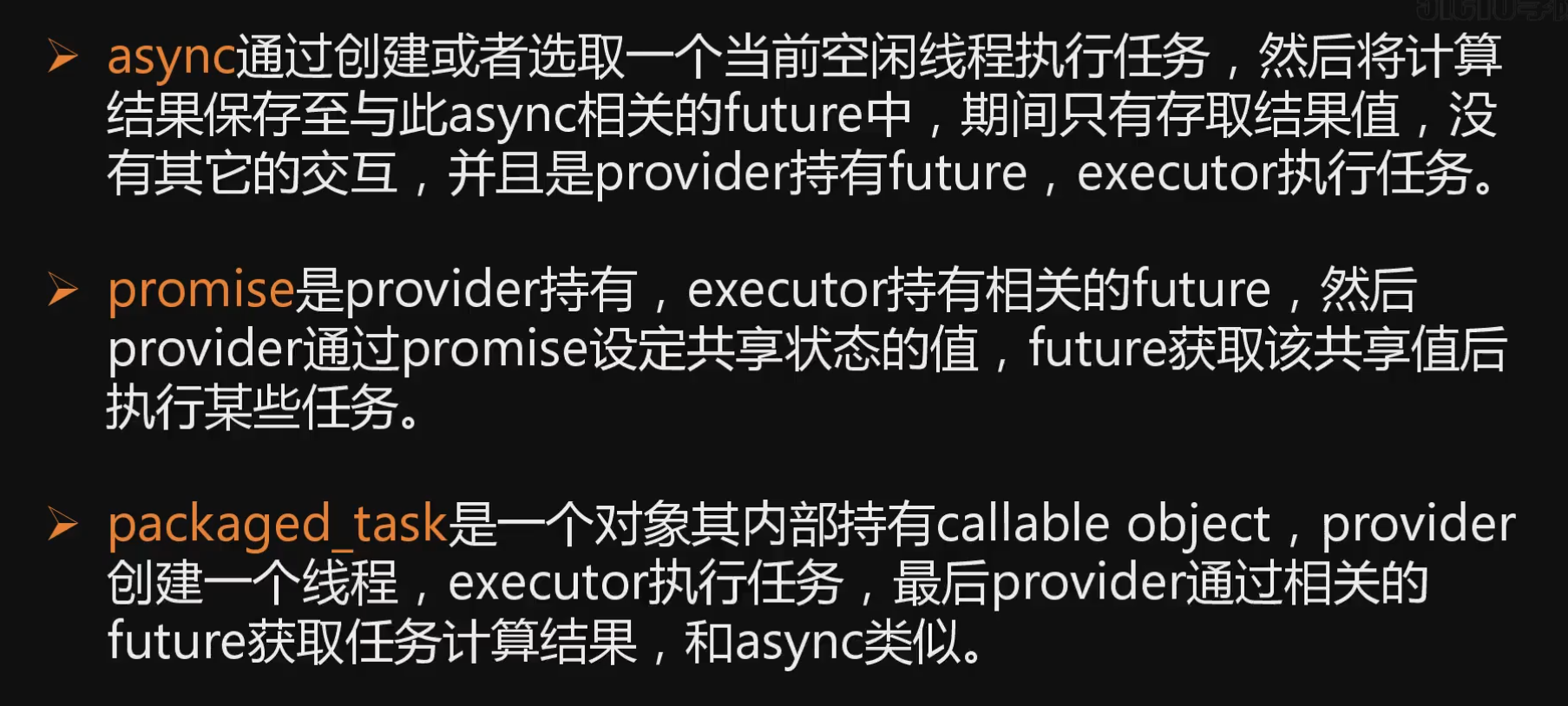
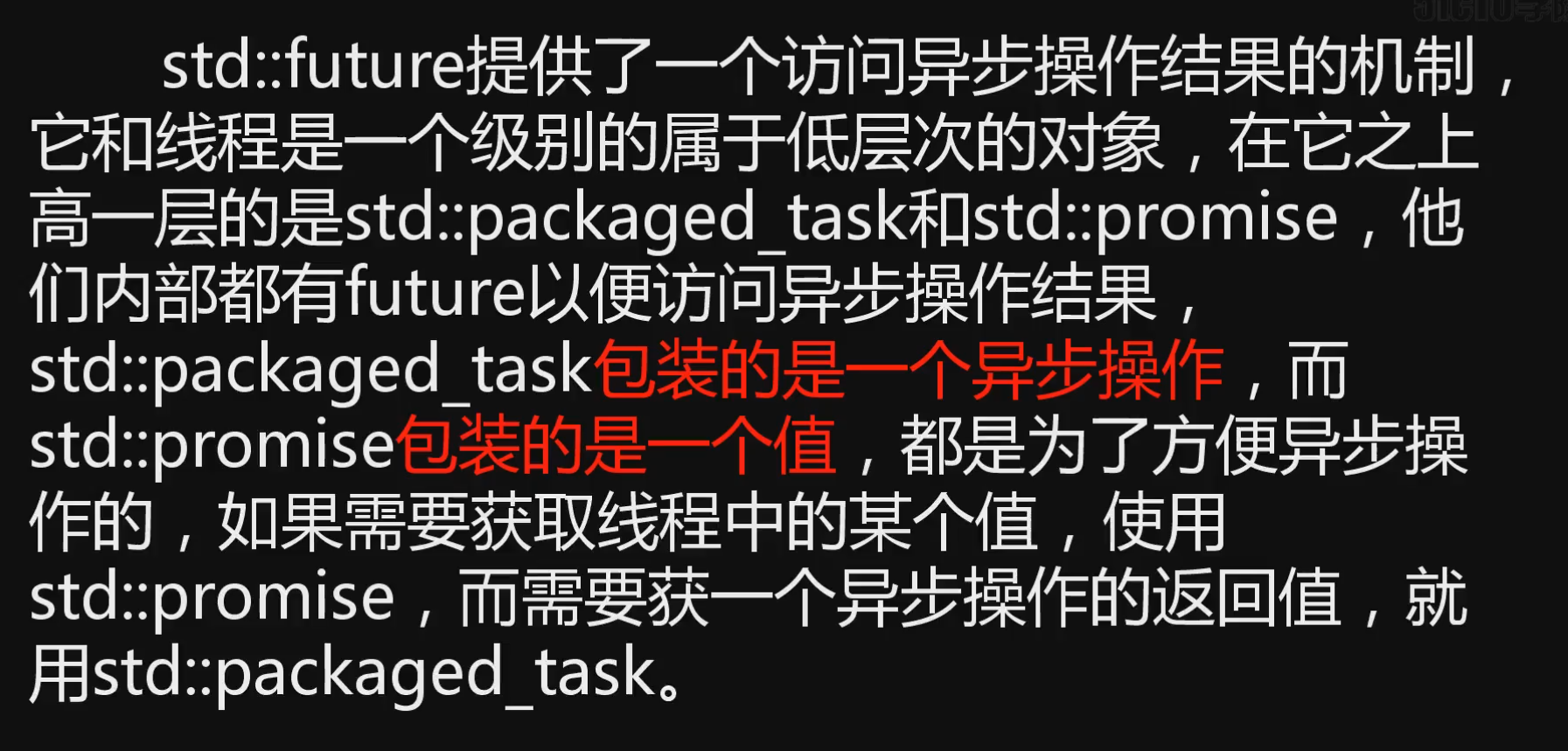
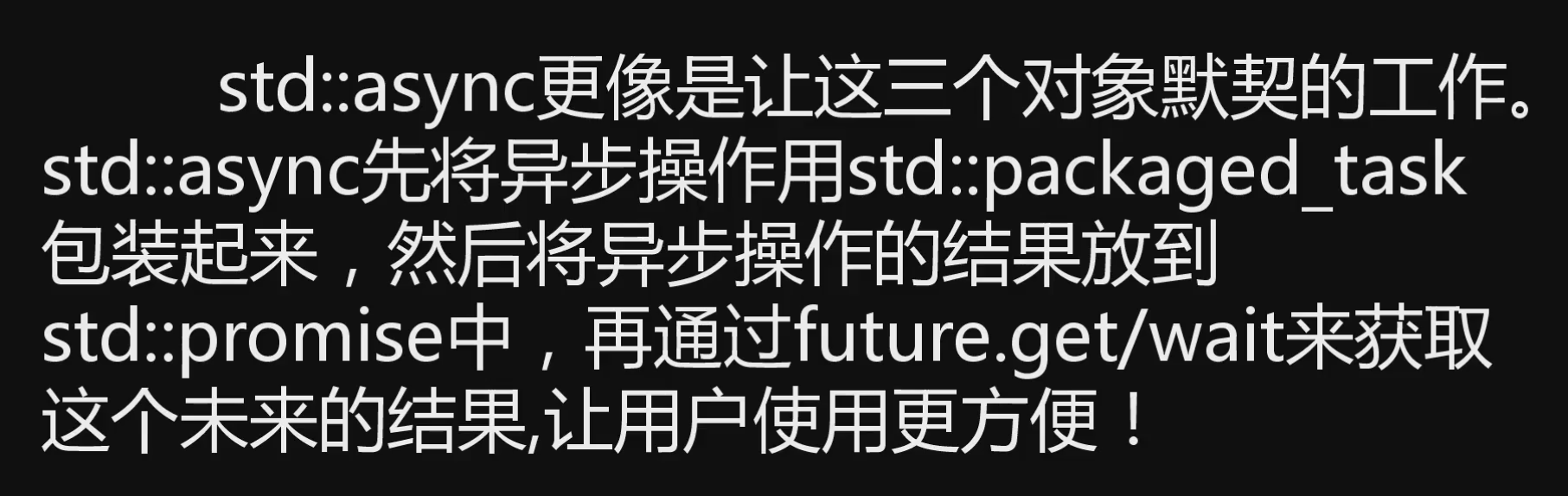
4.future相关总结















 337
337

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









