







 OPENGL三维场景搭建、漫游、交互标签(空格分隔): OPENGL这是博主的一次实验,实验截止日期还没有到。等deadline过后,博主附上源码。 源码地址:更新:OPENGL三维场景搭建、漫游、交互程序在读取OBJ模型基础上完成,传送门:OPENGL读取OBJ模型天空盒读取bmp图像像素信息(这里以24位BMP图像为例) 这里大家需要自行复习一下BMP图像的组成。在这里我就不详述了。给大家一
OPENGL三维场景搭建、漫游、交互标签(空格分隔): OPENGL这是博主的一次实验,实验截止日期还没有到。等deadline过后,博主附上源码。 源码地址:更新:OPENGL三维场景搭建、漫游、交互程序在读取OBJ模型基础上完成,传送门:OPENGL读取OBJ模型天空盒读取bmp图像像素信息(这里以24位BMP图像为例) 这里大家需要自行复习一下BMP图像的组成。在这里我就不详述了。给大家一
OPENGL三维场景搭建、漫游、交互
标签(空格分隔): OPENGL
这是博主的一次实验,实验截止日期还没有到。等deadline过后,博主附上源码。
源码地址:更新:OPENGL三维场景搭建、漫游、交互
程序在读取OBJ模型基础上完成,传送门:OPENGL读取OBJ模型
天空盒
读取bmp图像像素信息(这里以24位BMP图像为例)
这里大家需要自行复习一下BMP图像的组成。在这里我就不详述了。给大家一个传送门:
BMP图像组成
BMP图像的组成:BITMAPFILEHEADER、BITMAPINFOHEADER、RGBTRIPLE(16位和256色特有)、位图数据(即像素信息)。
读取BMP跳过BITMAPFILEHEADER与BITMAPINFOHEADER结构,得到图像大小数据,然后分配数据空间读取像素信息,将该空间的数据作为纹理数据。
注意:读24位BMP时需要注意,24位BMP像素信息储存顺序位BGR,而不是RGB,读完数据后,需要把数据信息“处理”一下,否则最终贴图颜色不正确。
下图中,图一为错误颜色,图二为正确颜色。
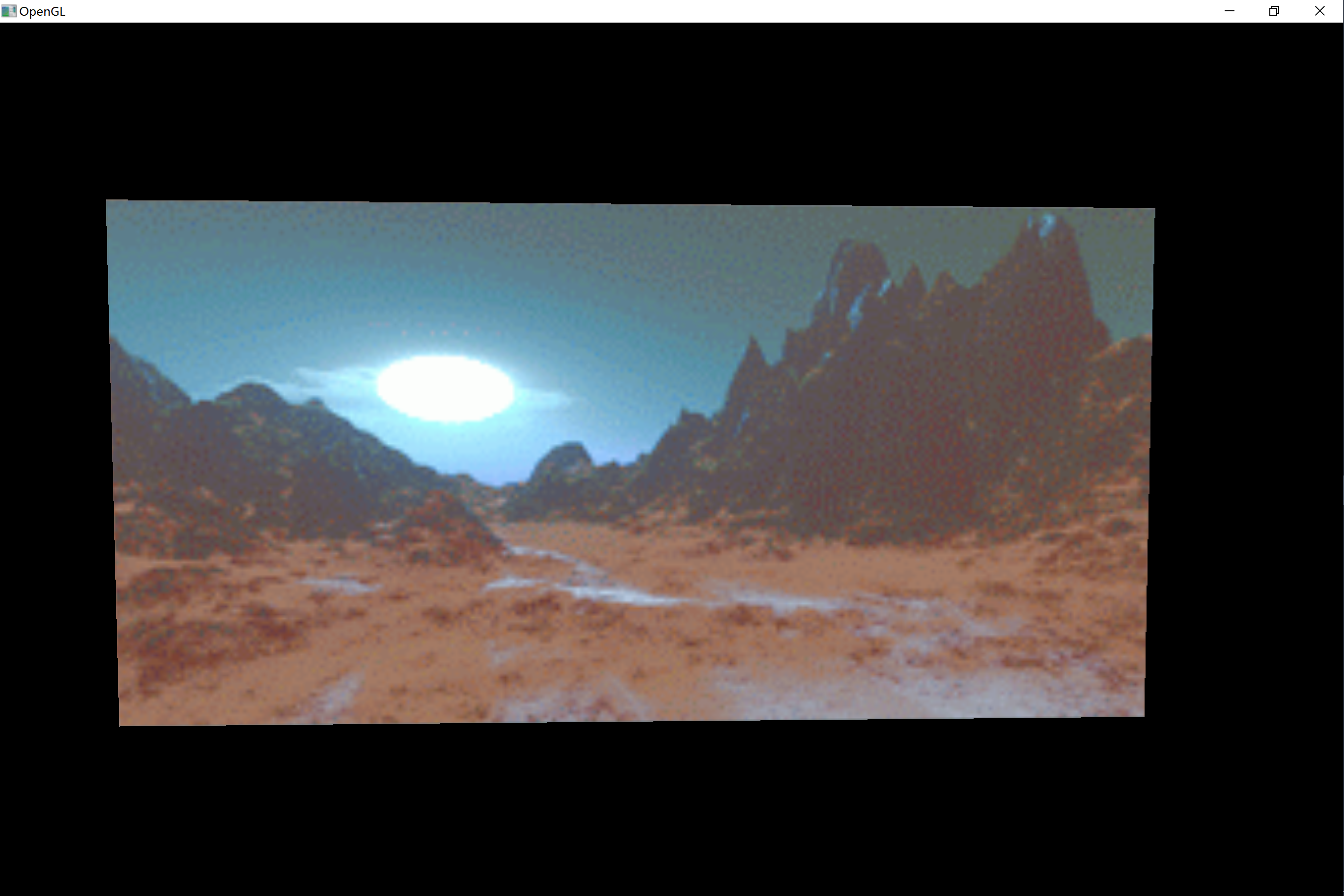

天空盒结果:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3670
3670











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









