







目录
快速上手步骤
系统要求
| 包管理 | 操作系统 | 版本 | 内核 | 参考下载地址 |
|---|---|---|---|---|
| rpm | CentOS | 7.6 | 3.10.0-957.el7.x86_64 | 链接:https://pan.baidu.com/s/1cpb3O_5xmvLcAGtekFhxIg 提取码:q2zq |
| 8.5 | 4.18.0-348.el8.x86_64 | |||
| NFS | 3.2 | 3.10.0-957.nfs.5.x86_64 | 链接:https://pan.baidu.com/s/1YyOMbKlr1BiiGVkRNvbPQw 提取码:8h03 | |
| 4.0 | 4.19.113-11.nfs4.x86_64 | |||
| 4.0-Desktop | 5.4.0-49-generic | |||
| Anolis | 8.4 | 4.19.91-23.4.an8.x86_64 | 链接:https://mirrors.openanolis.cn/anolis/ | |
| 8.6 | 4.19.91-26.an8.x86_64 | |||
| Kylin | v10 SP2 | 4.19.90-24.4.v2101.ky10.x86_64 | 链接:http://distro-images.kylinos.cn:8802/web_pungi/download/share/wA7vpuh4S5ZrxLWRXVBgGO0d9TfJqijD | |
| UOS | 1021e | 4.19.90-2109.1.0.0108.up2.uel20.x86_64 | 链接:https://www.chinauos.com/resource/download-server | |
| openEuler | 22.03 | 5.10.0-60.18.0.50.oe2203.x86_64 | 链接:https://openeuler.org/zh/download/ | |
| deb | Ubuntu | 20.04.1 | 5.4.0-42-generic | 链接:https://pan.baidu.com/s/1CS8nAsOM8zvKIU3eB4WqAg 提取码:ksk3 |
| 22.04 | 5.15.0-43-generic |
注:建议使用Centos7.6或者Ubuntu20.04,内核查看命令:uname -r
您仅需以下几步便可以开始体验DCU加速卡:
第一步:硬件安装
1.将DCU加速卡插入主板的PCIe插槽,并连接好电源线,如图所示:

2.通过lspci | grep -i Display命令查看是否检测到DCU加速卡,如图所示一张DCU加速卡被识别:(问题排查1)
第二步:驱动安装
➡rpm系列系统(CentOS,NFS,Anolis,Kylin,UOS,openEuler)
-
安装驱动依赖包
yum install -y \ cmake \ automake \ gcc \ gcc-c++ \ rpm-build \ autoconf \ kernel-devel-`uname -r` \ kernel-headers-`uname -r` -
获取驱动
注:可前往开发者社区→资源工具→驱动,获取latest驱动下载地址。
-
安装驱动
注:卸载驱动请执行命令
rpm -e rock。chmod 755 rock*.run \ && ./rock*.run \ && reboot -
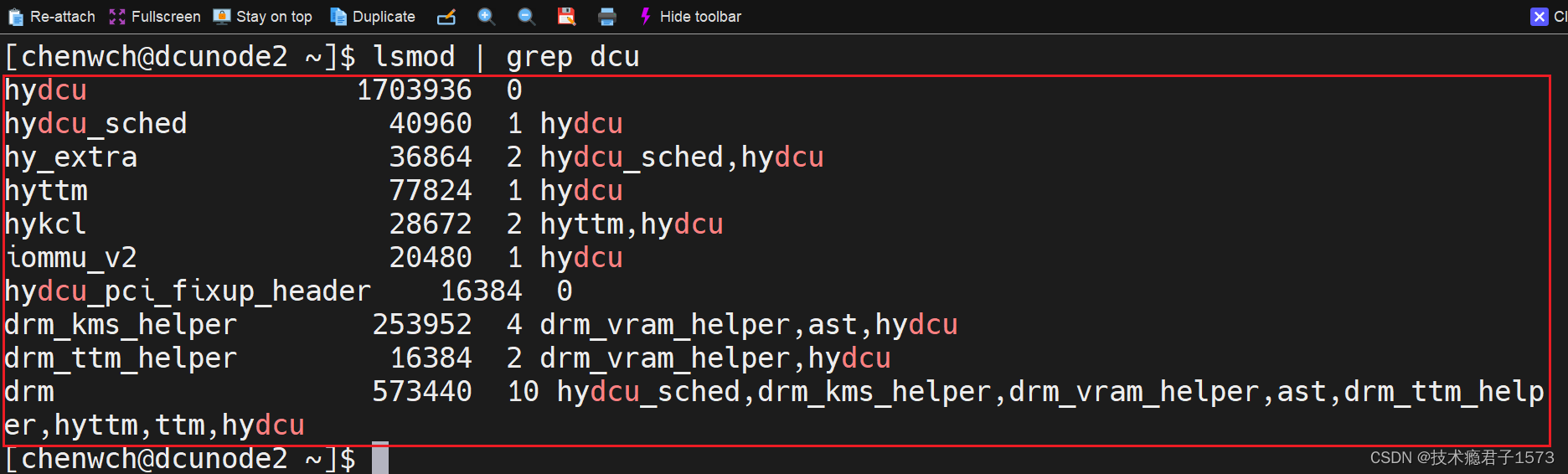
验证(问题排查2、3)
通过
lsmod | grep dcu命令验证驱动是否安装成功,如图所示:
➡deb系列系统(Ubuntu)
-
安装驱动依赖包
apt update \ && apt install -y \ cmake \ automake \ rpm \ gcc \ g++ \ autoconf \ linux-headers-`uname -r` -
获取驱动
注:可前往开发者社区→资源工具→驱动,获取latest驱动下载地址

-
安装驱动
注:卸载驱动请执行命令`apt-get remove rock`。*
chmod 755 rock*.run \ && ./rock*.run \ && reboot -
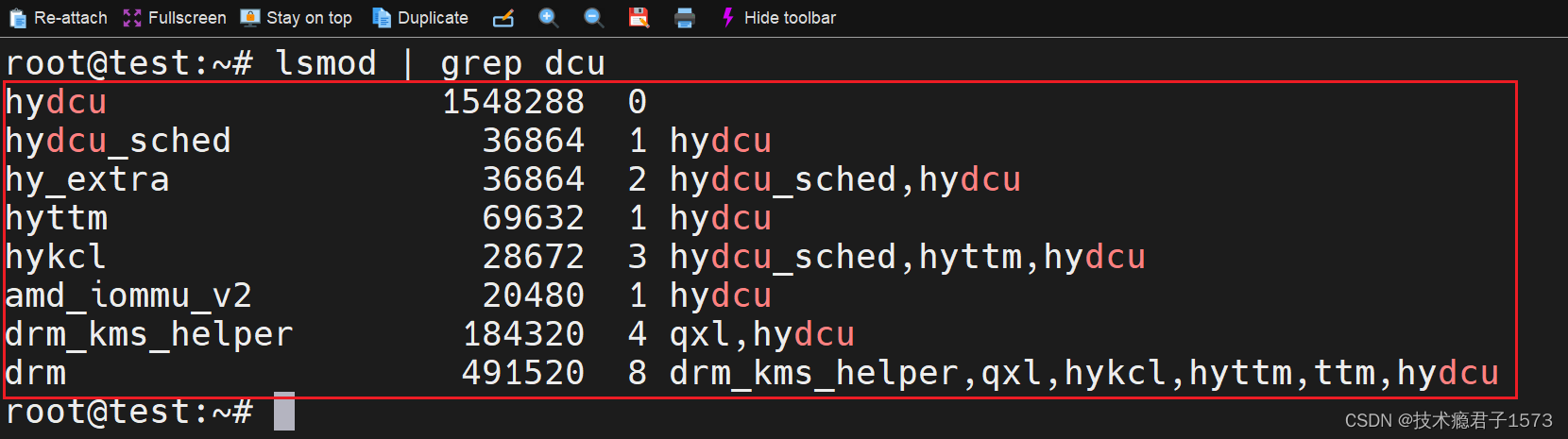
验证(问题排查2、3)
通过
lsmod | grep dcu命令验证驱动是否安装成功,如图所示:
第三步:环境部署
注:非root用户请务必加入39组,才能正确调用DCU加速卡,通过命令usermod -a -G 39 $USER完成设置。
容器化部署方式(推荐)
➡rpm系列系统(CentOS,NFS,Anolis,Kylin,UOS,openEuler)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 6047
6047

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











