







NXP-1020-EVK学习(一)-下载例程
一、开发板:
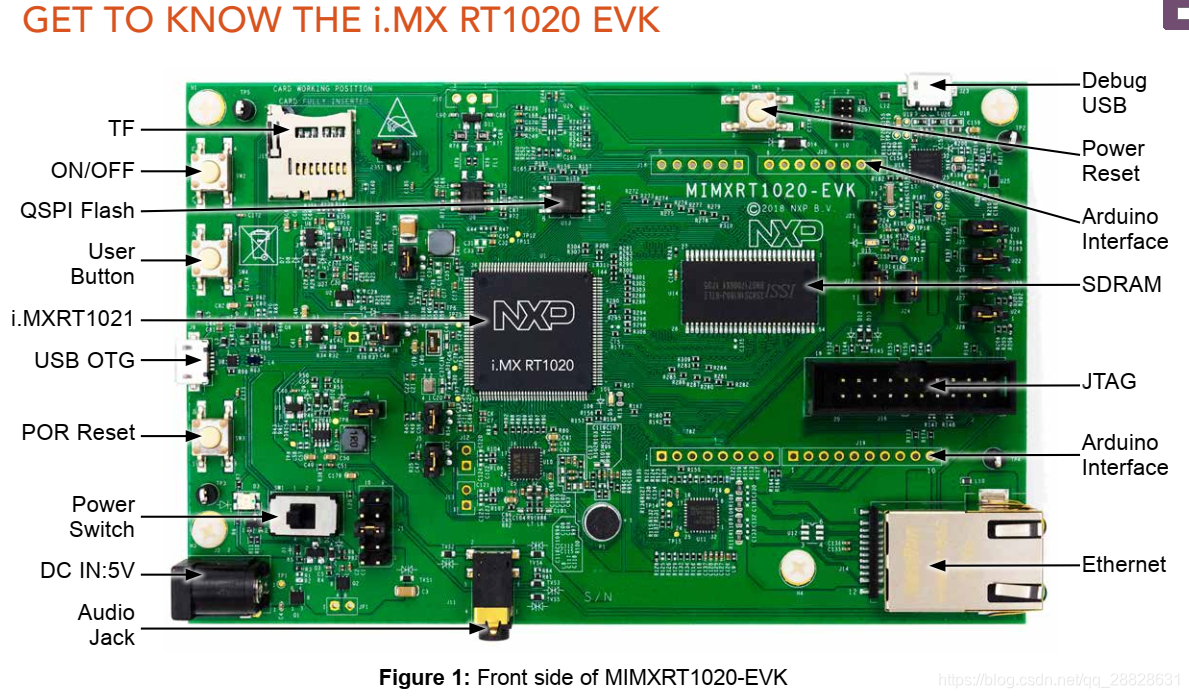
MIMXRT1020-EVK 官方评估板
正面:
居中的图片:
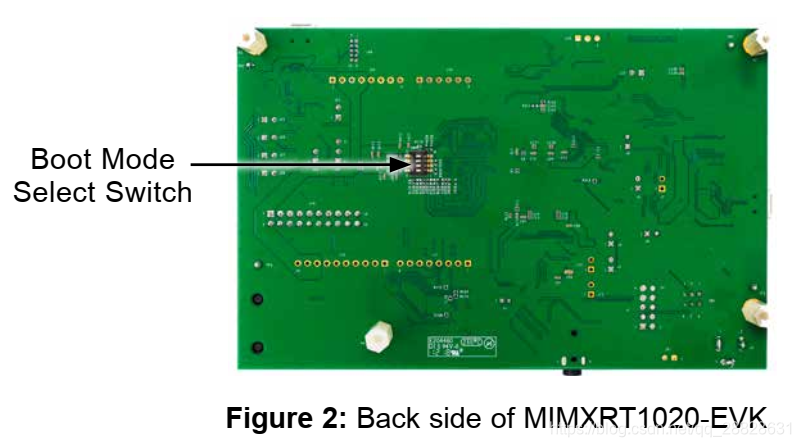
背面:
芯片说明:
二、下载踩的坑:
- 使用1052固件进行下载
1.拿到板后直接下载程序(导致识别不到芯片)
(1.)识别不到芯片
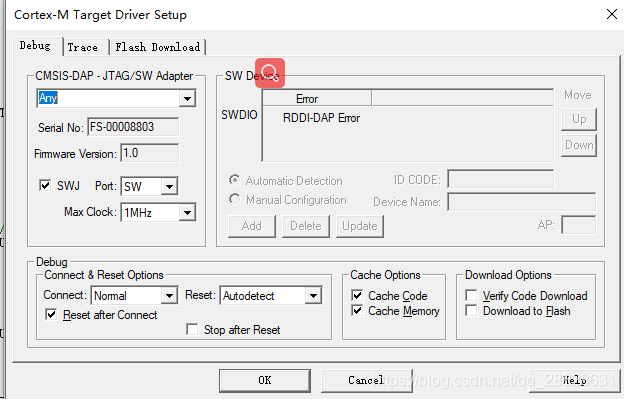
(2.)与芯片通信出错,未截图 2.下载报错 1.点击下载时ARM7报错 2.下载后读取出错 3.下载后不运行 解决方法: 1.查找电路图,找到BOOT0与BOOT1的配置方法,在背面off-off-ON-off BOOT3.3V供电,才可以成功识别板子。
NXP1020 下载方式
NXP 与常用的STM32不同,需要匹配开发板与之对应的下载算法。ST对应的是芯片的下载算法。
这和芯片的架构有区别, i.MX RT 系列芯片集成了应用处理器与为
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1113
1113

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









