







 文章介绍了如何使用Levenberg-Marquardt(LM)算法解决非线性最小二乘问题,以圆锥面拟合为例。通过定义误差方程和利用C++的Eigen库,实现了LM法的编程实现,包括计算误差和雅可比矩阵。最后展示了如何设置参数并执行优化过程来找到最佳拟合参数。
文章介绍了如何使用Levenberg-Marquardt(LM)算法解决非线性最小二乘问题,以圆锥面拟合为例。通过定义误差方程和利用C++的Eigen库,实现了LM法的编程实现,包括计算误差和雅可比矩阵。最后展示了如何设置参数并执行优化过程来找到最佳拟合参数。
LM解非线性最小二乘--以圆锥面拟合为例
圆锥面方程
此处我们将模型简化为一个中心轴始终与z轴平行的圆锥面,该圆锥面包括4个参数,分别为锥点坐标(a, b, c)和半顶角α。
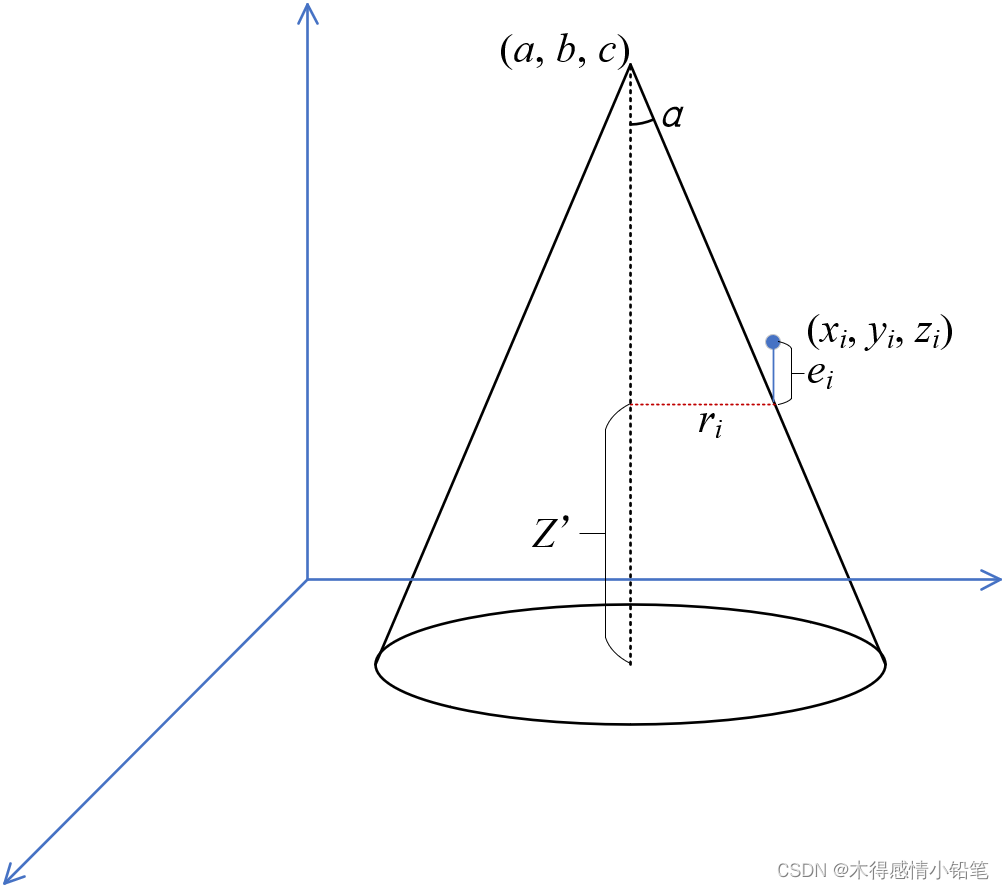
则圆锥面上一点对应的高程z’可表达为:
z
=
c
−
(
x
−
a
)
2
+
(
y
−
b
)
2
×
1
tan
α
.
z = c -\sqrt{\left (x-a \right )^{2}+\left (y-b \right )^{2}} \times \frac{1}{\tan \alpha } .
z=c−(x−a)2+(y−b)2×tanα1.
LM解非线性最小二乘
根据圆锥面方程,我们可以定义误差方程为:
r
i
=
z
i
−
c
+
(
x
i
−
a
)
2
+
(
y
i
−
b
)
2
×
1
tan
α
r_{i} = z_{i}- c +\sqrt{\left (x_{i} -a \right )^{2}+\left (y_{i} -b \right )^{2}} \times \frac{1}{\tan \alpha }
ri=zi−c+(xi−a)2+(yi−b)2×tanα1
显然这个误差方程是非线性的,要解这个方程有多种现成的方法,比如高斯牛顿法,Levenberg-Marquardt (LM)法等,这里我们采用最常用的LM法。
C++编程实现
第三方库:eigen
template<typename _Scalar, int NX = Eigen::Dynamic, int NY = Eigen::Dynamic>
struct Functor
{
typedef _Scalar Scalar;
enum {
InputsAtCompileTime = NX,
ValuesAtCompileTime = NY
};
typedef Eigen::Matrix<Scalar, InputsAtCompileTime, 1> InputType;
typedef Eigen::Matrix<Scalar, ValuesAtCompileTime, 1> ValueType;
typedef Eigen::Matrix<Scalar, ValuesAtCompileTime, InputsAtCompileTime> JacobianType;
int m_inputs, m_values;
Functor() : m_inputs(InputsAtCompileTime), m_values(ValuesAtCompileTime) {}
Functor(int inputs, int values) : m_inputs(inputs), m_values(values) {}
int inputs() const { return m_inputs; }
int values() const { return m_values; }
};
//构建LM函数
struct LMFunctor : Functor<float> {
private:
std::vector<Vec3> mVec; // Data points to fit.
int mSize; // Number of data points, i.e. values.
public:
// Set the number of data points
void setValues(std::vector<Vec3> vec)
{
mVec = vec;
mSize = vec.size();
}
// Compute 'm' errors, one for each data point, for the given parameter values in 'x'
int operator()(const Eigen::VectorXf& x, Eigen::VectorXf& fvec) const
{
// 'x' has dimensions n x 1
// It contains the current estimates for the parameters.
// 'fvec' has dimensions m x 1
// It will contain the error for each data point.
float a = x(0);
float b = x(1);
float c = x(2);
float d = x(3);
for (int i = 0; i < values(); i++) {
float x = mVec[i].f[0];
float y = mVec[i].f[1];
float z = mVec[i].f[2];
fvec(i) = z - c + std::sqrt((x - a) * (x - a) + (y - b) * (y - b)) / std::tan(d);
}
return 0;
}
// Compute the jacobian of the errors
int df(const Eigen::VectorXf& x, Eigen::MatrixXf& fjac) const
{
// 'x' has dimensions n x 1
// It contains the current estimates for the parameters.
// 'fjac' has dimensions m x n
// It will contain the jacobian of the errors, calculated numerically in this case.
float epsilon;
epsilon = 1e-5f;
for (int i = 0; i < x.size(); i++) {
Eigen::VectorXf xPlus(x);
xPlus(i) += epsilon;
Eigen::VectorXf xMinus(x);
xMinus(i) -= epsilon;
Eigen::VectorXf fvecPlus(values());
operator()(xPlus, fvecPlus);
Eigen::VectorXf fvecMinus(values());
operator()(xMinus, fvecMinus);
Eigen::VectorXf fvecDiff(values());
fvecDiff = (fvecPlus - fvecMinus) / (2.0f * epsilon);
fjac.block(0, i, values(), 1) = fvecDiff;
}
return 0;
}
// Returns 'mSize', the number of values.
int values() const { return mSize; }
};
其中jacobian矩阵的计算可以使用手动求导方法,也可以采用我给出的有限差分方法,如果对自己算的对不对没信心的话还是老实拷贝代码吧。
最后就是采用LM解方程了:
// 圆锥曲面的方程参数,表示为 (x0,y0,z0,alpha)
Eigen::VectorXf params = Eigen::VectorXf(4, 1);
LMFunctor functor;
functor.setValues(cloud); //cloud为待拟合数据
Eigen::NumericalDiff<LMFunctor> numDiff(functor);
Eigen::LevenbergMarquardt<Eigen::NumericalDiff<LMFunctor>, float> lm(numDiff);
lm.parameters.maxfev = 1000;
lm.parameters.xtol = 1.0e-10;
int ret = lm.minimize(params);
// 输出最优拟合参数
std::cout << "The optimal parameters are: " << params.transpose() << std::endl;
至此圆锥面拟合完成:


















 2867
2867

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











