








Ref: [1] [Sum and difference coarray based MIMO radar array optimization with its application for DOA estimation]
[2] Tse的“Fundamental wireless communications"中 第7章
在看论文的过程中,常用经典的信道S-V model如下
H
=
∑
l
=
1
L
α
l
a
r
(
θ
)
a
t
H
(
γ
)
\boldsymbol{H} = \sum_{l=1}^L \alpha_l \boldsymbol{a}_r(\theta) \boldsymbol{a}_t^H(\gamma)
H=l=1∑Lαlar(θ)atH(γ)
同时,也有文章是采用
H
=
∑
l
=
1
L
α
l
a
r
(
θ
)
a
t
T
(
γ
)
\boldsymbol{H} = \sum_{l=1}^L \alpha_l \boldsymbol{a}_r(\theta) \boldsymbol{a}_t^T(\gamma)
H=l=1∑Lαlar(θ)atT(γ)
一个是共轭转置,一个是转置。采用conjugate transpose的信道模型在数学上有很多方便,但到底哪个才符合实际情况呢?这个问题困扰了我很久,最近终于有结论了。
实际中应该是transpose,而非 conjugated transponse。这一点得到了Emil教授的回复。
原因如下:
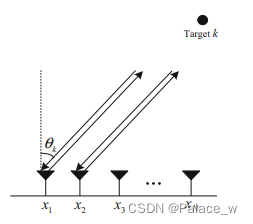
如图所示,在远场假设下,电磁波到达ULA不同阵列单元可以近似为平行,
x
1
x_1
x1和
x
2
x_2
x2的信号存在一个相位差, 而相位差是由距离差造成的,假设x1和x2之间的距离为
d
d
d,论文中通常成为antenna spacing,以
x
1
x_1
x1为参考点, 相位为
0
0
0,
x
n
x_n
xn单元的距离差可以近似为
(
n
−
1
)
d
sin
(
θ
)
(n-1)d\sin(\theta)
(n−1)dsin(θ),而且
x
1
x_1
x1的信号走过的距离最长,所以
x
n
x_n
xn的相位要超前一些,
exp
(
j
2
π
(
n
−
1
)
d
sin
(
θ
)
λ
)
\exp( \frac{j2\pi (n-1)d \sin(\theta)}{\lambda})
exp(λj2π(n−1)dsin(θ))。 注意这里不管是发送信号到target 还是从target反射回来,走过的距离是一样的,从而不同单元之间的距离差也是一样的,从而相位是一样的,如果用conjugate transpose,对于相同的角度
θ
\theta
θ, 发送和接收相位就会相反,这跟实际情况是不同的,所以应该是transpose.
那第二个问题就来了,为什么论文中很多都用conjugate transpose呢?或者问,在什么情况下是等价的呢?
为了讲清楚这个问题,我们首先要引入坐标系
以
x
1
x_1
x1为原点
p
0
=
[
0
,
0
,
0
]
T
\boldsymbol{p}_0 = [0,0,0]^T
p0=[0,0,0]T,
x
1
→
x
n
x_1\rightarrow x_n
x1→xn的方向为
x
x
x轴, 以朝向上方与
x
x
x轴定为
y
y
y轴的正方向,设target在该坐标系下的坐标为
p
=
[
p
x
,
p
y
]
T
\boldsymbol{p}=[p_x,p_y]^T
p=[px,py]T,则
- 当天线作为 transmit antenna的时候,方向矢量, k ≜ p − p 0 ∥ p − p 0 ∥ \boldsymbol{k} \triangleq \frac{\boldsymbol{p} - \boldsymbol{p}_0}{ \| \boldsymbol{p} - \boldsymbol{p}_0 \| } k≜∥p−p0∥p−p0, 则角度 θ t ≜ cos − 1 ( k T e y ) \theta_t \triangleq \cos^{-1} {( \boldsymbol{k}^T \boldsymbol{e}_y}) θt≜cos−1(kTey), 其中 e y = [ 0 , 1 ] T \boldsymbol{e}_y = [0,1]^T ey=[0,1]T
- 当天线作为 receive antenna的时候,方向矢量, k ≜ p 0 − p ∥ p 0 − p ∥ \boldsymbol{k} \triangleq \frac{\boldsymbol{p}_0 - \boldsymbol{p}}{ \| \boldsymbol{p}_0 - \boldsymbol{p} \| } k≜∥p0−p∥p0−p, 则角度 θ r ≜ cos − 1 ( k T e y ) \theta_r \triangleq \cos^{-1} {( \boldsymbol{k}^T \boldsymbol{e}_y)} θr≜cos−1(kTey).
角度的定义都是一样的,由此可见,当我们讨论路径的时候,要固定好参考系,
这个问题对于收发不共址的情况影响不大,因为可以自己选择reference point和参考系,但对于full-duplex antenna或者 upling/downlink reciprocity的时候,就很让人迷惑。















 1333
1333











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









