







代码来自www.opencvchina.com
#include "cv.h"
#include "highgui.h"
#include "cxcore.h"
#include <stdlib.h>
#include <stdio.h>
#ifndef LINESDISHEADER
#define LINESDISHEADER
//对输入图像进行细化
void ThinImage(IplImage* src, IplImage* dst, int iterations=1);
//获取图像上的轮廓 坐标
void GetContoursPoints(IplImage* src , CvMat** LinePoints);
#endif
#include "LinesDis.h"
//对输入图像进行细化
void ThinImage(IplImage* src, IplImage* dst, int iterations)
{
CvSize size = cvGetSize(src);
cvCopy(src, dst);//拷贝一个数组给另一个数组
int n = 0,i = 0,j = 0;
for(n=0; n<iterations; n++)
{
IplImage* t_image;
t_image = cvCloneImage(dst);
for(i=0; i<size.height; i++)
{
for(int j=0; j<size.width; j++)
{
if(CV_IMAGE_ELEM(t_image,byte,i,j)==1)
{
int ap=0;
int p2 = (i==0)?0:CV_IMAGE_ELEM(t_image,byte, i-1, j);
int p3 = (i==0 || j==size.width-1)?0:CV_IMAGE_ELEM(t_image,byte, i-1, j+1);
if (p2==0 && p3==1)
{
ap++;
}
int p4 = (j==size.width-1)?0:CV_IMAGE_ELEM(t_image,byte,i,j+1);
if(p3==0 && p4==1)
{
ap++;
}
int p5 = (i==size.height-1 || j==size.width-1)?0:CV_IMAGE_ELEM(t_image,byte,i+1,j+1);
if(p4==0 && p5==1)
{
ap++;
}
int p6 = (i==size.height-1)?0:CV_IMAGE_ELEM(t_image,byte,i+1,j);
if(p5==0 && p6==1)
{
ap++;
}
int p7 = (i==size.height-1 || j==0)?0:CV_IMAGE_ELEM(t_image,byte,i+1,j-1);
if(p6==0 && p7==1)
{
ap++;
}
int p8 = (j==0)?0:CV_IMAGE_ELEM(t_image,byte,i,j-1);
if(p7==0 && p8==1)
{
ap++;
}
int p9 = (i==0 || j==0)?0:CV_IMAGE_ELEM(t_image,byte,i-1,j-1);
if(p8==0 && p9==1)
{
ap++;
}
if(p9==0 && p2==1)
{
ap++;
}
if((p2+p3+p4+p5+p6+p7+p8+p9)>1 && (p2+p3+p4+p5+p6+p7+p8+p9)<7)
{
if(ap==1)
{
if(p2*p4*p8==0)
{
if(p2*p6*p8==0)
{
CV_IMAGE_ELEM(dst, byte,i,j)=0;
}
}
}
}
}
}
}
cvReleaseImage(&t_image);
}
//将二值图像转换成灰度,以便显示
i = 0;j = 0;
size = cvGetSize(dst);
for(i=0; i<size.height; i++)
{
for(j=0; j<size.width; j++)
{
if(CV_IMAGE_ELEM(dst,uchar,i,j)==1)
{
CV_IMAGE_ELEM(dst,uchar,i,j) = 255;
}
else
{
CV_IMAGE_ELEM(dst,uchar,i,j) = 0;
}
}
}
}
//获取图像上的轮廓 坐标
void GetContoursPoints(IplImage* src , CvMat** LinePoints)
{
CvMemStorage* storage = cvCreateMemStorage(0);
CvSeq* contour = 0;
IplImage* binary_image = cvCreateImage(cvGetSize(src),8,1);
cvCopy(src,binary_image);
cvFindContours(binary_image , storage , &contour , sizeof(CvContour) , CV_RETR_CCOMP,CV_CHAIN_APPROX_NONE,cvPoint(0,0) );
//#define SHOWCON
#ifdef SHOWCON
IplImage* contours;
contours = cvCreateImage(cvGetSize(src),8,1);
cvZero(contours);
cvNamedWindow("con");
#endif
int LinesCount = 0;
for(;contour!=0 ; contour=contour->h_next)
{
if(contour->total < 20 )continue;
LinePoints[LinesCount] = cvCreateMat(contour->total/8,1,CV_32FC2);
for(int i=0; i<contour->total/8 ; i++)
{
CvPoint * pt = (CvPoint*)cvGetSeqElem(contour, i); // 读出第i个点。
cvSet2D(LinePoints[LinesCount] , i,0,cvScalar(pt->x,src->height - pt->y,0,0));
//cvSetReal2D(contours , pt->y , pt->x , 255.0);
#ifdef SHOWCON
CvScalar val = cvGet2D(LinePoints[LinesCount] , i, 0);
cvSetReal2D(contours , val.val[1] ,val.val[0],255);
cvShowImage("con" ,contours);
cvWaitKey(0);
#endif
}
LinesCount++;
}
#ifdef SHOWCON
for(int i=0;i<LinesCount;i++)
{
for(int y=0;y<LinePoints[i]->rows;y++)
{
CvScalar pt = cvGet2D(LinePoints[i] , y, 0);
cvSetReal2D(contours , pt.val[1] ,pt.val[0],255);
printf("(%f,%f) ",pt.val[0],pt.val[1]);
}
}
cvShowImage("con" ,contours);
cvWaitKey(0);
#endif
cvReleaseMemStorage(&storage);
cvReleaseImage(&binary_image);
}
// ComputeLinesDis.cpp : Defines the entry point for the console application.
//
#include "LinesDis.h"
int main(int argc, char* argv[])
{
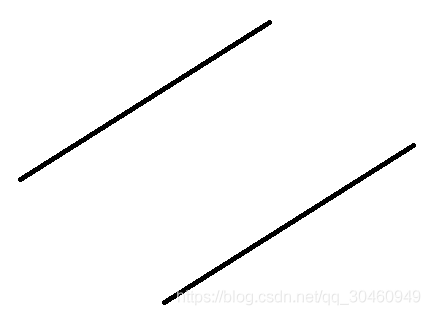
//对两条直线进行细化
IplImage *pSrc = NULL,*pDst = NULL,*pTmp = NULL;
//传入一个灰度图像,从文件中读取图像
pSrc = cvLoadImage("1.png",CV_LOAD_IMAGE_GRAYSCALE);
if(!pSrc)
{
return 0;
}
pTmp = cvCreateImage(cvGetSize(pSrc),pSrc->depth , pSrc->nChannels);
pDst = cvCreateImage(cvGetSize(pSrc),pSrc->depth,pSrc->nChannels);
cvZero(pDst);//初始化
cvThreshold(pSrc,pTmp,128,1,CV_THRESH_BINARY_INV);//做二值处理,将图像转换成0,1
//第一步 对图像中的直线进行细化
ThinImage(pTmp,pDst,80);
#define SHOWRESULT
#ifdef SHOWRESULT
cvNamedWindow("src",1);//创建窗口
cvNamedWindow("dst",1);
cvShowImage("src",pSrc);
cvShowImage("dst",pDst);
#endif
//第二步 提取直线的轮廓坐标
CvMat*LinesPoints[2];
LinesPoints[0]=0;LinesPoints[1]=0;
GetContoursPoints(pDst,LinesPoints);
//#define SHOWCONT
#ifdef SHOWCONT
IplImage* contours = cvCreateImage(cvGetSize(pDst),8,1);
cvZero(contours);
cvNamedWindow("Mcon");
for(int i=0;i<2;i++)
{
for(int y=0;y<LinesPoints[i]->rows;y++)
{
CvScalar pt = cvGet2D(LinesPoints[i] , y, 0);
cvSetReal2D(contours , pt.val[1] ,pt.val[0],255);
cvShowImage("Mcon" ,contours);
}
}
cvWaitKey(0);
#endif
//第三步 对轮廓上的坐标进行直线拟合 计算直线方程 By = Ax + b
float params[4] , k[2] , b[2] , A , B;
cvFitLine(LinesPoints[0] , CV_DIST_L2,1,0.001,0.001,params);
k[0] = params[1]/params[0];
b[0] = params[3] - k[0]*params[2];
A = k[0];
B = 1;
printf("y=%f*x+%f \n",k[0]*180.0/3.1415,b[0]);
cvFitLine(LinesPoints[1] , CV_DIST_L2,1,0.001,0.001,params);
k[1] = params[1]/params[0];
b[1] = params[3] - k[0]*params[2];
printf("y=%f*x+%f \n",k[1]*180.0/3.1415,b[1]);
//第四部 计算两条直线之间的距离 公式是: |b1-b0| / sqrt(A*A + B*B)
float dis = abs(b[1]-b[0])/sqrt(A*A + B*B);
printf("dis is %f \n" , dis);
// 释放内存
cvReleaseImage(&pSrc);
cvReleaseImage(&pDst);
cvReleaseImage(&pTmp);
if(LinesPoints[0])
cvReleaseMat(&LinesPoints[0]);
if(LinesPoints[1]);
cvReleaseMat(&LinesPoints[1]);
cvWaitKey(0);
return 0;
}














 9852
9852











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









