







Cesium的HeadingPitchRoll
对于模型旋转变换、相机视角变换以及方向变换的处理操作,也就是改变heading、pitch、roll这三个的值
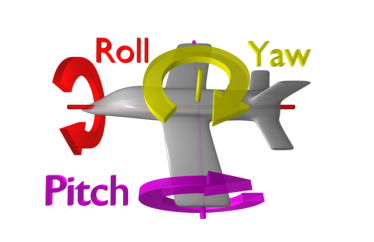
HeadingPitchRoll其实也就是欧拉(Euler)角 :yaw、pitch、roll
Heading值
偏航角ψ(Heading)的值,是控制机体头的朝向位置,这个角的改变,也就是左右方向的改变
Pitch值
俯仰角的值,从上图来看是控制机体上下方向的改变,值为正是顺时针旋转;为负则相反。当然,这个是根据坐标轴来旋转的,要是进行了翻滚就不一定是上下旋转了;如果还将头朝向的方向看作前方,其实还是可以看作上下旋转的
Roll值
翻滚角, 假如头始终朝着前方看,然后进行侧空翻,翻滚完成也就是旋转了360度。
HeadingPitchRange
HeadingPitchRange与HeadingPitchRoll是类似的,其中Range代表一个半径值















 1093
1093











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









