







目录
Apollo主要组成
apollo 主要包括参考车辆平台、参考硬件平台、开源软件平台、云服务平台;
其中的主要模块为:高精地图、定位、感知、预测、规划、控制(PNC);
⾼精地图⼏乎⽀持着软件栈的所有其他模块,尤其是定位、感知、规划和决策;
在定位中,我们将讨论⻋辆如何确认所在位置。⻋辆利⽤激光和雷达数据将这些传感器感知内容与⾼分辨率地图进⾏对⽐,这种对⽐使⻋辆能够以个位数厘⽶级精度进⾏定位。
Apollo五个核心部件
计算机视觉、传感器融合、定位、路径规划和控制(PNC)
我们使⽤计算机视觉和传感器融合,获取⼀幅关于我们在世界上的位置的丰富画⾯,使⽤定位确定我们在这个世界的精确位置,然后使⽤路径规划来绘制⼀条通过这个世界到达⽬的地的路径,通过控制转动⽅向盘、打开油⻔、然后踩制动器,沿着该轨迹⾏驶并最终移动⻋辆。从本质上讲,其他⼀切⽆⼈⻋都是这些核⼼功能更复杂的实现。
Apollo开放式软件栈
Apollo开放式软件层分为三个⼦层,分别是基于ubuntu 的实时操作系统、参考ROS的cyberRT 调度框架、业务模块。
实时操作系统(RTOS),可确保在给定时间内完成特定任务,“实时”是指⽆⼈⻋的操作系统,能够
及时进⾏计算,分析并执⾏相应的操作,是在⻋辆传感器收集到外界数据后的短时间内完成的。实时性能是确保系统稳定性和驾驶安全性的重要要求。
Apollo RTOS是Ubuntu Linux操作系统与Apollo内核相互结合的成果。原始Ubuntu系统并⾮实时操作系统,通过加⼊Apollo设计的内核,我们可以使其成为⼀个RTOS。
运⾏时框架cyberRT是Apollo的操作环境,是ROS的定制版即机器⼈操作系统。为了使ROS适应⽆⼈⻋,
Apollo团队改进了共享内存的功能和性能、去中⼼化和数据兼容性。
Apollo软件平台具有各种模块,这些模块包括 MAP引擎、定位、感知、规划、控制、端到端驾驶以及
⼈机接⼝(HMI)。每个模块都有⾃⼰的算法库,之间的关系也⾮常复杂
高精地图
基本概念
高精地图是当前无人驾驶车技术不可或缺的一部分。它包含了大量的驾驶辅助信息,最重要是包含道路网的精确三维表征,例如交叉路口布局和路标位置。
高精地图还包含很多语义信息,地图上可能会报告交通灯不同颜色的含义,也可能指示道路的速度限制,及左转车道开始的位置。
高精地图最重要特征之一是精度,手机上的导航地图只能达到米级精度,而高精地图可以使车辆
能够达到厘米级的精度,这对确保无人车的安全性至关重要。
与定位、感知和规划的关系
定位
高精地图是Apollo平台的核心,许多无人驾驶车模块都有赖于高精地图,有了高精地图我们就需要在该地图上进行自定位。这意味,需要弄清我们在地图上的位置,这就是定位——无人驾驶车辆在地图上的确切位置。
首先车辆可能会寻找地标,我们可以使用从各类传感器收集的数据,如摄像机图像数据、激光雷
达收集的三维点云数据来查找地标。车辆将其收集的数据与其在高精地图上的已知地标进行比
较,这一匹配过程是需要预处理、坐标转换、数据融合的复杂过程。
感知
无人车也可以使用高精地图来帮助感知,就像人的眼睛和耳朵会受到环境因素的影响一样,无人
车的传感器也是如此。摄像机、激光雷达、雷达探测物体的能力,在超过一定距离后都会受到限
制。在恶劣的天气条件下或在夜间,传感器识别障碍物的能力可能会受到进一步限制。另外当车
辆遇到障碍物时,传感器无法透过障碍物来确定障碍物后面的物体。这时,就需要借助高精地图
的帮助了。
即使传感器尚未检测到交通信号灯,高精地图也可以将交通信号灯的位置提供给软件栈的其余部
分,帮助车辆做下一个决策。
另一个好处在于,高精地图可帮助传感器缩小检测范围,如高精地图可能会告知我们在特定位置
寻找停车标志,传感器就可以集中在该位置检测停车标志,被称为感兴趣区域ROI。ROI可帮助
我们提高检测精确度和速度,并节约计算资源。
规划
正如定位和感知依赖高精地图那样,规划也是如此。高精地图可帮助车辆找到合适的行车空间,
还可以帮助规划器确定不同的路线选择,来帮助预测模块预测道路上其他车辆将来的位置。
Apollo 高精地图的构建
Apollo高精地图专为无人车设计,里面包含了道路定义、交叉路口、交通信号、车道规则,及
用于汽车导航的其他元素。
高精度地图可在许多方面为无人车提供帮助,如高精度地图通常会记录交通信号灯的精确位置和
高度,从而大大降低了感知难度。
高精地图不仅可以减少计算需求,还可以通过提供有关驾驶环境的详细信息,来确保无人车的安
全。保持这些地图的更新是一项重大任务,测试车队需要不断地对高精度地图进行验证和更新。
此外,这些地图可能达到几厘米的精度,这是水准最高的制图精度。
高精地图有很多种格式,为了方便数据共享,Apollo高精地图采用了OpenDRIVE格式,这是一
种 行 业 制 图 标 准 。 同 时 , Apollo 也 对 OpenDRIVE 做 出 了 改 进 , 进 而 产 生 了
Apollo OpenDRIVE标准,以便更适合无人车。
构建
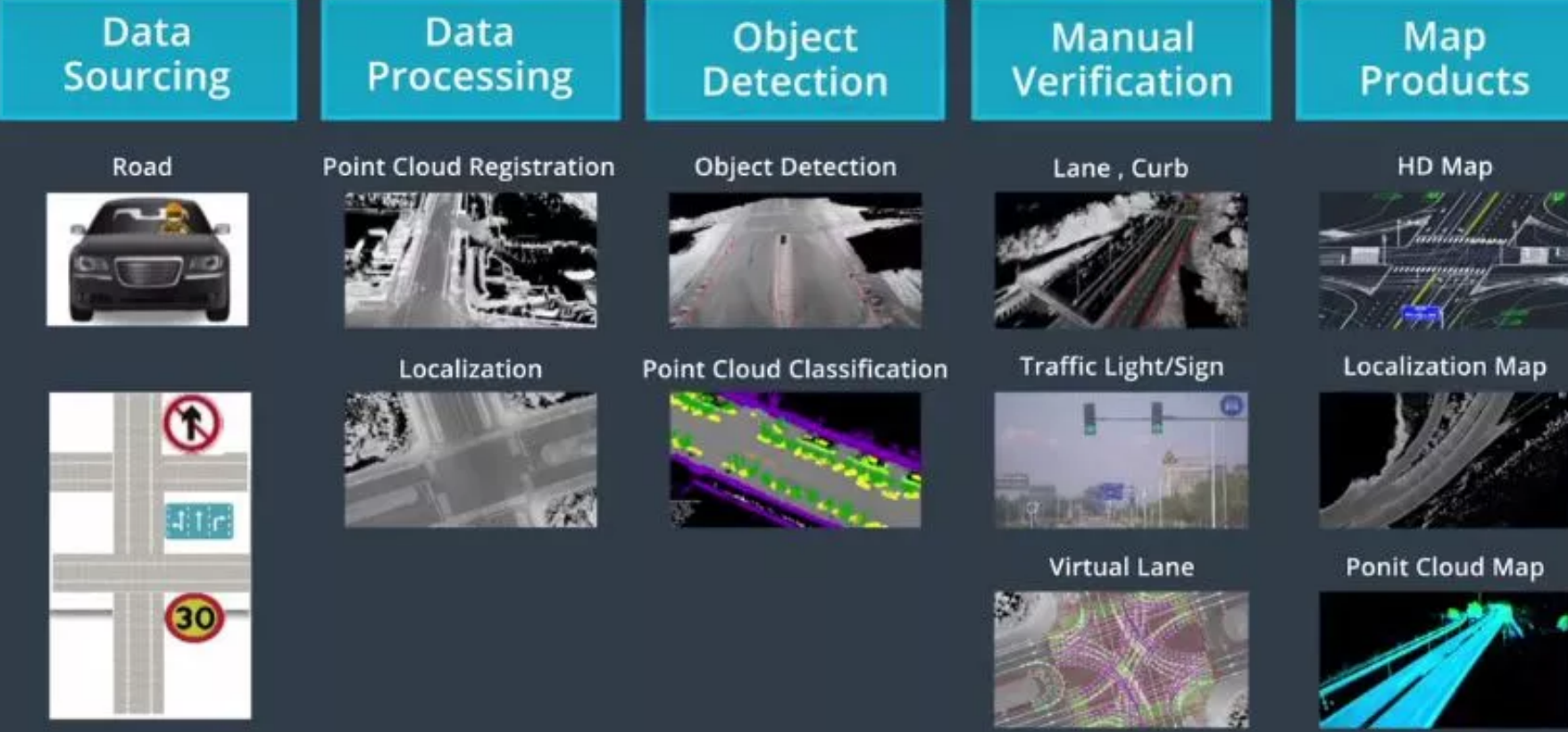
高精度地图的构建由五个过程组成:数据采集、数据处理、对象检测、手动验证、地图发布。
数据采集
近300辆Apollo测试车辆负责收集用于制作地图的源数据, 以便确保每次道路发生改变时,地图均会得到快速更新。测试车辆使用了多种传感器,如GPS、 IMU、激光雷达、摄像机。Apollo定义了一个硬件框架,将这些传感器集成到单个自主系统中,通过支持多种类的传感器,Apollo收集各类数据将这些数据融合,最终生成高精度地图。
数据处理
数据处理指的是Apollo如何对收集到的数据进行整理、分类和精简,以获得没有任何语义信息
或注释的初始地图模板。
对象检测
对象检测,Apollo使用人工智能来检测静态对象并对其进行分类,其中包括车道线、交通
标志、甚至是电线杆,手动验证可确保自动地图创建过程正确进行并及时发现问题。Apollo使
手动验证团队能够高效标记和编辑地图,在经过数据采集、数据处理、对象检测、手动验证之
后,高精地图才能发布。
除高精地图外,Apollo还发布了采用自上而下视图的相应定位地图、三维点云地图。
在构建和更新地图的过程中,Apollo使用众包向公众发布其数据采集工具,以便任何人都可以
参与制作高精度地图的任务,这加快了高精地图制作和维护的过程。

















 579
579











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











