









Object Detection
1.Object localization
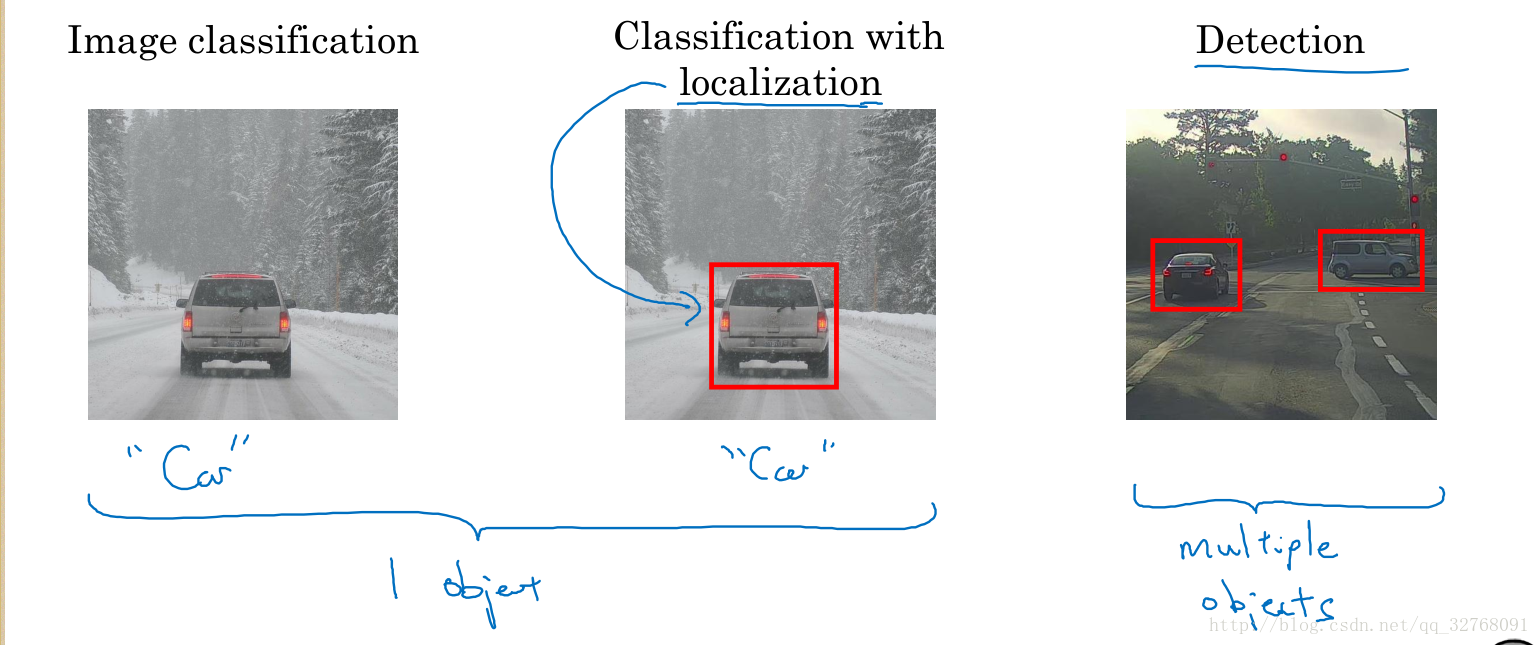
以前的分类问题经过softmax后输出其属于哪一类即可,对于目标定位,经过softmax后还得多输出其位置信息。
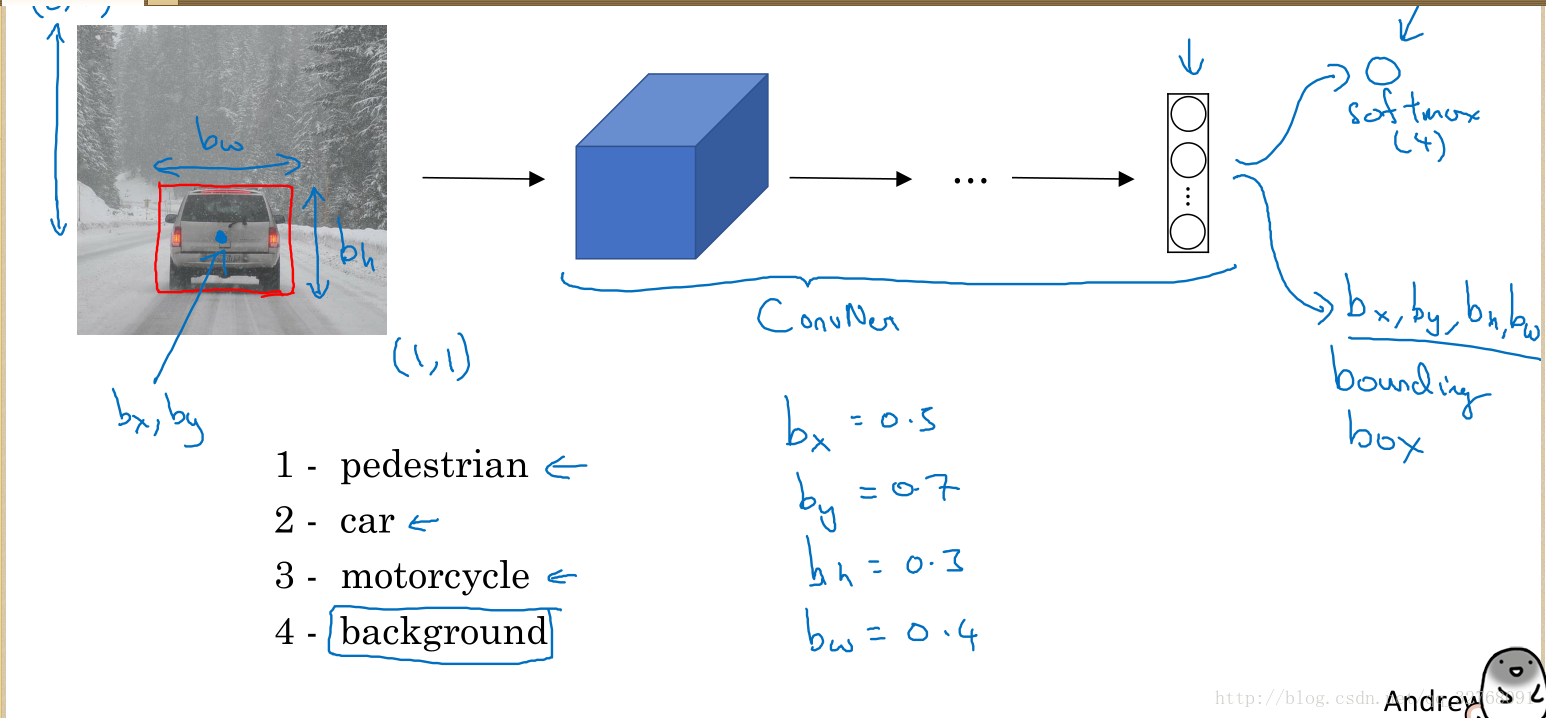
bx,by是位置,bw和bh是宽度和高度。
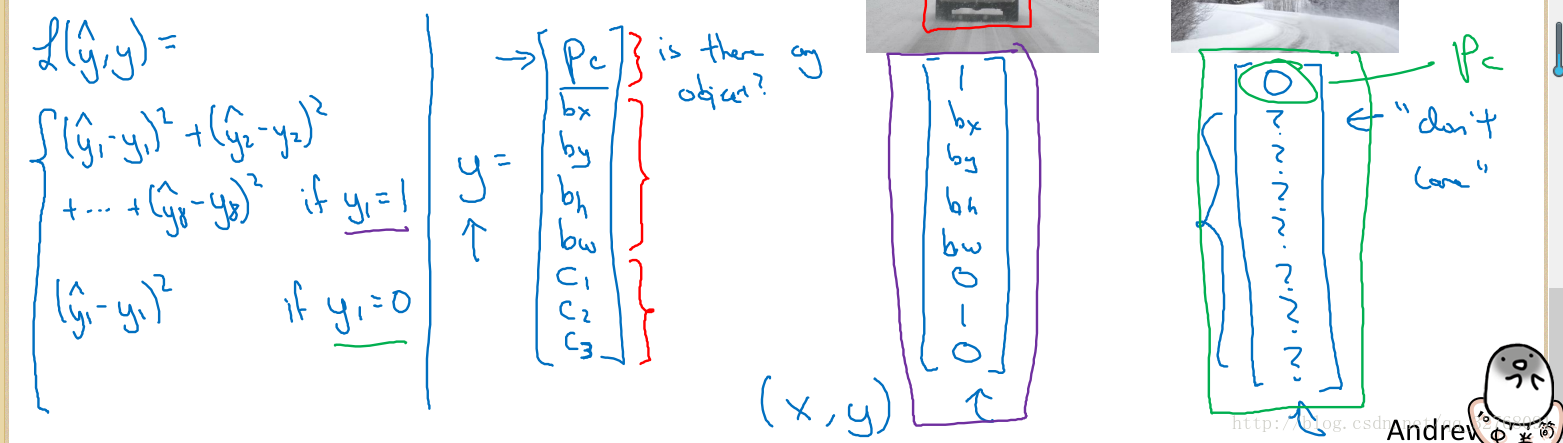
这里输出假设分类定位问题是只有一个对象,当图像中有目标时pc=1,列表中还会包含位置信息(bw,bh,bx,by),c1=1代表目标是pedestrain,c2=1代表目标是car,c3=1代表目标是motorcycle.当没有车时,当pc=0时说明目标不存在,其它参数这时就无意义了。
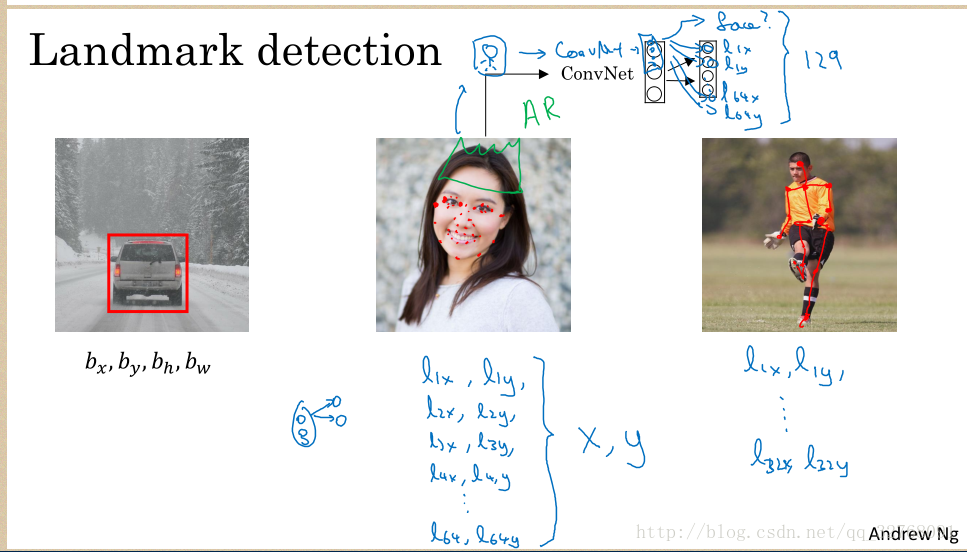
2 Landmark Detection
3.Convolutional implementation of sliding windows
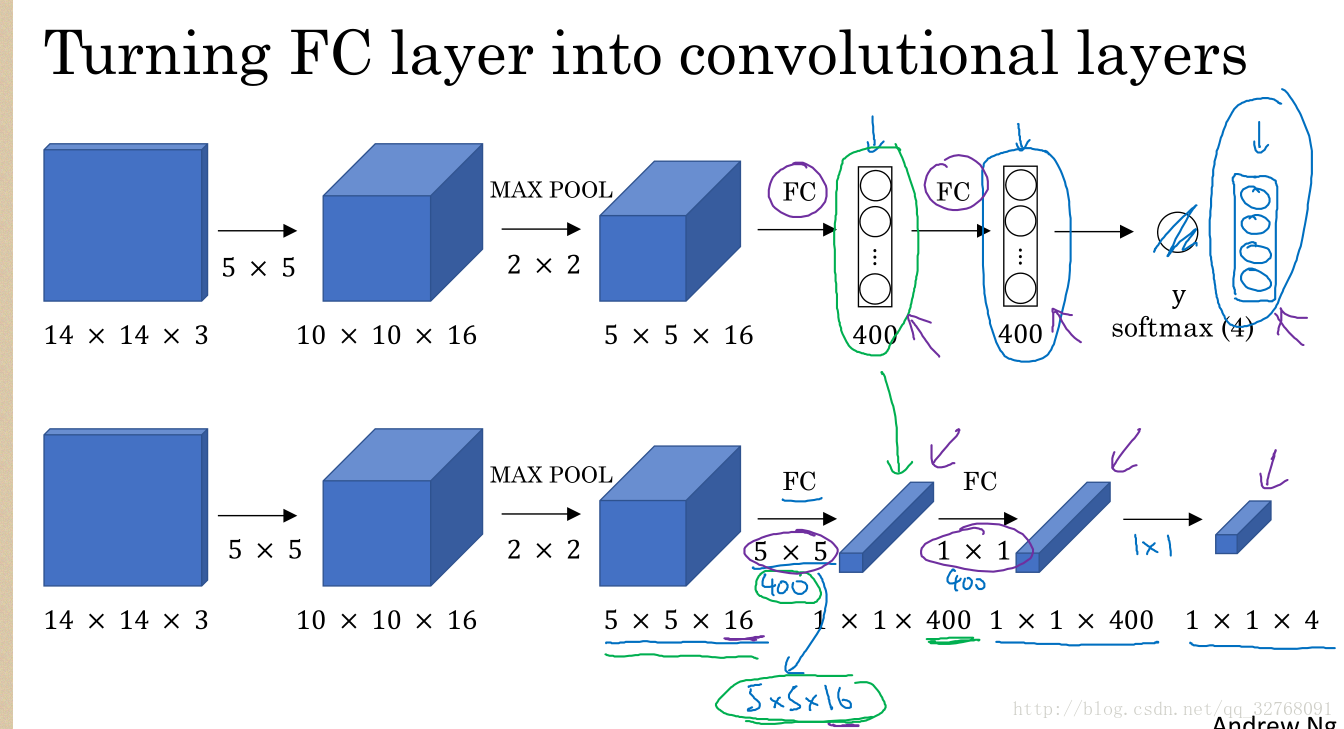
这里把全连接层用卷积层代替,在数学上效果一样。
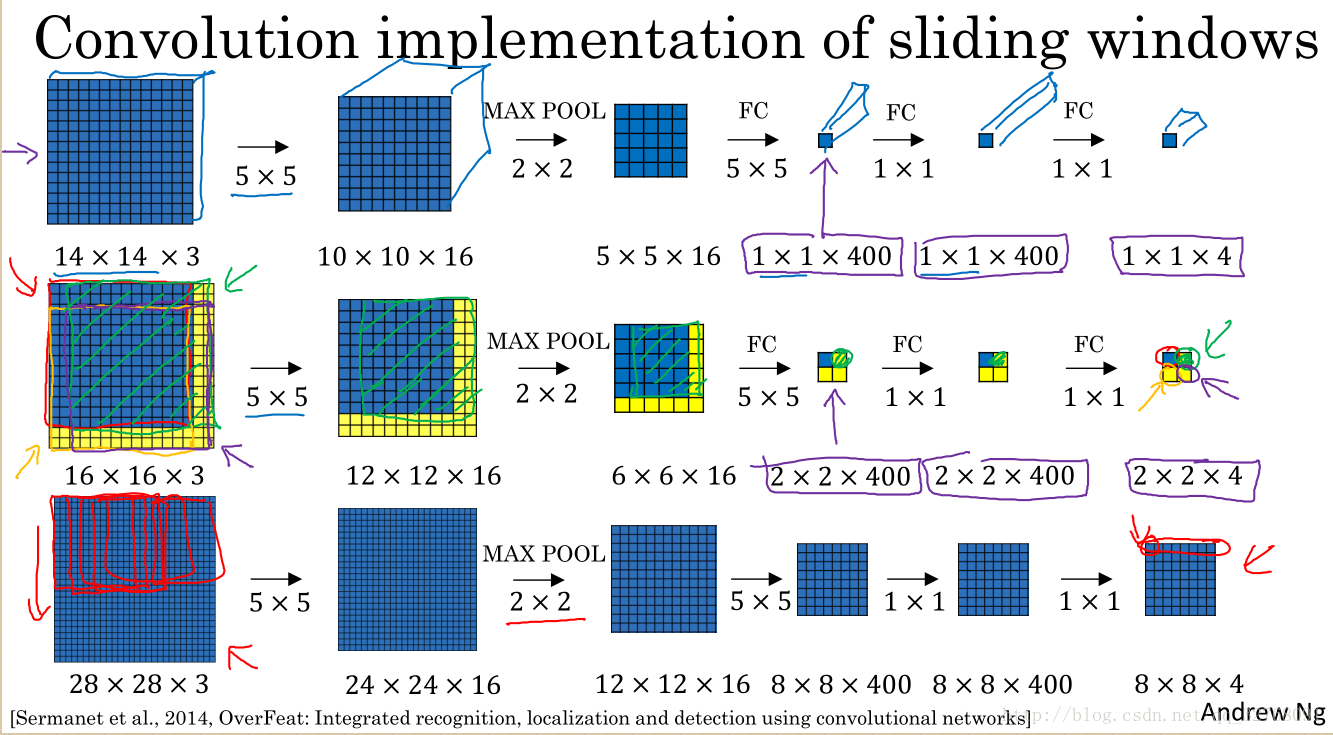
使用滑动窗口,不需要把输入图片分割成多个子集(传统的是把一张图片裁剪多块分别丢入卷积网路分析,效率较低,而且会有很多计算重复),分别执行前向传播,而是把整张图片输入,这样共有区域可以共享很多计算,一次性得到所有预测值。
4.Intersection over union
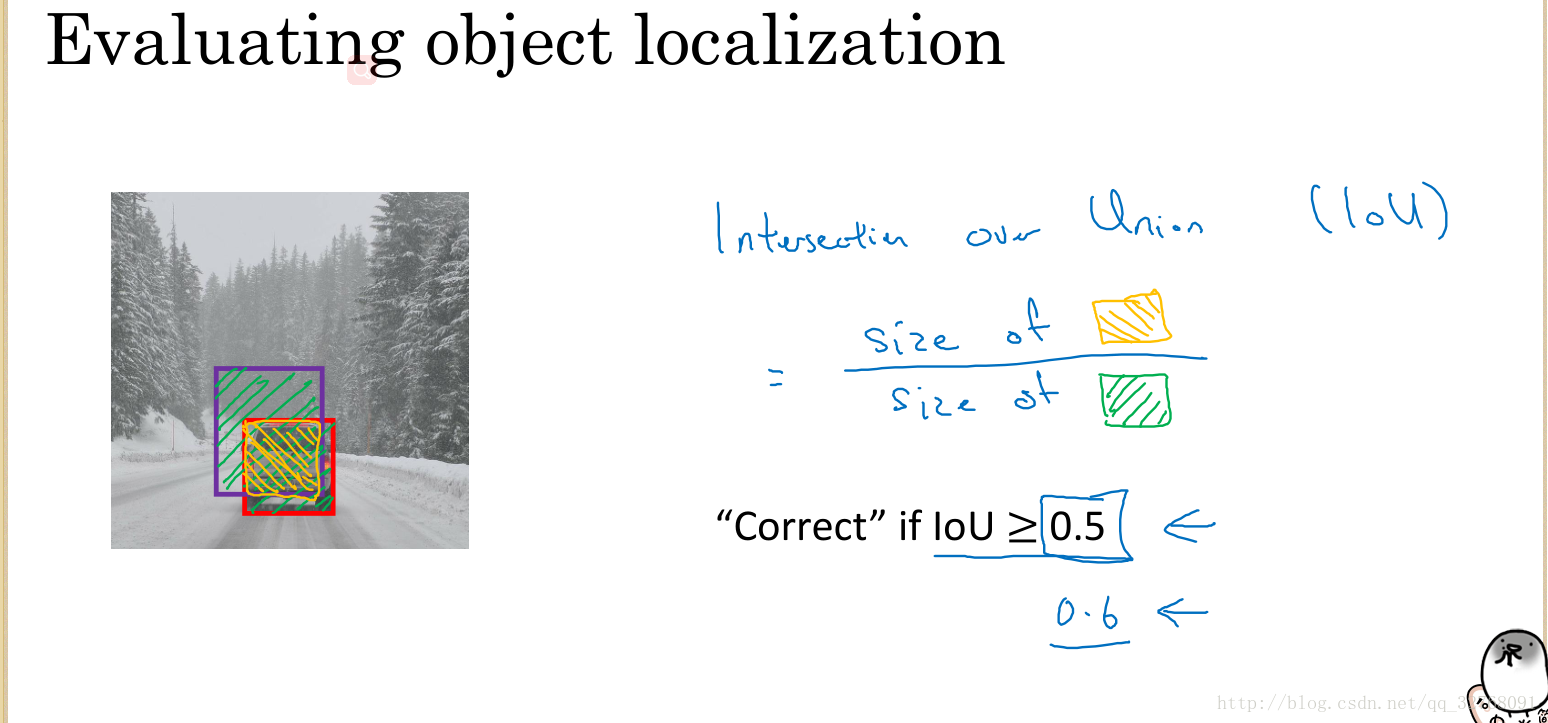
简单来说就是用交集初除上并集,衡量定位效果的。















 2018
2018

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









