







卷积神经网络中的即插即用模块
文章目录
0. 序言
版权声明:此份电子书整理自公众号「GiantPandaCV 」, 版权所有 GiantPandaCV , 禁止任何形式的 转载, 禁止传播、商用, 违者必究! GiantPandaCV 公众号由专注于技术的一群 90 后创建, 专注于机器学习、深度学习、计算机视觉、图 像处理等领域。半年以来已更新 242 篇原创技术文章。我们编写了 《从零开始学习YOLOv3》 、《从零开始学习SSD》 、《Faster R-CNN原理和代码讲解》 、《多目标跟踪快速入门》等系列原创电子书,关注后回复对应关键字即可免费领取。每天更新一到两篇相关推文, 希望在传播知识、分享知识的同时能够启发你。 欢迎扫描下方二维码关注我们的公众号。

1. 即插即用模块简介
即插即用模块一般是作为一个独立的模块,可以用于取代普通的卷积结构,或者直接插入网络结构中。
最常见的即插即用模块莫过于注意力模块了,近些年好多略显水的工作都用到了注意力模块,仅仅需要简单添加这些注意力模块即可作为论文的创新点,比如SENet+Darknet53组合。
虽然笔者觉得这些模块有些真的是用来水文章的,但是不可否认很多模块确实增强了模型的特征表达能力。具体使用和评判还需要各位在自己的实验中以批判的眼光看待。
《卷积神经网络中的即插即用模块》电子书中,笔者将对自己接触过的即插即用模块进行简单讲解,不涉及核心,如果对具体设计思路和原理感兴趣,可以去公众号找对应的文章或者直接看对应的论文。
这里的即插即用模块主要分为注意力模块和其他模块。由于笔者本身涉猎有限,不可能将所有的即插即用模块都总结进来,所以如果有补充的可以联系笔者(微信名片在下),笔者在空闲时间将不断维护这个即插即用模块的项目。
项目地址: [https://github.com/pprp/SimpleCVReproduction/tree/master/Plug-and-play%20module](https://github.com/pprp/SimpleCVReproduction/tree/master/Plug-and-play module)
 { width=50% }
{ width=50% }
一般来说,我们都很喜欢使用即插即用模块,因为其便于实现,可以快速验证,YOLOv4中就提到了大量的即插即用模块。不过这些即插即用模块不一定对所有的任务都有效,笔者和一些群友交流过注意力模块方面的实验,在YOLOv3上通常可以带来1个百分点左右的提升,但是更多情况下是没有任何提升。添加这类即插即用模块还需要注意几个问题:
-
插入的位置:有的模块适合插入在浅层,有的模块适合在深层。具体插在哪里最好看原作者论文中的插入位置作为参考。一般情况可以插入的常见位置有:
- 瓶颈层:比如ResNet,DenseNet的瓶颈层。
- 上采样层:比如FPN分支,Attention UNet。
- 骨干网络最后一层:比如SPP, ASPP等
- 所有的3x3卷积:比如深度可分离卷积等
-
插入后进行实验为何不生效?指标没有提高甚至降低?
很多模块虽然说是即插即用,但是并不是无脑插入以后结果就一定会提高。比如说,一个模型感受野已经很大,这时候如果在网络的浅层添加一些用于扩大感受野的模块,那样对结果不但不会有好的用处而且还会带来副作用。正确做法是,分析你网络的需要,根据需求选择对应功能的模块在合适的位置进行插入,如果没有明确合适的位置,那就需要通过实验进行分析,确定哪个位置效果更佳(IBN-Net中就是对不同位置使用IBN的结果进行了分析,最终确定了几种合适的方案)。
另外,通过和几位知友的讨论,得知这些注意力模块通常情况下都需要调参才能维持原本的准确率,在调参效果比较好的情况下才能超过原本的模型。
-
即插即用模块的作用(以下内容的一个到多个):
- 扩大模型感受野。
- 加快计算速度。
- 增加长距离依赖关系。
- 增加模型容量(参数量增加了一部分)
- 提升了模型特征表达的多样性。
2. 注意力模块
2.1 SENet

说明:最经典的通道注意力模块,曾夺最后一节ImageNet冠军。
论文:https://arxiv.org/pdf/1709.01507
代码:
import torch.nn as nn
class SELayer(nn.Module):
def __init__(self, channel, reduction=16):
super(SELayer, self).__init__()
self.avgpool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(channel, channel//reduction,bias=False),
nn.ReLU(inplace=True),
nn.Linear(channel//reduction,channel, bias=False),
nn.Sigmoid()
)
def forward(self, x):
b,c,h,w = x.size()
y = self.avgpool(x).view(b,c)
y = self.fc(y).view(b,c,1,1)
return x * y.expand_as(x)
2.2 SKNet

说明:SENet改进版,增加了多个分支,每个分支感受野不同。
论文:https://arxiv.org/pdf/1903.06586
代码:
import torch.nn as nn
import torch
class SKConv(nn.Module):
def __init__(self, features, WH, M, G, r, stride=1, L=32):
""" Constructor
Args:
features: input channel dimensionality.
WH: input spatial dimensionality, used for GAP kernel size.
M: the number of branchs.
G: num of convolution groups.
r: the radio for compute d, the length of z.
stride: stride, default 1.
L: the minimum dim of the vector z in paper, default 32.
"""
super(SKConv, self).__init__()
d = max(int(features / r), L)
self.M = M
self.features = features
self.convs = nn.ModuleList([])
for i in range(M):
self.convs.append(
nn.Sequential(
nn.Conv2d(features,
features,
kernel_size=3 + i * 2,
stride=stride,
padding=1 + i,
groups=G), nn.BatchNorm2d(features),
nn.ReLU(inplace=False)))
# self.gap = nn.AvgPool2d(int(WH/stride))
print("D:", d)
self.fc = nn.Linear(features, d)
self.fcs = nn.ModuleList([])
for i in range(M):
self.fcs.append(nn.Linear(d, features))
self.softmax = nn.Softmax(dim=1)
def forward(self, x):
for i, conv in enumerate(self.convs):
fea = conv(x).unsqueeze_(dim=1)
if i == 0:
feas = fea
else:
feas = torch.cat([feas, fea], dim=1)
fea_U = torch.sum(feas, dim=1)
fea_s = fea_U.mean(-1).mean(-1)
fea_z = self.fc(fea_s)
for i, fc in enumerate(self.fcs):
print(i, fea_z.shape)
vector = fc(fea_z).unsqueeze_(dim=1)
print(i, vector.shape)
if i == 0:
attention_vectors = vector
else:
attention_vectors = torch.cat([attention_vectors, vector],
dim=1)
attention_vectors = self.softmax(attention_vectors)
attention_vectors = attention_vectors.unsqueeze(-1).unsqueeze(-1)
fea_v = (feas * attention_vectors).sum(dim=1)
return fea_v
if __name__ == "__main__":
t = torch.ones((32, 256, 24,24))
sk = SKConv(256,WH=1,M=2,G=1,r=2)
out = sk(t)
print(out.shape)
2.3 scSE

说明:scSE分为两个模块,一个是sSE和cSE模块,分别是空间注意力和通道注意力,最终以相加的方式融合。论文中只将其使用在分割模型中,在很多图像分割比赛中都有用到这个模块作为trick。
论文:http://arxiv.org/pdf/1803.02579v2
代码:
import torch
import torch.nn as nn
class sSE(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.Conv1x1 = nn.Conv2d(in_channels, 1, kernel_size=1, bias=False)
self.norm = nn.Sigmoid()
def forward(self, U):
q = self.Conv1x1(U) # U:[bs,c,h,w] to q:[bs,1,h,w]
q = self.norm(q)
return U * q # 广播机制
class cSE(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.avgpool = nn.AdaptiveAvgPool2d(1)
self.Conv_Squeeze = nn.Conv2d(in_channels, in_channels // 2, kernel_size=1, bias=False)
self.Conv_Excitation = nn.Conv2d(in_channels//2, in_channels, kernel_size=1, bias=False)
self.norm = nn.Sigmoid()
def forward(self, U):
z = self.avgpool(U)# shape: [bs, c, h, w] to [bs, c, 1, 1]
z = self.Conv_Squeeze(z) # shape: [bs, c/2]
z = self.Conv_Excitation(z) # shape: [bs, c]
z = self.norm(z)
return U * z.expand_as(U)
class scSE(nn.Module):
def __init__(self, in_channels):
super().__init__()
self.cSE = cSE(in_channels)
self.sSE = sSE(in_channels)
def forward(self, U):
U_sse = self.sSE(U)
U_cse = self.cSE(U)
return U_cse+U_sse
if __name__ == "__main__":
bs, c, h, w = 10, 3, 64, 64
in_tensor = torch.ones(bs, c, h, w)
sc_se = scSE(c)
print("in shape:",in_tensor.shape)
out_tensor = sc_se(in_tensor)
print("out shape:", out_tensor.shape)
2.4 Non-Local Net

说明:NLNet主要借鉴了传统方法中的非局部均值滤波设计了Non-Local全局注意力,虽然效果好,但是计算量偏大,建议不要在底层网络使用,可以适当在高层网络中使用。
论文:https://arxiv.org/pdf/1711.07971
代码:
import torch
from torch import nn
from torch.nn import functional as F
class _NonLocalBlockND(nn.Module):
"""
调用过程
NONLocalBlock2D(in_channels=32),
super(NONLocalBlock2D, self).__init__(in_channels,
inter_channels=inter_channels,
dimension=2, sub_sample=sub_sample,
bn_layer=bn_layer)
"""
def __init__(self,
in_channels,
inter_channels=None,
dimension=3,
sub_sample=True,
bn_layer=True):
super(_NonLocalBlockND, self).__init__()
assert dimension in [1, 2, 3]
self.dimension = dimension
self.sub_sample = sub_sample
self.in_channels = in_channels
self.inter_channels = inter_channels
if self.inter_channels is None:
self.inter_channels = in_channels // 2
# 进行压缩得到channel个数
if self.inter_channels == 0:
self.inter_channels = 1
if dimension == 3:
conv_nd = nn.Conv3d
max_pool_layer = nn.MaxPool3d(kernel_size=(1, 2, 2))
bn = nn.BatchNorm3d
elif dimension == 2:
conv_nd = nn.Conv2d
max_pool_layer = nn.MaxPool2d(kernel_size=(2, 2))
bn = nn.BatchNorm2d
else:
conv_nd = nn.Conv1d
max_pool_layer = nn.MaxPool1d(kernel_size=(2))
bn = nn.BatchNorm1d
self.g = conv_nd(in_channels=self.in_channels,
out_channels=self.inter_channels,
kernel_size=1,
stride=1,
padding=0)
if bn_layer:
self.W = nn.Sequential(
conv_nd(in_channels=self.inter_channels,
out_channels=self.in_channels,
kernel_size=1,
stride=1,
padding=0), bn(self.in_channels))
nn.init.constant_(self.W[1].weight, 0)
nn.init.constant_(self.W[1].bias, 0)
else:
self.W = conv_nd(in_channels=self.inter_channels,
out_channels=self.in_channels,
kernel_size=1,
stride=1,
padding=0)
nn.init.constant_(self.W.weight, 0)
nn.init.constant_(self.W.bias, 0)
self.theta = conv_nd(in_channels=self.in_channels,
out_channels=self.inter_channels,
kernel_size=1,
stride=1,
padding=0)
self.phi = conv_nd(in_channels=self.in_channels,
out_channels=self.inter_channels,
kernel_size=1,
stride=1,
padding=0)
if sub_sample:
self.g = nn.Sequential(self.g, max_pool_layer)
self.phi = nn.Sequential(self.phi, max_pool_layer)
def forward(self, x):
'''
:param x: (b, c, h, w)
:return:
'''
batch_size = x.size(0)
g_x = self.g(x).view(batch_size, self.inter_channels, -1)#[bs, c, w*h]
g_x = g_x.permute(0, 2, 1)
theta_x = self.theta(x).view(batch_size, self.inter_channels, -1)
theta_x = theta_x.permute(0, 2, 1)
phi_x = self.phi(x).view(batch_size, self.inter_channels, -1)
f = torch.matmul(theta_x, phi_x)
print(f.shape)
f_div_C = F.softmax(f, dim=-1)
y = torch.matmul(f_div_C, g_x)
y = y.permute(0, 2, 1).contiguous()
y = y.view(batch_size, self.inter_channels, *x.size()[2:])
W_y = self.W(y)
z = W_y + x
return z
2.5 GCNet

说明:GCNet主要针对Non-Local 计算量过大的问题结合了提出了解决方案
论文:https://arxiv.org/abs/1904.11492
代码:
import torch
from torch import nn
class ContextBlock(nn.Module):
def __init__(self,inplanes,ratio,pooling_type='att',
fusion_types=('channel_add', )):
super(ContextBlock, self).__init__()
valid_fusion_types = ['channel_add', 'channel_mul']
assert pooling_type in ['avg', 'att']
assert isinstance(fusion_types, (list, tuple))
assert all([f in valid_fusion_types for f in fusion_types])
assert len(fusion_types) > 0, 'at least one fusion should be used'
self.inplanes = inplanes
self.ratio = ratio
self.planes = int(inplanes * ratio)
self.pooling_type = pooling_type
self.fusion_types = fusion_types
if pooling_type == 'att':
self.conv_mask = nn.Conv2d(inplanes, 1, kernel_size=1)
self.softmax = nn.Softmax(dim=2)
else:
self.avg_pool = nn.AdaptiveAvgPool2d(1)
if 'channel_add' in fusion_types:
self.channel_add_conv = nn.Sequential(
nn.Conv2d(self.inplanes, self.planes, kernel_size=1),
nn.LayerNorm([self.planes, 1, 1]),
nn.ReLU(inplace=True), # yapf: disable
nn.Conv2d(self.planes, self.inplanes, kernel_size=1))
else:
self.channel_add_conv = None
if 'channel_mul' in fusion_types:
self.channel_mul_conv = nn.Sequential(
nn.Conv2d(self.inplanes, self.planes, kernel_size=1),
nn.LayerNorm([self.planes, 1, 1]),
nn.ReLU(inplace=True), # yapf: disable
nn.Conv2d(self.planes, self.inplanes, kernel_size=1))
else:
self.channel_mul_conv = None
def spatial_pool(self, x):
batch, channel, height, width = x.size()
if self.pooling_type == 'att':
input_x = x
# [N, C, H * W]
input_x = input_x.view(batch, channel, height * width)
# [N, 1, C, H * W]
input_x = input_x.unsqueeze(1)
# [N, 1, H, W]
context_mask = self.conv_mask(x)
# [N, 1, H * W]
context_mask = context_mask.view(batch, 1, height * width)
# [N, 1, H * W]
context_mask = self.softmax(context_mask)
# [N, 1, H * W, 1]
context_mask = context_mask.unsqueeze(-1)
# [N, 1, C, 1]
context = torch.matmul(input_x, context_mask)
# [N, C, 1, 1]
context = context.view(batch, channel, 1, 1)
else:
# [N, C, 1, 1]
context = self.avg_pool(x)
return context
def forward(self, x):
# [N, C, 1, 1]
context = self.spatial_pool(x)
out = x
if self.channel_mul_conv is not None:
# [N, C, 1, 1]
channel_mul_term = torch.sigmoid(self.channel_mul_conv(context))
out = out * channel_mul_term
if self.channel_add_conv is not None:
# [N, C, 1, 1]
channel_add_term = self.channel_add_conv(context)
out = out + channel_add_term
return out
if __name__ == "__main__":
in_tensor = torch.ones((12, 64, 128, 128))
cb = ContextBlock(inplanes=64, ratio=1./16.,pooling_type='att')
out_tensor = cb(in_tensor)
print(in_tensor.shape)
print(out_tensor.shape)
2.6 CCNet

说明:也是Non-Local发展而来的注意力模块,其特殊之处在纵横交叉关注模块,可以以更有效的方式从远程依赖中获取上下文信息。
论文:https://arxiv.org/abs/1811.11721
代码:https://github.com/speedinghzl/CCNet
class CrissCrossAttention(nn.Module):
""" Criss-Cross Attention Module"""
def __init__(self, in_dim):
super(CrissCrossAttention, self).__init__()
self.chanel_in = in_dim
self.query_conv = nn.Conv2d(in_channels=in_dim,
out_channels=in_dim // 8,
kernel_size=1)
self.key_conv = nn.Conv2d(in_channels=in_dim,
out_channels=in_dim // 8,
kernel_size=1)
self.value_conv = nn.Conv2d(in_channels=in_dim,
out_channels=in_dim,
kernel_size=1)
self.gamma = nn.Parameter(torch.zeros(1))
def forward(self, x):
proj_query = self.query_conv(x)
proj_key = self.key_conv(x)
proj_value = self.value_conv(x)
energy = ca_weight(proj_query, proj_key)
attention = F.softmax(energy, 1)
out = ca_map(attention, proj_value)
out = self.gamma * out + x
return out
2.7 CBAM
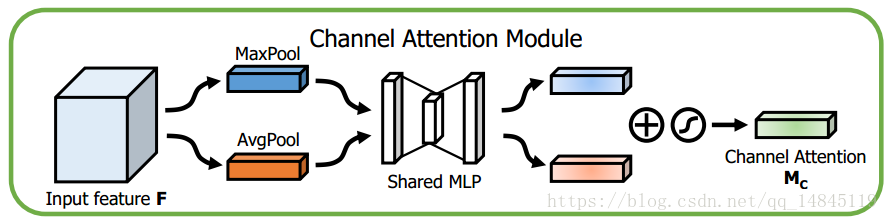
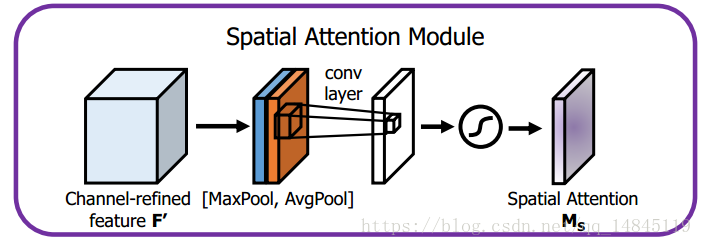

说明:将空间注意力机制和通道注意力机制进行串联
论文:https://arxiv.org/abs/1807.06521
代码:
import torch
import torch.nn as nn
def conv3x3(in_planes, out_planes, stride=1):
"3x3 convolution with padding"
return nn.Conv2d(in_planes,
out_planes,
kernel_size=3,
stride=stride,
padding=1,
bias=False)
class ChannelAttention(nn.Module):
def __init__(self, in_planes, ratio=4):
super(ChannelAttention, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.max_pool = nn.AdaptiveMaxPool2d(1)
self.sharedMLP = nn.Sequential(
nn.Conv2d(in_planes, in_planes // ratio, 1, bias=False), nn.ReLU(),
nn.Conv2d(in_planes // ratio, in_planes, 1, bias=False))
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avgout = self.sharedMLP(self.avg_pool(x))
maxout = self.sharedMLP(self.max_pool(x))
return self.sigmoid(avgout + maxout)
class SpatialAttention(nn.Module):
def __init__(self, kernel_size=7):
super(SpatialAttention, self).__init__()
assert kernel_size in (3, 7), "kernel size must be 3 or 7"
padding = 3 if kernel_size == 7 else 1
self.conv = nn.Conv2d(2, 1, kernel_size, padding=padding, bias=False)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avgout = torch.mean(x, dim=1, keepdim=True)
maxout, _ = torch.max(x, dim=1, keepdim=True)
x = torch.cat([avgout, maxout], dim=1)
x = self.conv(x)
return self.sigmoid(x)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.ca = ChannelAttention(planes)
self.sa = SpatialAttention()
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.ca(out) * out # 广播机制
out = self.sa(out) * out # 广播机制
if self.downsample is not None:
print("downsampling")
residual = self.downsample(x)
print(out.shape, residual.shape)
out += residual
out = self.relu(out)
return out
if __name__ == "__main__":
downsample = nn.Sequential(
nn.Conv2d(16, 32, kernel_size=1, stride=1, bias=False),
nn.BatchNorm2d(32))
x = torch.ones(3, 16, 32, 32)
model = BasicBlock(16, 32, stride=1, downsample=downsample)
print(model(x).shape)
2.8 BAM

说明:和CBAM同一个作者,将通道注意力和空间注意力用并联的方式连接
论文:https://arxiv.org/abs/1807.06514
代码:
import torch
import math
import torch.nn as nn
import torch.nn.functional as F
class Flatten(nn.Module):
def forward(self, x):
return x.view(x.size(0), -1)
class ChannelGate(nn.Module):
def __init__(self, gate_channel, reduction_ratio=16, num_layers=1):
super(ChannelGate, self).__init__()
self.gate_c = nn.Sequential()
self.gate_c.add_module('flatten', Flatten())
gate_channels = [gate_channel] # eg 64
gate_channels += [gate_channel // reduction_ratio] * num_layers # eg 4
gate_channels += [gate_channel] # 64
# gate_channels: [64, 4, 4]
for i in range(len(gate_channels) - 2):
self.gate_c.add_module(
'gate_c_fc_%d' % i,
nn.Linear(gate_channels[i], gate_channels[i + 1]))
self.gate_c.add_module('gate_c_bn_%d' % (i + 1),
nn.BatchNorm1d(gate_channels[i + 1]))
self.gate_c.add_module('gate_c_relu_%d' % (i + 1), nn.ReLU())
self.gate_c.add_module('gate_c_fc_final',
nn.Linear(gate_channels[-2], gate_channels[-1]))
def forward(self, x):
avg_pool = F.avg_pool2d(x, x.size(2), stride=x.size(2))
return self.gate_c(avg_pool).unsqueeze(2).unsqueeze(3).expand_as(x)
class SpatialGate(nn.Module):
def __init__(self,
gate_channel,
reduction_ratio=16,
dilation_conv_num=2,
dilation_val=4):
super(SpatialGate, self).__init__()
self.gate_s = nn.Sequential()
self.gate_s.add_module(
'gate_s_conv_reduce0',
nn.Conv2d(gate_channel,
gate_channel // reduction_ratio,
kernel_size=1))
self.gate_s.add_module('gate_s_bn_reduce0',
nn.BatchNorm2d(gate_channel // reduction_ratio))
self.gate_s.add_module('gate_s_relu_reduce0', nn.ReLU())
# 进行多个空洞卷积,丰富感受野
for i in range(dilation_conv_num):
self.gate_s.add_module(
'gate_s_conv_di_%d' % i,
nn.Conv2d(gate_channel // reduction_ratio,
gate_channel // reduction_ratio,
kernel_size=3,
padding=dilation_val,
dilation=dilation_val))
self.gate_s.add_module(
'gate_s_bn_di_%d' % i,
nn.BatchNorm2d(gate_channel // reduction_ratio))
self.gate_s.add_module('gate_s_relu_di_%d' % i, nn.ReLU())
self.gate_s.add_module(
'gate_s_conv_final',
nn.Conv2d(gate_channel // reduction_ratio, 1, kernel_size=1))
def forward(self, x):
return self.gate_s(x).expand_as(x)
class BAM(nn.Module):
def __init__(self, gate_channel):
super(BAM, self).__init__()
self.channel_att = ChannelGate(gate_channel)
self.spatial_att = SpatialGate(gate_channel)
def forward(self, x):
att = 1 + F.sigmoid(self.channel_att(x) * self.spatial_att(x))
return att * x
2.9 SplitAttention

说明:ResNeSt = SENet + SKNet + ResNeXt
论文:https://hangzhang.org/files/resnest.pdf
代码:
import torch
from torch import nn
import torch.nn.functional as F
from torch.nn import Conv2d, Module, Linear, BatchNorm2d, ReLU
from torch.nn.modules.utils import _pair
__all__ = ['SplAtConv2d']
class SplAtConv2d(Module):
"""Split-Attention Conv2d
"""
def __init__(self, in_channels, channels, kernel_size, stride=(1, 1), padding=(0, 0),
dilation=(1, 1), groups=1, bias=True,
radix=2, reduction_factor=4,
rectify=False, rectify_avg=False, norm_layer=None,
dropblock_prob=0.0, **kwargs):
super(SplAtConv2d, self).__init__()
padding = _pair(padding)
self.rectify = rectify and (padding[0] > 0 or padding[1] > 0)
self.rectify_avg = rectify_avg
inter_channels = max(in_channels*radix//reduction_factor, 32)
self.radix = radix
self.cardinality = groups
self.channels = channels
self.dropblock_prob = dropblock_prob
if self.rectify:
from rfconv import RFConv2d
self.conv = RFConv2d(in_channels, channels*radix, kernel_size, stride, padding, dilation,
groups=groups*radix, bias=bias, average_mode=rectify_avg, **kwargs)
else:
self.conv = Conv2d(in_channels, channels*radix, kernel_size, stride, padding, dilation,
groups=groups*radix, bias=bias, **kwargs)
self.use_bn = norm_layer is not None
if self.use_bn:
self.bn0 = norm_layer(channels*radix)
self.relu = ReLU(inplace=True)
self.fc1 = Conv2d(channels, inter_channels, 1, groups=self.cardinality)
if self.use_bn:
self.bn1 = norm_layer(inter_channels)
self.fc2 = Conv2d(inter_channels, channels*radix, 1, groups=self.cardinality)
if dropblock_prob > 0.0:
self.dropblock = DropBlock2D(dropblock_prob, 3)
self.rsoftmax = rSoftMax(radix, groups)
def forward(self, x):
x = self.conv(x)
if self.use_bn:
x = self.bn0(x)
if self.dropblock_prob > 0.0:
x = self.dropblock(x)
x = self.relu(x)
batch, rchannel = x.shape[:2]
if self.radix > 1:
splited = torch.split(x, rchannel//self.radix, dim=1)
gap = sum(splited)
else:
gap = x
gap = F.adaptive_avg_pool2d(gap, 1)
gap = self.fc1(gap)
if self.use_bn:
gap = self.bn1(gap)
gap = self.relu(gap)
atten = self.fc2(gap)
atten = self.rsoftmax(atten).view(batch, -1, 1, 1)
if self.radix > 1:
attens = torch.split(atten, rchannel//self.radix, dim=1)
out = sum([att*split for (att, split) in zip(attens, splited)])
else:
out = atten * x
return out.contiguous()
class rSoftMax(nn.Module):
def __init__(self, radix, cardinality):
super().__init__()
self.radix = radix
self.cardinality = cardinality
def forward(self, x):
batch = x.size(0)
if self.radix > 1:
x = x.view(batch, self.cardinality, self.radix, -1).transpose(1, 2)
x = F.softmax(x, dim=1)
x = x.reshape(batch, -1)
else:
x = torch.sigmoid(x)
return x
3. 其他模块
3.1 ACNet

说明:通过在训练过程中引入1x3 conv和3x1 conv,强化特征提取,实现效果提升
论文:ACNet: Strengthening the Kernel Skeletons for Powerful CNN via Asymmetric Convolution Blocks.
代码:
import torch.nn as nn
import torch
class CropLayer(nn.Module):
# E.g., (-1, 0) means this layer should crop the first and last rows of the feature map. And (0, -1) crops the first and last columns
def __init__(self, crop_set):
super(CropLayer, self).__init__()
self.rows_to_crop = - crop_set[0]
self.cols_to_crop = - crop_set[1]
assert self.rows_to_crop >= 0
assert self.cols_to_crop >= 0
def forward(self, input):
return input[:, :, self.rows_to_crop:-self.rows_to_crop, self.cols_to_crop:-self.cols_to_crop]
class ACBlock(nn.Module):
def __init__(self,
in_channels,
out_channels,
kernel_size,
stride=1,
padding=0,
dilation=1,
groups=1,
padding_mode='zeros',
deploy=False):
super(ACBlock, self).__init__()
self.deploy = deploy
if deploy:
self.fused_conv = nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
kernel_size=(kernel_size, kernel_size),
stride=stride,
padding=padding,
dilation=dilation,
groups=groups,
bias=True,
padding_mode=padding_mode)
else:
self.square_conv = nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
kernel_size=(kernel_size,
kernel_size),
stride=stride,
padding=padding,
dilation=dilation,
groups=groups,
bias=False,
padding_mode=padding_mode)
self.square_bn = nn.BatchNorm2d(num_features=out_channels)
center_offset_from_origin_border = padding - kernel_size // 2
ver_pad_or_crop = (center_offset_from_origin_border + 1,
center_offset_from_origin_border)
hor_pad_or_crop = (center_offset_from_origin_border,
center_offset_from_origin_border + 1)
if center_offset_from_origin_border >= 0:
self.ver_conv_crop_layer = nn.Identity()
ver_conv_padding = ver_pad_or_crop
self.hor_conv_crop_layer = nn.Identity()
hor_conv_padding = hor_pad_or_crop
else:
self.ver_conv_crop_layer = CropLayer(crop_set=ver_pad_or_crop)
ver_conv_padding = (0, 0)
self.hor_conv_crop_layer = CropLayer(crop_set=hor_pad_or_crop)
hor_conv_padding = (0, 0)
self.ver_conv = nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
kernel_size=(3, 1),
stride=stride,
padding=ver_conv_padding,
dilation=dilation,
groups=groups,
bias=False,
padding_mode=padding_mode)
self.hor_conv = nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
kernel_size=(1, 3),
stride=stride,
padding=hor_conv_padding,
dilation=dilation,
groups=groups,
bias=False,
padding_mode=padding_mode)
self.ver_bn = nn.BatchNorm2d(num_features=out_channels)
self.hor_bn = nn.BatchNorm2d(num_features=out_channels)
def forward(self, input):
if self.deploy:
return self.fused_conv(input)
else:
square_outputs = self.square_conv(input)
square_outputs = self.square_bn(square_outputs)
# print(square_outputs.size())
# return square_outputs
vertical_outputs = self.ver_conv_crop_layer(input)
vertical_outputs = self.ver_conv(vertical_outputs)
vertical_outputs = self.ver_bn(vertical_outputs)
# print(vertical_outputs.size())
horizontal_outputs = self.hor_conv_crop_layer(input)
horizontal_outputs = self.hor_conv(horizontal_outputs)
horizontal_outputs = self.hor_bn(horizontal_outputs)
# print(horizontal_outputs.size())
return square_outputs + vertical_outputs + horizontal_outputs
3.2 ASPP

说明:ASPP是DeepLabv3+其中一个核心创新点,用空间金字塔池化模块来进一步提取多尺度信息,这里是采用不同rate的空洞卷积来实现这一点。
论文:https://arxiv.org/pdf/1802.02611
代码:
import torch.nn as nn
import torch
class SeparableConv2d(nn.Module):
def __init__(self,
in_channels,
out_channels,
kernel_size=1,
stride=1,
padding=0,
dilation=1,
bias=False):
super(SeparableConv2d, self).__init__()
self.conv1 = nn.Conv2d(in_channels,
in_channels,
kernel_size,
stride,
padding,
dilation,
groups=in_channels,
bias=bias)
self.pointwise = nn.Conv2d(in_channels,
out_channels,
1,
1,
0,
1,
1,
bias=bias)
def forward(self, x):
x = self.conv1(x)
x = self.pointwise(x)
return x
class ASPP(nn.Module):
def __init__(self, inplanes, planes, rate):
super(ASPP, self).__init__()
self.rate = rate
if rate == 1:
kernel_size = 1
padding = 0
else:
kernel_size = 3
padding = rate
#self.conv1 = nn.Conv2d(planes, planes, kernel_size=3, bias=False,padding=1)
self.conv1 = SeparableConv2d(planes, planes, 3, 1, 1)
self.bn1 = nn.BatchNorm2d(planes)
self.relu1 = nn.ReLU()
# self.atrous_convolution = nn.Conv2d(inplanes, planes, kernel_size=kernel_size,
# stride=1, padding=padding, dilation=rate, bias=False)
self.atrous_convolution = SeparableConv2d(inplanes, planes,
kernel_size, 1, padding,
rate)
self.bn = nn.BatchNorm2d(planes)
self.relu = nn.ReLU()
self._init_weight()
def forward(self, x):
x = self.atrous_convolution(x)
x = self.bn(x)
#x = self.relu(x)
if self.rate != 1:
x = self.conv1(x)
x = self.bn1(x)
x = self.relu1(x)
return x
def _init_weight(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
torch.nn.init.kaiming_normal_(m.weight)
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
3.3 SPP

说明:这里SPP首先还是在yolov3-spp中提出的,借鉴了SPP-Net的处理方式,但是实际上有很大差别。
论文:https://github.com/AlexeyAB/darknet
http://pjreddie.com/darknet/
代码(实际就是几个最大池化层进行的组合):
### SPP ###
[maxpool]
stride=1
size=5
[route]
layers=-2
[maxpool]
stride=1
size=9
[route]
layers=-4
[maxpool]
stride=1
size=13
[route]
layers=-1,-3,-5,-6
### End SPP ###
3.4 BlazeBlock

说明:来自BlazeFace的一个模块,主要作用是轻量化
论文:https://www.arxiv.org/pdf/1907.05047
代码:
class BlazeBlock(nn.Module):
def __init__(self, inp, oup1, oup2=None, stride=1, kernel_size=5):
super(BlazeBlock, self).__init__()
self.stride = stride
assert stride in [1, 2]
self.use_double_block = oup2 is not None
self.use_pooling = self.stride != 1
if self.use_double_block:
self.channel_pad = oup2 - inp
else:
self.channel_pad = oup1 - inp
padding = (kernel_size - 1) // 2
self.conv1 = nn.Sequential(
# dw
nn.Conv2d(inp, inp, kernel_size=kernel_size, stride=stride,
padding=padding, groups=inp, bias=True),
nn.BatchNorm2d(inp),
# pw-linear
nn.Conv2d(inp, oup1, 1, 1, 0, bias=True),
nn.BatchNorm2d(oup1),
)
self.act = nn.ReLU(inplace=True)
if self.use_double_block:
self.conv2 = nn.Sequential(
nn.ReLU(inplace=True),
# dw
nn.Conv2d(oup1, oup1, kernel_size=kernel_size,
stride=1, padding=padding, groups=oup1, bias=True),
nn.BatchNorm2d(oup1),
# pw-linear
nn.Conv2d(oup1, oup2, 1, 1, 0, bias=True),
nn.BatchNorm2d(oup2),
)
if self.use_pooling:
self.mp = nn.MaxPool2d(kernel_size=self.stride, stride=self.stride)
def forward(self, x):
h = self.conv1(x)
if self.use_double_block:
h = self.conv2(h)
# skip connection
if self.use_pooling:
x = self.mp(x)
if self.channel_pad > 0:
x = F.pad(x, (0, 0, 0, 0, 0, self.channel_pad), 'constant', 0)
return self.act(h + x)
def initialize(module):
# original implementation is unknown
if isinstance(module, nn.Conv2d):
nn.init.kaiming_normal_(module.weight.data)
nn.init.constant_(module.bias.data, 0)
elif isinstance(module, nn.BatchNorm2d):
nn.init.constant_(module.weight.data, 1)
nn.init.constant_(module.bias.data, 0)
3. 5 深度可分离卷积
这个都比较熟悉,直接上代码:
import torch.nn as nn
class DWConv(nn.Module):
def __init__(self, in_plane, out_plane):
super(DWConv, self).__init__()
self.depth_conv = nn.Conv2d(in_channels=in_plane,
out_channels=in_plane,
kernel_size=3,
stride=1,
padding=1,
groups=in_plane)
self.point_conv = nn.Conv2d(in_channels=in_plane,
out_channels=out_plane,
kernel_size=1,
stride=1,
padding=0,
groups=1)
def forward(self, x):
x = self.depth_conv(x)
x = self.point_conv(x)
return x
3.6 FuseConvBn
折叠BN在公众号历史文章中可以看详解,用于在推理过程中加速推理过程。
import torch
def fuse_conv_and_bn(conv, bn):
# https://tehnokv.com/posts/fusing-batchnorm-and-conv/
with torch.no_grad():
# init
fusedconv = torch.nn.Conv2d(conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
bias=True)
# prepare filters
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps + bn.running_var)))
fusedconv.weight.copy_(torch.mm(w_bn, w_conv).view(fusedconv.weight.size()))
# prepare spatial bias
if conv.bias is not None:
b_conv = conv.bias
else:
b_conv = torch.zeros(conv.weight.size(0))
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
fusedconv.bias.copy_(torch.mm(w_bn, b_conv.reshape(-1, 1)).reshape(-1) + b_bn)
return fusedconv
3.7 MixConv2d

说明:这个模块是在MixNet中提出的,使用AutoML搜索的情况下,对卷积核进行了搜索和调整。
论文:https://arxiv.org/pdf/1907.09595.pdf
代码(以下代码出自u版yolov3):
import numpy as np
import torch
import torch.nn as nn
class MixConv2d(nn.Module): # MixConv: Mixed Depthwise Convolutional Kernels https://arxiv.org/abs/1907.09595
def __init__(self, in_ch, out_ch, k=(3, 5, 7), stride=1, dilation=1, bias=True, method='equal_params'):
super(MixConv2d, self).__init__()
groups = len(k)
if method == 'equal_ch': # equal channels per group
i = torch.linspace(0, groups - 1E-6, out_ch).floor() # out_ch indices
ch = [(i == g).sum() for g in range(groups)]
else: # 'equal_params': equal parameter count per group
b = [out_ch] + [0] * groups
a = np.eye(groups + 1, groups, k=-1)
a -= np.roll(a, 1, axis=1)
a *= np.array(k) ** 2
a[0] = 1
ch = np.linalg.lstsq(a, b, rcond=None)[0].round().astype(int) # solve for equal weight indices, ax = b
self.m = nn.ModuleList([nn.Conv2d(in_channels=in_ch,
out_channels=ch[g],
kernel_size=k[g],
stride=stride,
padding=k[g] // 2, # 'same' pad
dilation=dilation,
bias=bias) for g in range(groups)])
def forward(self, x):
return torch.cat([m(x) for m in self.m], 1)
3.8 PPM

说明:跟ASPP类似,只不过PSPNet的PPM是使用了池化进行的融合特征金字塔,聚合不同区域的上下文信息。
论文:https://arxiv.org/abs/1612.01105
代码:
import torch.nn as nn
import torch
import torch.nn.functional as F
class PSPModule(nn.Module):
def __init__(self, features, out_features=1024, sizes=(1, 2, 3, 6)):
super().__init__()
self.stages = []
self.stages = nn.ModuleList(
[self._make_stage(features, size) for size in sizes])
self.bottleneck = nn.Conv2d(features * (len(sizes) + 1),
out_features,
kernel_size=1)
self.relu = nn.ReLU()
def _make_stage(self, features, size):
prior = nn.AdaptiveAvgPool2d(output_size=(size, size))
conv = nn.Conv2d(features, features, kernel_size=1, bias=False)
return nn.Sequential(prior, conv)
def forward(self, feats):
h, w = feats.size(2), feats.size(3)
priors = [
F.upsample(input=stage(feats), size=(h, w), mode='bilinear')
for stage in self.stages
] + [feats]
bottle = self.bottleneck(torch.cat(priors, 1))
return self.relu(bottle)
3.9 RFB

说明:RFBNet提出了两种RFB模型,RFB和RFB-s,分别用于深层和浅层。和ASPP,PPM类似。来看一个对比图:

论文:https://arxiv.org/abs/1711.07767
代码:
import torch.nn as nn
import torch
class BasicConv(nn.Module):
def __init__(self,
in_planes,
out_planes,
kernel_size,
stride=1,
padding=0,
dilation=1,
groups=1,
relu=True,
bn=True,
bias=False):
super(BasicConv, self).__init__()
self.out_channels = out_planes
self.conv = nn.Conv2d(in_planes,
out_planes,
kernel_size=kernel_size,
stride=stride,
padding=padding,
dilation=dilation,
groups=groups,
bias=bias)
self.bn = nn.BatchNorm2d(
out_planes, eps=1e-5, momentum=0.01, affine=True) if bn else None
self.relu = nn.ReLU(inplace=True) if relu else None
def forward(self, x):
x = self.conv(x)
if self.bn is not None:
x = self.bn(x)
if self.relu is not None:
x = self.relu(x)
return x
class BasicRFB(nn.Module):
'''
[rfb]
filters = 128
stride = 1 or 2
scale = 1.0
'''
def __init__(self, in_planes, out_planes, stride=1, scale=0.1, visual=1):
super(BasicRFB, self).__init__()
self.scale = scale
self.out_channels = out_planes
inter_planes = in_planes // 8
self.branch0 = nn.Sequential(
BasicConv(in_planes,
2 * inter_planes,
kernel_size=1,
stride=stride),
BasicConv(2 * inter_planes,
2 * inter_planes,
kernel_size=3,
stride=1,
padding=visual,
dilation=visual,
relu=False))
self.branch1 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1),
BasicConv(inter_planes,
2 * inter_planes,
kernel_size=(3, 3),
stride=stride,
padding=(1, 1)),
BasicConv(2 * inter_planes,
2 * inter_planes,
kernel_size=3,
stride=1,
padding=visual + 1,
dilation=visual + 1,
relu=False))
self.branch2 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1),
BasicConv(inter_planes, (inter_planes // 2) * 3,
kernel_size=3,
stride=1,
padding=1),
BasicConv((inter_planes // 2) * 3,
2 * inter_planes,
kernel_size=3,
stride=stride,
padding=1),
BasicConv(2 * inter_planes,
2 * inter_planes,
kernel_size=3,
stride=1,
padding=2 * visual + 1,
dilation=2 * visual + 1,
relu=False))
self.ConvLinear = BasicConv(6 * inter_planes,
out_planes,
kernel_size=1,
stride=1,
relu=False)
self.shortcut = BasicConv(in_planes,
out_planes,
kernel_size=1,
stride=stride,
relu=False)
self.relu = nn.ReLU(inplace=False)
def forward(self, x):
x0 = self.branch0(x)
x1 = self.branch1(x)
x2 = self.branch2(x)
out = torch.cat((x0, x1, x2), 1)
out = self.ConvLinear(out)
short = self.shortcut(x)
out = out * self.scale + short
out = self.relu(out)
return out
class BasicRFB_small(nn.Module):
'''
[rfbs]
filters = 128
stride=1 or 2
scale = 1.0
'''
def __init__(self, in_planes, out_planes, stride=1, scale=0.1):
super(BasicRFB_small, self).__init__()
self.scale = scale
self.out_channels = out_planes
inter_planes = in_planes // 4
self.branch0 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1),
BasicConv(inter_planes,
inter_planes,
kernel_size=3,
stride=1,
padding=1,
relu=False))
self.branch1 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1),
BasicConv(inter_planes,
inter_planes,
kernel_size=(3, 1),
stride=1,
padding=(1, 0)),
BasicConv(inter_planes,
inter_planes,
kernel_size=3,
stride=1,
padding=3,
dilation=3,
relu=False))
self.branch2 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1),
BasicConv(inter_planes,
inter_planes,
kernel_size=(1, 3),
stride=stride,
padding=(0, 1)),
BasicConv(inter_planes,
inter_planes,
kernel_size=3,
stride=1,
padding=3,
dilation=3,
relu=False))
self.branch3 = nn.Sequential(
BasicConv(in_planes, inter_planes // 2, kernel_size=1, stride=1),
BasicConv(inter_planes // 2, (inter_planes // 4) * 3,
kernel_size=(1, 3),
stride=1,
padding=(0, 1)),
BasicConv((inter_planes // 4) * 3,
inter_planes,
kernel_size=(3, 1),
stride=stride,
padding=(1, 0)),
BasicConv(inter_planes,
inter_planes,
kernel_size=3,
stride=1,
padding=5,
dilation=5,
relu=False))
self.ConvLinear = BasicConv(4 * inter_planes,
out_planes,
kernel_size=1,
stride=1,
relu=False)
self.shortcut = BasicConv(in_planes,
out_planes,
kernel_size=1,
stride=stride,
relu=False)
self.relu = nn.ReLU(inplace=False)
def forward(self, x):
x0 = self.branch0(x)
x1 = self.branch1(x)
x2 = self.branch2(x)
x3 = self.branch3(x)
out = torch.cat((x0, x1, x2, x3), 1)
out = self.ConvLinear(out)
short = self.shortcut(x)
out = out * self.scale + short
out = self.relu(out)
return out
3.10 SEB

说明:严格来说,这不属于即插即用模块,但是我比较喜欢这种简单而实用的构造,所以也加进来了。SEB是ExFuse论文中提出的一种特征融合方法,并没有采用传统的相加或者concatenation的方法,使用了相乘的方法。
论文:https://arxiv.org/pdf/1804.03821
代码:
class SematicEmbbedBlock(nn.Module):
def __init__(self, high_in_plane, low_in_plane, out_plane):
super(SematicEmbbedBlock, self).__init__()
self.conv3x3 = nn.Conv2d(high_in_plane, out_plane, 3, 1, 1)
self.upsample = nn.UpsamplingBilinear2d(scale_factor=2)
self.conv1x1 = nn.Conv2d(low_in_plane, out_plane, 1)
def forward(self, high_x, low_x):
high_x = self.upsample(self.conv3x3(high_x))
low_x = self.conv1x1(low_x)
return high_x * low_x
3.11 SSHContextModule

说明:其实这样一看这个模块就是利用了两个分支不同的感受野,然后进行了融合,使用在人脸识别中,一个小的模块。
论文:https://www.arxiv.org/pdf/1708.03979
论文:
import torch
import torch.nn as nn
class Conv3x3BNReLU(nn.Module):
def __init__(self, in_channel, out_channel):
super(Conv3x3BNReLU,self).__init__()
self.conv3x3 = nn.Conv2d(in_channel, out_channel, 3, 1, 1)
self.bn = nn.BatchNorm2d(out_channel)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
return self.relu(self.bn(self.conv3x3(x)))
class SSHContextModule(nn.Module):
def __init__(self, in_channel):
super(SSHContextModule, self).__init__()
self.stem = Conv3x3BNReLU(in_channel, in_channel//2)
self.branch1_conv3x3 = Conv3x3BNReLU(in_channel//2, in_channel//2)
self.branch2_conv3x3_1 = Conv3x3BNReLU(in_channel//2, in_channel//2)
self.branch2_conv3x3_2 = Conv3x3BNReLU(in_channel//2, in_channel//2)
def forward(self, x):
x = self.stem(x)
# branch1
x1 = self.branch1_conv3x3(x)
# branch2
x2 = self.branch2_conv3x3_1(x)
x2 = self.branch2_conv3x3_2(x2)
# concat
# print(x1.shape, x2.shape)
return torch.cat([x1, x2], dim=1)
if __name__ == "__main__":
in_tensor = torch.zeros((6, 64, 128, 128))
module = SSHContextModule(64)
out_tensor = module(in_tensor)
print(out_tensor.shape)
3.12 Strip Pooling

说明:跟CCNet挺像的,就是对SPP这种传统的Spatial Pooling进行了改进,设计了新的体系结构。
论文:https://arxiv.org/abs/2003.13328v1
代码:
import torch
import torch.nn as nn
import torch.nn.functional as F
'''
https://www.cnblogs.com/YongQiVisionIMAX/p/12630769.html
https://github.com/Andrew-Qibin/SPNet/blob/master/models/spnet.py
'''
class StripPooling(nn.Module):
def __init__(self, in_channels, pool_size, norm_layer, up_kwargs):
super(StripPooling, self).__init__()
self.pool1 = nn.AdaptiveAvgPool2d(pool_size[0])
self.pool2 = nn.AdaptiveAvgPool2d(pool_size[1])
self.pool3 = nn.AdaptiveAvgPool2d((1, None))
self.pool4 = nn.AdaptiveAvgPool2d((None, 1))
inter_channels = int(in_channels/4)
self.conv1_1 = nn.Sequential(nn.Conv2d(in_channels, inter_channels, 1, bias=False),
norm_layer(inter_channels),
nn.ReLU(True))
self.conv1_2 = nn.Sequential(nn.Conv2d(in_channels, inter_channels, 1, bias=False),
norm_layer(inter_channels),
nn.ReLU(True))
self.conv2_0 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
norm_layer(inter_channels))
self.conv2_1 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
norm_layer(inter_channels))
self.conv2_2 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
norm_layer(inter_channels))
self.conv2_3 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, (1, 3), 1, (0, 1), bias=False),
norm_layer(inter_channels))
self.conv2_4 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, (3, 1), 1, (1, 0), bias=False),
norm_layer(inter_channels))
self.conv2_5 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
norm_layer(inter_channels),
nn.ReLU(True))
self.conv2_6 = nn.Sequential(nn.Conv2d(inter_channels, inter_channels, 3, 1, 1, bias=False),
norm_layer(inter_channels),
nn.ReLU(True))
self.conv3 = nn.Sequential(nn.Conv2d(inter_channels*2, in_channels, 1, bias=False),
norm_layer(in_channels))
# bilinear interpolate options
self._up_kwargs = up_kwargs
def forward(self, x):
_, _, h, w = x.size()
x1 = self.conv1_1(x)
x2 = self.conv1_2(x)
x2_1 = self.conv2_0(x1)
x2_2 = F.interpolate(self.conv2_1(self.pool1(x1)),
(h, w), **self._up_kwargs)
x2_3 = F.interpolate(self.conv2_2(self.pool2(x1)),
(h, w), **self._up_kwargs)
x2_4 = F.interpolate(self.conv2_3(self.pool3(x2)),
(h, w), **self._up_kwargs)
x2_5 = F.interpolate(self.conv2_4(self.pool4(x2)),
(h, w), **self._up_kwargs)
x1 = self.conv2_5(F.relu_(x2_1 + x2_2 + x2_3))
x2 = self.conv2_6(F.relu_(x2_5 + x2_4))
out = self.conv3(torch.cat([x1, x2], dim=1))
return F.relu_(x + out)
class PyramidPooling(nn.Module):
"""
Reference:
Zhao, Hengshuang, et al. *"Pyramid scene parsing network."*
"""
def __init__(self, in_channels, norm_layer, up_kwargs):
super(PyramidPooling, self).__init__()
self.pool1 = nn.AdaptiveAvgPool2d(1)
self.pool2 = nn.AdaptiveAvgPool2d(2)
self.pool3 = nn.AdaptiveAvgPool2d(3)
self.pool4 = nn.AdaptiveAvgPool2d(6)
out_channels = int(in_channels/4)
self.conv1 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True))
self.conv2 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True))
self.conv3 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True))
self.conv4 = nn.Sequential(nn.Conv2d(in_channels, out_channels, 1, bias=False),
norm_layer(out_channels),
nn.ReLU(True))
# bilinear interpolate options
self._up_kwargs = up_kwargs
def forward(self, x):
_, _, h, w = x.size()
feat1 = F.interpolate(self.conv1(self.pool1(x)),
(h, w), **self._up_kwargs)
feat2 = F.interpolate(self.conv2(self.pool2(x)),
(h, w), **self._up_kwargs)
feat3 = F.interpolate(self.conv3(self.pool3(x)),
(h, w), **self._up_kwargs)
feat4 = F.interpolate(self.conv4(self.pool4(x)),
(h, w), **self._up_kwargs)
return torch.cat((x, feat1, feat2, feat3, feat4), 1)
class SPHead(nn.Module):
def __init__(self, in_channels, out_channels, norm_layer, up_kwargs):
super(SPHead, self).__init__()
inter_channels = in_channels // 2
self.trans_layer = nn.Sequential(nn.Conv2d(in_channels, inter_channels, 1, 1, 0, bias=False),
norm_layer(inter_channels),
nn.ReLU(True)
)
self.strip_pool1 = StripPooling(
inter_channels, (20, 12), norm_layer, up_kwargs)
self.strip_pool2 = StripPooling(
inter_channels, (20, 12), norm_layer, up_kwargs)
self.score_layer = nn.Sequential(nn.Conv2d(inter_channels, inter_channels // 2, 3, 1, 1, bias=False),
norm_layer(inter_channels // 2),
nn.ReLU(True),
nn.Dropout2d(0.1, False),
nn.Conv2d(inter_channels // 2, out_channels, 1))
def forward(self, x):
x = self.trans_layer(x)
x = self.strip_pool1(x)
x = self.strip_pool2(x)
x = self.score_layer(x)
return x
















 1108
1108

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









