







 本文详细介绍了步进电机的工作原理和技术指标,包括相数、步距角和拍数的概念,并提供了一个具体的二相四线步进电机实例。此外,还分享了基于STC89C51单片机的步进电机控制代码。
本文详细介绍了步进电机的工作原理和技术指标,包括相数、步距角和拍数的概念,并提供了一个具体的二相四线步进电机实例。此外,还分享了基于STC89C51单片机的步进电机控制代码。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。步进电机必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
技术指标:
(1)、相数-----------电机内部的线圈组数。电机相数不同,一般二相电机的步距角为0.9°/1.8°。
(2)、步距角--------表示控制系统每发一个步进脉冲信号,电机所转动的角度。二相四线步进电机步距角为0.9°/1.8°(表示 半步工作时为0.9°、整步工作时为1.8°),这个步距角称为“电机固有步距角”。
(3)、拍数-----------完成一个 磁场周期性变化所需要脉冲数或导电状态。
工作原理:
两相四线步进电机以8拍方式工作,则每个脉冲旋转0.9°,即每旋转一圈需要400个脉冲信号来励磁。步进电机的正、反转由励磁脉冲产生的顺序来控制,它的控制等效电路如图所示:
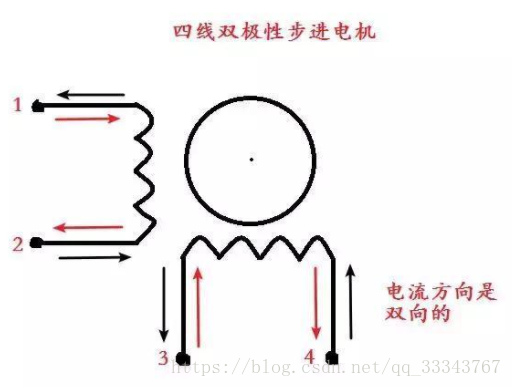
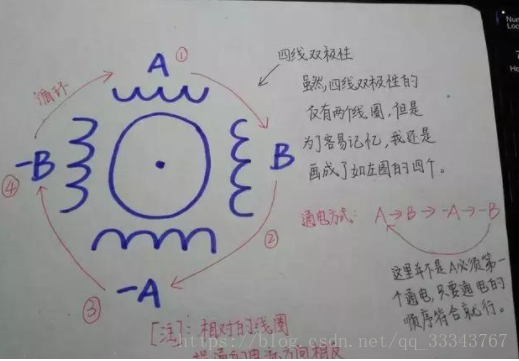
它有4条励磁信号引线1,2,3,4分别代表A,-A, B, -B。通过控制这4条引线上励磁脉冲产生的时刻,即可控制步进电机的转动。每出现一个脉冲信号,步进电机只走一步。因此,只要依序不断送出脉冲信号,步进电机就能实现连续转动。
一-二相励磁-----为一相励磁与二相励磁交替导通的方式。每送一个励磁信号,步进电机旋转0.9°。
励磁顺序表:
STEP A -A B -B
1 1 0 0 0
2 1 0 1 0
3 0 0 1 0
4 0 1 1 0
5 0 1 0 0
6 0 1 0 1
7 0 0 0 1
8 1 0 0 1
L298N引脚图:
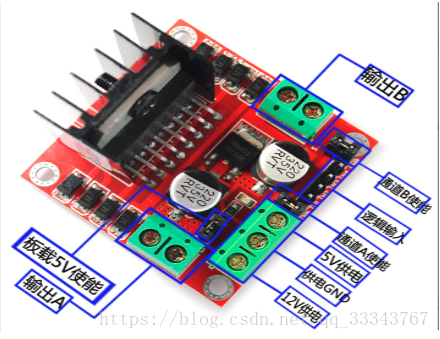
逻辑输入IN1~IN4分别与单片机的控制引脚相连,输出A和输出B(OUT1~OUT4)分别与电机的A、-A、B、-B相连。
12V供电和GND使用稳压电源(可以电源适配器6-12V,我使用的是8.2V)。
注意:同时GND还要与单片机的GND相连接,这样才能控制。
最后STC89C51的步进电机控制代码代码:
其中IN1~IN4分别与P1.0~P1.3口连接。使用定时器T0实现准确延时。
//*********************************************
//Developer:Saber
//Project:Motor Control
//Time:2018/4/18
//*********************************************
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
static unsigned int count;
static unsigned int endcount;
//八拍驱动方式正转表 A-B- --> B- --> B-A --> A --> AB --> B
// --> BA- --> A- --> A-B-
uchar upstep8_table[]={0x05,0x01,0x09,0x08,0x0A,0x02,0x06,0x04};
//四拍驱动方式正转表 A --> B --> A- --> B-
uchar upstep4_table[]={0x08,0x02,0x06,0x01};
void delay(uint ims); //变量延时函数
void Interrupt0_Init(); //中断0初始化
void MotorSpeedOrDirection(uint var, uchar state); //控制电机转速和方向
void ConStep(uchar var); //步进控制器
void MotorStop(void); //停止
void main()
{
unsigned int sum=0;
P1 = 0x00;
count = 0;
Interrupt0_Init();
while(1)
{
MotorSpeedOrDirection(1, 0);
}
}
//******************************
// 步进电机停止函数
//作用:停止
//******************************
void MotorStop(void)
{
P1 = 0x00;
}
//******************************
// 外部中断0初始化函数
//作用:初始化外部中断
//******************************
void Interrupt0_Init()
{
EA = 1;
TMOD = 0x11;
ET0 = 1;
// TH0=0xFF;
// TL0=0x28;
TH0=(65536-1000)/256;
TL0=(65536-1000)%256;
TR0=1;
}
//******************************
// 中断处理函数
//作用:定时器0的中断处理
//******************************
void timeint(void) interrupt 1
{
// TH0=0xFF;
// TL0=0x28; //216----234us
// 定时器定时1ms
TH0=(65536-1000)/256;
TL0=(65536-1000)%256;
count++;
}
//******************************
//
//延时i ms
//******************************
void delay(uint ims)
{
endcount=ims;
count=0;
do{}while(count<endcount);
}
//******************************
// 步进电机驱动函数
//作用:通过变量var控制电动机的转速高低,通过变量state判断电动机的正反转
// state:0 正转,state: 1 反转
//使用8拍能够实现比较平滑的转动,使用4拍时电机震动比较大。
//******************************
void MotorSpeedOrDirection(uint var, uchar state)
{
uchar i=0;
if(!state)
{
for(i=0; i<8; i++)
{
P1=upstep8_table[i];
delay(var);
}
}else{
for(i=7; i>0; --i)
{
P1=upstep8_table[i];
delay(var);
}
}
}
//******************************
// 步进控制函数
//作用:通过变量var控制旋转圈速
//******************************
void ConStep(uchar var)
{
uchar i=0,j=0,m=0,k=0;
while(k++<var)
{
for(i=0;i<20;i++)
{
for(m=0;m<20;m++)
{
P1=upstep8_table[j];
j++;
if(j>=8) //每8次一个循环
j=0;
delay(1);
}
}
}
}

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









