







正文
大家好,我是bug菌~
大家在网上应该经常有看到机器狗,机器人动起来需要反复的原地踏步,或者是转个弯都得多踏几次步,会给一种机械味很重的感觉。
那么今天bug菌将跟大家聊一些这种跺脚深层次一点的原因,解解惑~
1
人类胜利与机器困局
人体站立平衡
人类的平衡是神经系统、生物力学与多感官整合的精密协作: 看似静止的站立实为动态调控,人体如同倒置钟摆,依赖肌肉持续张力(非单纯跟腱弹性)维持基础支撑,同时通过多层级神经反馈(脊髓反射30-50ms延迟+脑部200ms高级整合)快速修正失衡,并以前馈机制预判风险(如预收紧肌肉)。前庭系统捕捉低频晃动(<0.1Hz),视觉追踪高频位移(>1Hz),足底触觉提供实时接触信息,三者滤波融合后消除环境干扰。修正动作实际频率仅1-3Hz,高频震颤(5-15Hz)多为肌肉被动振荡,而“每秒百次调节”实为跨时间尺度的协同控制(脊髓毫秒级微调+脑部秒级策略优化),所以人体平衡是多模态实时调控体系,属实复杂。
机器人平衡
人玩过平衡车的都知道,基本上都是闭环反馈控制,只是相对控制会更加复杂一点,bug菌画了张示意图,如下:
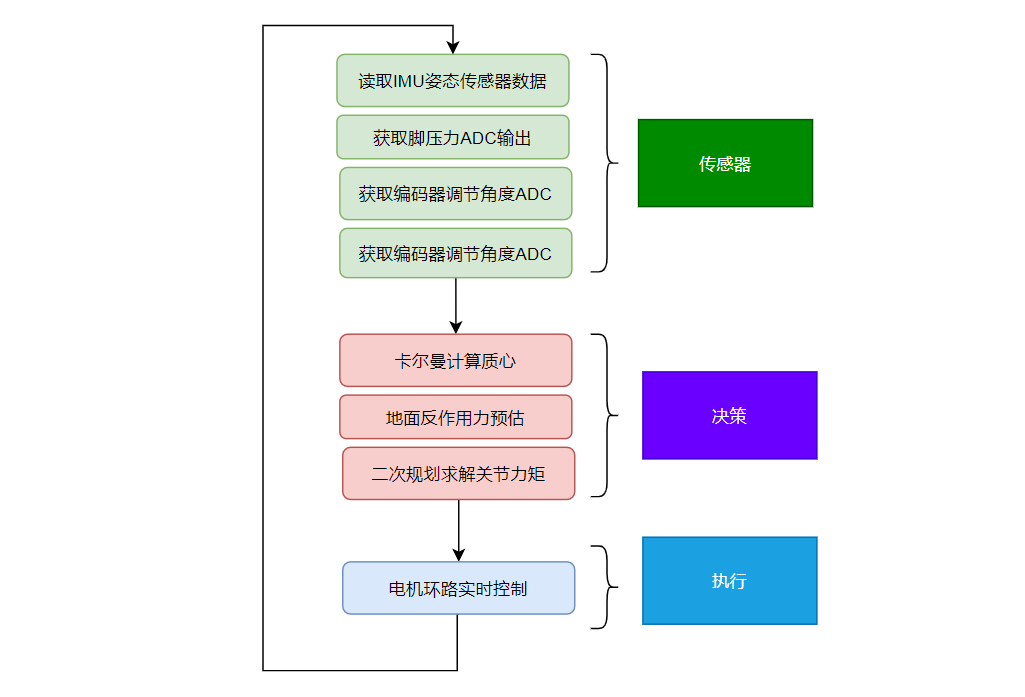
可以说这个数字闭环中的每个环节都在积累误差,最终都必须通过物理运动来消除不确定性。
2
工程现实问题
根据现有技术,要做机器人不得不面临着各种现实的问题。
首先对于反馈系统,传感器的性能品质是要直面的问题,精度、准度、噪声等稳定性,现在IMU采用的加速度噪声都不小,及时再小的误差经过积分运算,长时间也会导致较大的位置漂移,这说明了为何算法上需要周期性重定位。
既然简单聊了传感器,该谈一下执行结构了,执行机构的非线性是非常影响控制效果的,如下是人类的肌肉与电机特性,简单那比较:
特性 | 生物肌肉 | 电机+谐波减速器 |
|---|---|---|
力分辨率 | <1% | 5%-10% |
刚度调节范围 | 100倍 | 固定传动比 |
力衰减带宽 | ~5Hz | 50-100Hz |
能量效率(静态保持) | 0% | 30%-50% |
这导致电机必须持续运动来补偿静态误差,如同相机防抖的微动机制。
最后肯定是控制算法了,如果单纯用经典控制,像PID、频率法,相对就比较吃力,难以处理多变量耦合、非线性(如柔性关节摩擦)和强干扰环境。
由于需要处理动态平衡和复杂的地形适应,通常需要更高级的控制策略。例如,模型预测控制、阻抗控制、以及基于强化学习的自适应控制。这些方法属于现代控制理论,甚至超越传统现代控制,进入智能控制的范畴。
但在一个大系统中然而可以看到经典控制的身影,比如一些电机的控制等单输入单输出(SISO)的控制模块。
然而经典控制理论中的摩擦极限环现象:当系统存在静摩擦时,PID控制必然引发小幅振荡,为克服静摩擦,控制器必须主动注入能量,这正是跺脚动作的能量来源。虽然现代控制通过非线性建模、实时补偿和优化预测,理论上可根除经典摩擦极限环,但在工程实践中仍需权衡模型精度、计算负载和硬件限制。
3
剁脚的好处
大家有学习过在现代控制理论的话,就一定会接触到观测器,如果不运动,反而系统相关状态变量是不可观测的。
非线性掩盖效应
静摩擦力、齿轮间隙等非线性因素在静止时主导系统行为,掩盖真实动力学特性。例如,关节静摩擦力可能被观测器误判为外部负载,导致状态估计偏差。
传感器信息局限
常规传感器(如编码器)在静止时仅提供位置数据,无法直接测量速度、摩擦力等隐含状态。若无动态激励,观测器无法通过微分或滤波推算隐藏变量。
那也就无法较好的控制,所以机器人老剁脚就是因为就是一种主动的进行扰动注入,然后从噪声中提取信息,这样也就增加了系统对环境感知能力,噪声扰动成为系统辨识的探针,研究控制理论的确实是一帮天才。
当然还有一些其他好处,比如运动起来的冲击能量被循环用于运动控制,机械振动转化为可存储电能等等。
运动不仅是控制目标,更是感知手段——通过动态暴露隐藏状态,实现“以动致静”的精准估计。
最后
好了,今天就跟大家分享这么多了,如果你觉得有所收获,一定记得点个赞~
唯一、永久、免费分享嵌入式技术知识平台~
推荐专辑 点击蓝色字体即可跳转
☞ MCU进阶专辑

☞ “bug说”专辑

☞ 专辑|手撕C语言
☞ 专辑|经验分享





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











