








目录
Momentum、AdaGrad对SGD的改进体现在哪里?速度?方向?在图上有哪些体现?
仅从轨迹来看,Adam似乎不如AdaGrad效果好,是这样么
总结SGD、Momentum、AdaGrad、Adam的优缺点
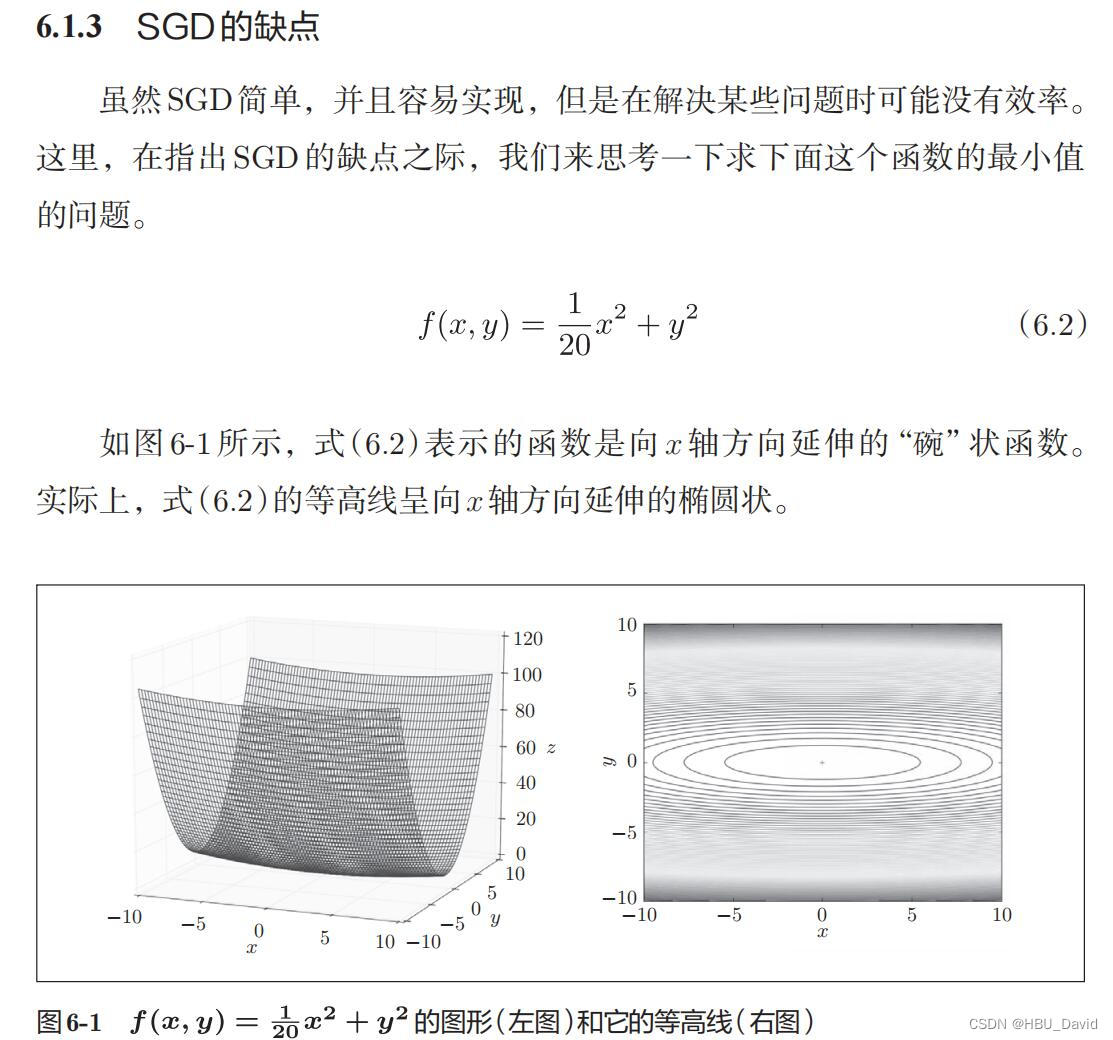
编程实现图6-1,并观察特征
import numpy as np
from matplotlib import pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
def func(x, y):
return x * x / 20 + y * y
def paint_loss_func():
x = np.linspace(-50, 50, 100) # x的绘制范围是-50到50,从改区间均匀取100个数
y = np.linspace(-50, 50, 100) # y的绘制范围是-50到50,从改区间均匀取100个数
X, Y = np.meshgrid(x, y)
Z = func(X, Y)
fig = plt.figure() # figsize=(10, 10))
ax = Axes3D(fig)
plt.xlabel('x')
plt.ylabel('y')
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='rainbow')
plt.show()
paint_loss_func()

最底下是弧线,所以有全局最小值
观察梯度方向

底部弧度很小,下降方向基本沿着y轴,很多地方没有指向(0,0)
编写代码实现算法,并可视化轨迹
# coding: utf-8
import numpy as np
import matplotlib.pyplot as plt
from collections import OrderedDict
class SGD:
"""随机梯度下降法(Stochastic Gradient Descent)"""
def __init__(self, lr=0.01):
self.lr = lr
def update(self, params, grads):
for key in params.keys():
params[key] -= self.lr * grads[key]
class Momentum:
"""Momentum SGD"""
def __init__(self, lr=0.01, momentum=0.9):
self.lr = lr
self.momentum = momentum
self.v = None
def update(self, params, grads):
if self.v is None:
self.v = {}
for key, val in params.items():
self.v[key] = np.zeros_like(val)
for key in params.keys():
self.v[key] = self.momentum * self.v[key] - self.lr * grads[key]
params[key] += self.v[key]
class Nesterov:
"""Nesterov's Accelerated Gradient (http://arxiv.org/abs/1212.0901)"""
def __init__(self, lr=0.01, momentum=0.9):
self.lr = lr
self.momentum = momentum
self.v = None
def update(self, params, grads):
if self.v is None:
self.v = {}
for key, val in params.items():
self.v[key] = np.zeros_like(val)
for key in params.keys():
self.v[key] *= self.momentum
self.v[key] -= self.lr * grads[key]
params[key] += self.momentum * self.momentum * self.v[key]
params[key] -= (1 + self.momentum) * self.lr * grads[key]
class AdaGrad:
"""AdaGrad"""
def __init__(self, lr=0.01):
self.lr = lr
self.h = None
def update(self, params, grads):
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
self.h[key] += grads[key] * grads[key]
params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7)
class RMSprop:
"""RMSprop"""
def __init__(self, lr=0.01, decay_rate=0.99):
self.lr = lr
self.decay_rate = decay_rate
self.h = None
def update(self, params, grads):
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
self.h[key] *= self.decay_rate
self.h[key] += (1 - self.decay_rate) * grads[key] * grads[key]
params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7)
class Adam:
"""Adam (http://arxiv.org/abs/1412.6980v8)"""
def __init__(self, lr=0.001, beta1=0.9, beta2=0.999):
self.lr = lr
self.beta1 = beta1
self.beta2 = beta2
self.iter = 0
self.m = None
self.v = None
def update(self, params, grads):
if self.m is None:
self.m, self.v = {}, {}
for key, val in params.items():
self.m[key] = np.zeros_like(val)
self.v[key] = np.zeros_like(val)
self.iter += 1
lr_t = self.lr * np.sqrt(1.0 - self.beta2 ** self.iter) / (1.0 - self.beta1 ** self.iter)
for key in params.keys():
self.m[key] += (1 - self.beta1) * (grads[key] - self.m[key])
self.v[key] += (1 - self.beta2) * (grads[key] ** 2 - self.v[key])
params[key] -= lr_t * self.m[key] / (np.sqrt(self.v[key]) + 1e-7)
def f(x, y):
return x ** 2 / 20.0 + y ** 2
def df(x, y):
return x / 10.0, 2.0 * y
init_pos = (-7.0, 2.0)
params = {}
params['x'], params['y'] = init_pos[0], init_pos[1]
grads = {}
grads['x'], grads['y'] = 0, 0
optimizers = OrderedDict()
optimizers["SGD"] = SGD(lr=0.95)
optimizers["Momentum"] = Momentum(lr=0.1)
optimizers["AdaGrad"] = AdaGrad(lr=1.5)
optimizers["Adam"] = Adam(lr=0.3)
idx = 1
for key in optimizers:
optimizer = optimizers[key]
x_history = []
y_history = []
params['x'], params['y'] = init_pos[0], init_pos[1]
for i in range(30):
x_history.append(params['x'])
y_history.append(params['y'])
grads['x'], grads['y'] = df(params['x'], params['y'])
optimizer.update(params, grads)
x = np.arange(-10, 10, 0.01)
y = np.arange(-5, 5, 0.01)
X, Y = np.meshgrid(x, y)
Z = f(X, Y)
# for simple contour line
mask = Z > 7
Z[mask] = 0
# plot
plt.subplot(2, 2, idx)
idx += 1
plt.plot(x_history, y_history, 'o-', color="red")
plt.contour(X, Y, Z) # 绘制等高线
plt.ylim(-10, 10)
plt.xlim(-10, 10)
plt.plot(0, 0, '+')
plt.title(key)
plt.xlabel("x")
plt.ylabel("y")
plt.subplots_adjust(wspace=0, hspace=0) # 调整子图间距
plt.show()
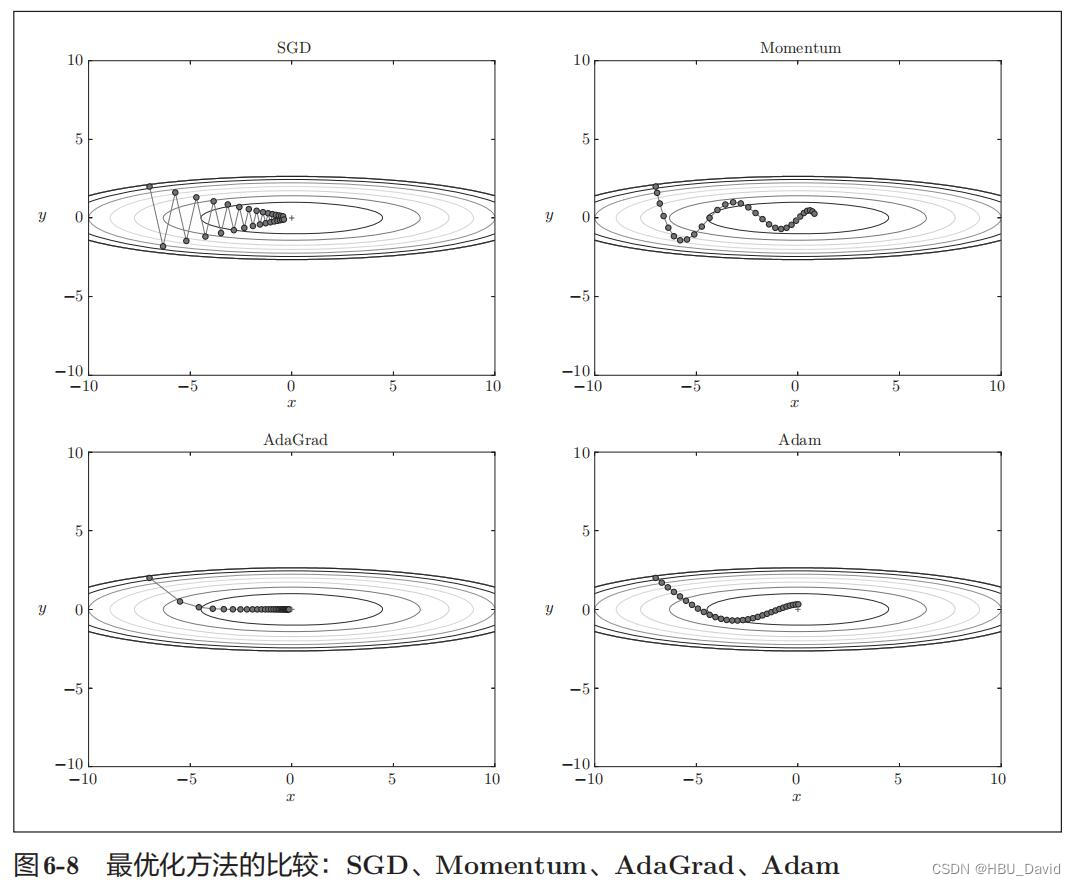
 分析上图,说明原理
分析上图,说明原理
为什么SGD会走“之字形”?其它算法为什么会比较平滑?
选择合适的learning rate比较困难 - 对所有的参数更新使用同样的learning rate。对于稀疏数据或者特征,有时我们可能想更新快一些对于不经常出现的特征,对于常出现的特征更新慢一些,这时候SGD就不太能满足要求了
SGD容易收敛到局部最优,并且在某些情况下可能被困在鞍点
Momentum、AdaGrad对SGD的改进体现在哪里?速度?方向?在图上有哪些体现?
SGD方法的一个缺点是,其更新方向完全依赖于当前的batch,因而其更新十分不稳定。解决这一问题的一个简单的做法便是引入momentum。
momentum即动量,它模拟的是物体运动时的惯性,即更新的时候在一定程度上保留之前更新的方向,同时利用当前batch的梯度微调最终的更新方向。这样一来,可以在一定程度上增加稳定性,从而学习地更快,并且还有一定摆脱局部最优的能力。
惯性的获得是基于历史信息的,那么,除了从过去的步伐中获得一股子向前冲的劲儿,还能获得什么呢?我们还期待获得对周围环境的感知,即使蒙上双眼,依靠前几次迈步的感觉,也应该能判断出一些信息,比如这个方向总是坑坑洼洼的 , 那个方向可能很平坦。
随机梯度下降法对环境的感知是指在参数空间中,根据不同参数的一些经验性判断 , 自适应地确定参数的学习速率,不同参数的更新步幅是不同的 。 例如,在文本处理中训练词嵌入模型的参数肘,有的词或词组频繁出现,有的词或词组则极少出现。 数据的稀疏性导致相应参数的梯度的稀疏性,不频繁出现的词或词组的参数的梯度在大多数情况下为零,从而这些参数被更新的频率很低。 在应用中, 我们希望更新频率低的参数可以拥有较大的更新步幅, 而更新频率高的参数的步幅可以减小 。Ada Grad 方法采用 “历史梯度平方和”来衡量不同参数的梯度的稀疏性,取值越小表明越稀疏。
仅从轨迹来看,Adam似乎不如AdaGrad效果好,是这样么
并不是,Adam 方法将惯性保持和环境感知这两个优点集于一身。 一方面,Adam 记录梯度的一阶矩( first moment ),即过往梯度与当前梯度的平均,这体现了惯性保持;另一方面, Adam 还记录梯度的二阶矩( second moment ),即过往梯度平方与当前梯度平方的平均 ,这类似 AdaGrad 方法, 体现了环境感知能力,为不同参数产生自适应的学习速率。 一阶矩和二阶矩采用类似于滑动窗口内求平均的思想进行融合,即当前梯度和近一段时间内梯度的平均值,时间久远的梯度对当前平均值的贡献呈指数衰减。
四种方法分别用了多长时间?是否符合预期?
0.04188799858093262
0.040869951248168945
0.04188966751098633
0.040892839431762695 符合预期因为参数设置原因,所以都是路径最优的,时间差不多
总结SGD、Momentum、AdaGrad、Adam的优缺点
SGD:
选择合适的learning rate比较困难 - 对所有的参数更新使用同样的learning rate。对于稀疏数据或者特征,有时我们可能想更新快一些对于不经常出现的特征,对于常出现的特征更新慢一些,这时候SGD就不太能满足要求了
SGD容易收敛到局部最优,并且在某些情况下可能被困在鞍点
Momentum:
-
下降初期时,使用上一次参数更新,下降方向一致,乘上较大的
 能够进行很好的加速
能够进行很好的加速 -
下降中后期时,在局部最小值来回震荡的时候,
 , 使得更新幅度增大,跳出陷阱
, 使得更新幅度增大,跳出陷阱 -
在梯度改变方向的时候,
 能够减少更新 总而言之,momentum项能够在相关方向加速SGD,抑制振荡,从而加快收敛
能够减少更新 总而言之,momentum项能够在相关方向加速SGD,抑制振荡,从而加快收敛
Adagrad:
优点:
-
前期
 较小的时候, regularizer较大,能够放大梯度
较小的时候, regularizer较大,能够放大梯度 -
后期
 较大的时候,regularizer较小,能够约束梯度
较大的时候,regularizer较小,能够约束梯度 -
适合处理稀疏梯度
缺点:
- 由公式可以看出,仍依赖于人工设置一个全局学习率
 设置过大的话,会使regularizer过于敏感,对梯度的调节太大
设置过大的话,会使regularizer过于敏感,对梯度的调节太大 - 中后期,分母上梯度平方的累加将会越来越大,使
 ,使得训练提前结束
,使得训练提前结束
Adam :
-
结合了Adagrad善于处理稀疏梯度和RMSprop善于处理非平稳目标的优点
-
对内存需求较小
-
为不同的参数计算不同的自适应学习率
-
也适用于大多非凸优化 - 适用于大数据集和高维空间
总结 :
这一部分上课听的还是比较认真,加上之前的基础所以做起来还是不那么难,不过还是有一些收获在里面的,这两天因为家里亲戚阳了,而我又接触过,所以也不小心阳了,有些难受,所以作业跟实验可能写的慢了一些,确实是有点写不下去,总想在床上躺着,等挺过这几天了一定要重新回来把没有做完的选做再做一做。
参考链接:(23条消息) 深度学习优化方法总结比较(SGD,Adagrad,Adadelta,Adam,Adamax,Nadam)_Tom Hardy的博客-CSDN博客















 371
371











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











