







1、ppu的概念
在运动控制领域中,尤其是自动化的运动控制卡中经常有一个概念ppu,ppu是运动控制卡的虚拟单位,是为了方便软件开发人员在程序中使用的一个单位,其目的是为了应对不同的机构(设置完成后,当我们设置指令为1,则机构走1mm),这里以研华pci1203运动控制卡为例,PPU 的值 = CFG_AxPPU 属性值(分子) /CFG_AxPPUDenominator(分母) 属性值(这个两个属性值可以在研华自带的utility软件的轴参数中设置),如下图所示:
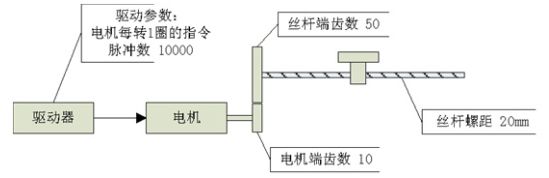
对于上述机械机构和驱动参数,PPU 的设定推导如下:
机构条件:
丝杆导程:20mm(对于单线螺纹,导程和螺距相同,对于多线螺纹,导程=螺距线数)
丝杆端齿数为 50,电机端齿数为 10,即丝杆转 1 圈,电机需要转 50/10=5 圈。
驱动器参数为电机每转 1 圈的指令脉冲数为 10000。
若用户预设定单位为 1 毫米 (mm) 时(丝杠所在机构走1mm),则依照上列机构条件,可以得到以下计算公式:
PPU = (1000050)/(10*20)
化简后可得到 :
PPU=500000/200=2500
即实际机构移动每毫米 (mm) 轴卡需输出的脉冲数为 2500,单位为pulse/mm。
因此可设置:
CFG_AxPPU 属性值为 2500
CFG_AxPPUDenominator 属性值为 1
浮点 PPU 是当用户的距离单位对应的 PPU 不能为整数时,可通过设置浮点 PPU 实现。
例如客户移动 10mm,需要 1005 个脉冲,所以每移动 1mm,所需要的脉冲数为 100.5 个
pulse。为了解决距离误差,可通过设定 PPU 的分母,得到 double 类型的实际 PPU 参
与距离与速度等的计算中,
因此可设置:
CFG_AxPPU 属性值为 201
CFG_AxPPUDenominator 属性值为 2
特别注意:
PPU 分子和 PPU 分母属性需首先设定,否则会影响其他 PPU 相关属性如
HomeCrossDistance。通过 PPU 分子和 PPU 分母可实现实际 PPU 为浮点值的问题,但是
因为内部机制的限制,尚存在一些限制。例如,PPU 分子 /PPU 分母得到实际 PPU 为
3.33333333…, 当dis = 100.0PPU,当内部将 dis 转成实际 pulse 数时取整为:
100.0*3.33333333… 为 333, 最终得到的位置转成实际PPU 后为:333/3.33333333…
约为 99.9.,这就不是100个PPU了,得到的值与设定的值略有差别,所以在整个系统中尽量避免出现这种分子和分母出现浮点数的情况。
概念解释
1、螺距:螺距是螺纹上相邻两牙在中径线上对应两点间的轴向距离,也就输轴转一圈对应轴在轴向移动的距离;
2、导程:导程是指同一螺旋线上相邻两牙对应点的轴向距离(注意当螺纹线数为1时,螺距=导程
当螺纹线数大于1时,螺距=导程/线数)
3、齿轮齿数与转速的关系:
互相咬合的齿轮,他们的齿数和转数成反比,因为互相咬合的齿轮通常是一个齿轮的转动带着另一个齿轮的转动,一个齿轮转动一个齿,另一个齿轮也转动一个齿,无论怎么转,最后两个齿轮转动的齿的总数是一样的,齿轮转动的总齿数等于齿轮的齿数乘以转数,及两个互相咬合的齿轮的齿数与转数的及时相等的。
互相咬合的齿轮的齿数与转数成反比。
转速n只与齿数z、以及传动比ι有关,它们之间的关系为: ι=Z2/Z1=n1/n2 ι——传动比
Z1——主动齿轮的齿数 Z2——被动齿轮的齿数 n1——主动齿轮轴的转速 n2——被动齿轮轴的转速



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











