







1、我们经常使用propertyGrid绑定一个含有众多属性成员的类的对象,从而实现对这个类中属性参数值的设置和读取,如下图:

我们可以看出,这个类如下:
public class MotionParameter
{
[DisplayName("起始速度"), Description("板卡的起始速度"), ReadOnly(false )]
public double StartVel { get; set; }
[DisplayName("高速运行速度"), Description("板卡告诉运行时的速度"), ReadOnly(false )]
public double Vel { get; set; }
public double Acc { get; set; }
public double Dec { get; set; }
public double Dis { get; set; }
public double time { get; set; }
public Jerk jerk { get; set; } = Jerk.S;
}
对于以上用法,在运动控制中只能用于设置一个轴的参数,但是当一台机器有很多个轴的时候,比如四个轴,难道我们要使用四个propertyGrid控件吗?答案是否定的,我们可以有更好的方法,利用嵌套属性来实现,先看效果图,如下:
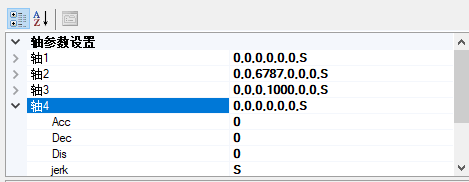
也就是说我们新建一个类,这个类中的属性成员的类就是之前提到的MotionParameter自定义类,而不是一直系统固有的类,代码如下:
[Serializable]
public class DeltaMotionParameter
{
[DisplayName("轴1"), Category("轴参数设置"), Description("")]
public MotionParameter motionParameter1
{
get
{
return Axis1Parm;
}
set
{
Axis1Parm=value ;
}
}
[DisplayName("轴2"), Category("轴参数设置"), Description(""), ReadOnly(false)]
public MotionParameter motionParameter2
{
get
{
return Axis2Parm;
}
set
{
Axis2Parm=value;
}
}
[DisplayName("轴3"), Category("轴参数设置"), Description(""), ReadOnly(false)]
public MotionParameter motionParameter3
{
get
{
return Axis3Parm;
}
set
{
Axis3Parm=value ;
}
}
[DisplayName("轴4"), Category("轴参数设置"), Description(""), ReadOnly(false)]
public MotionParameter motionParameter4
{
get
{
return Axis4Parm;
}
set
{
Axis4Parm=value ;
}
}
private MotionParameter Axis1Parm = new MotionParameter();
private MotionParameter Axis2Parm = new MotionParameter();
private MotionParameter Axis3Parm = new MotionParameter();
private MotionParameter Axis4Parm = new MotionParameter();
}
再结合序列化/反序列化最终可以实现参数的设置。
















 317
317











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











