







一、卡尔曼
给出写得很好的文章链接:
无人驾驶技术入门(十三)| 手把手教你写卡尔曼滤波器 - 知乎
关于卡尔曼及卡尔曼增益的理解【精】_Jack Ju的博客-CSDN博客
对卡尔曼滤波中增益系数K表达式的理解_卡尔曼增益矩阵k_少年芒果君的博客-CSDN博客
1. 概念
卡尔曼滤波器:根据上一时刻的状态,预测当前时刻的状态,将预测的状态与当前时刻的测量值进行加权,加权后的结果才认为是当前的实际状态,而不是仅仅听信当前的测量值。
状态转移矩阵F:指事物由一种状态转移到另一种状态的概率。
状态协方差矩阵P:表示系统的不确定程度,在卡尔曼滤波器初始化时会很大,随着越来越多的数据注入滤波器中,不确定程度会变小。
卡尔曼增益K:,就是求y值的权值。δp越大时,k越大,这样对于预测来说它的噪音的不确定性变大,所以我们相信更传感器的测量值;δp越小的时候,k越小,这样对于预测来说它的噪音不确定性变小,所以我们更相信预测的值。
2. 滤波原理
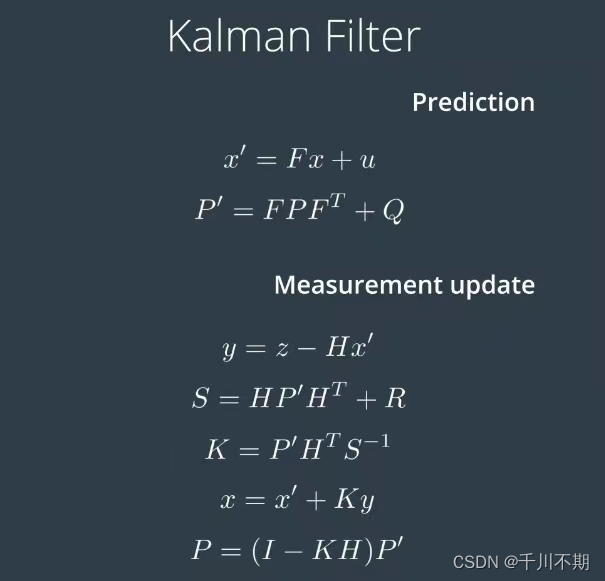
第一步:根据当前状态向量预测下一时刻状态向量;根据当前系统稳定性预测下一时刻系统稳定性。
第二步:求得卡尔曼增益
第三步:更新状态向量x和系统不确定度P。
二、扩展卡尔曼滤波
给出写得很好的文章链接:
扩展卡尔曼滤波(Extended Kalman Filter,EKF):是标准卡尔曼滤波在非线性情形下的一种扩展形式,EKF算法是将非线性函数进行泰勒展开,省略高阶项,保留展开项的一阶项,以此来实现非线性函数线性化,最后通过卡尔曼滤波算法近似计算系统的状态估计值和方差估计值。
与卡尔曼滤波的不同点:主要是是将非线性系统近似为线性系统,然后照着卡尔曼滤波来就行了。
三、粒子滤波
写不出来,直接上原文:

四、自适应蒙特卡罗定位算法
后续文章慢慢分析。。。
















 519
519











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











