







关于amcl
amcl的英文全称是adaptive Monte Carlo localization,其实就是蒙特卡洛定位方法的一种升级版,使用自适应的KLD方法来更新粒子,这里不再多说(主要我也不熟),有兴趣的可以去看:KLD。
而mcl(蒙特卡洛定位)法使用的是粒子滤波的方法来进行定位的。而粒子滤波很粗浅的说就是一开始在地图空间很均匀的撒一把粒子,然后通过获取机器人的motion来移动粒子,比如机器人向前移动了一米,所有的粒子也就向前移动一米,不管现在这个粒子的位置对不对。使用每个粒子所处位置模拟一个传感器信息跟观察到的传感器信息(一般是激光)作对比,从而赋给每个粒子一个概率。之后根据生成的概率来重新生成粒子,概率越高的生成的概率越大。这样的迭代之后,所有的粒子会慢慢地收敛到一起,机器人的确切位置也就被推算出来了。

这幅图模拟了一个一维机器人的粒子更新,机器人下面那些想条形码一样的竖条就是粒子的分布了,可以看到粒子随着机器人的移动与更新会逐渐的收敛到机器人的正确位置上。
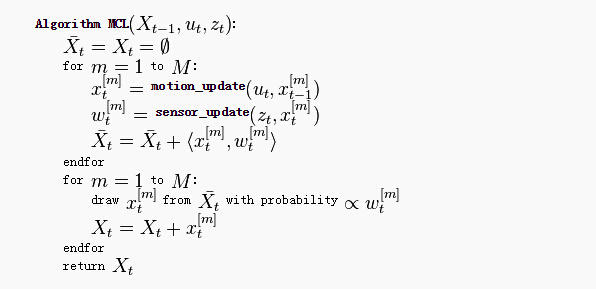
mcl算法步骤图:
wiki链接
ros中的amcl
ros中使用的就是自适应的蒙特卡洛定位法。
订阅的主题
- scan (sensor_msgs/LaserScan)
Laser scans. - tf (tf/tfMessage)
Transforms. - initialpose (geometry_msgs/PoseWithCovarianceStamped)
Mean and covariance with which to (re-)initialize the particle filter. - map (nav_msgs/OccupancyGrid)
When the use_map_topic parameter is set, AMCL subscribes to this topic to retrieve the map used for laser-based localization. New in navigation 1.4.2.
实际上初始位姿可以通过参数提供也可以使用默认初始值,我们主要是要将scan(激光)、tf和map主题提供给amcl。
发布的主题
- amcl_pose (geometry_msgs/PoseWithCovarianceStamped)
Robot’s estimated pose in the map, with covariance. - particlecloud (geometry_msgs/PoseArray)
The set of pose estimates being maintained by the filter. - tf (tf/tfMessage)
Publishes the transform from odom (which can be remapped via the ~odom_frame_id parameter) to map.
如果纯粹是为了显示一下机器人的位姿(in rviz)我们只需要tf主题就够了。
tf tree
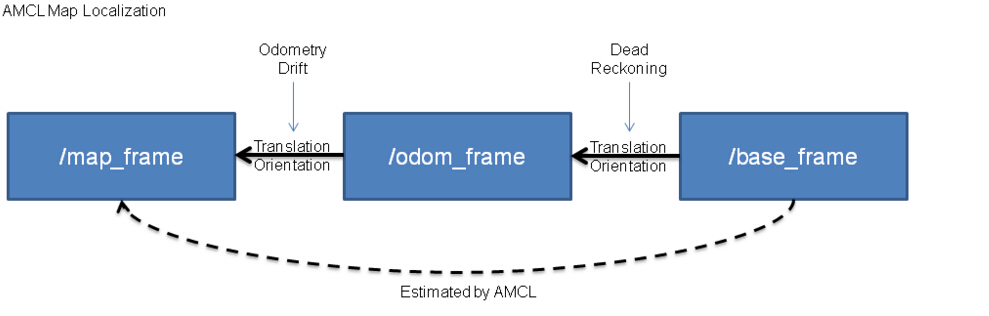
我们需要将base_link,odom,map三个frame连接起来。
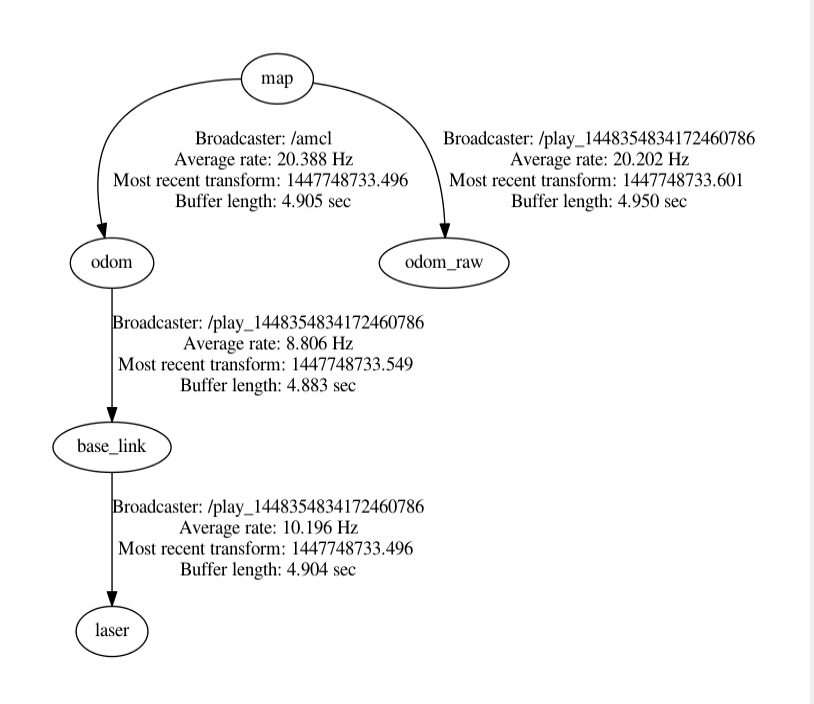
上图是我自己的tf连接图
example
<?xml version="1.0"?>
<launch>
<!-->
<node pkg="beginner_tutorials" type="talker" name="talker"/>
<-->
<node pkg="map_server" type="map_server" name="map_server" args="/home/zqq/map.yaml"/>
<!-- amcl node -->
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<remap from="scan" to="scan"/>
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="use_map_topic" value="true"/>
<param name="odom_model_type" value="omni"/>
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.5" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="300"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.1"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.1"/>
<param name="odom_alpha2" value="0.1"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.1"/>
<param name="odom_alpha4" value="0.1"/>
<param name="laser_z_hit" value="0.9"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_min_range" value="1"/>
<param name="laser_max_range" value="5"/>
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.1"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
</node>
</launch>这是我自己的一个launch文件,分别调用了map_server节点和amcl节点,map_server节点读取了一个我自己之前用gmapping制作的地图(详细教程:戳这里),之后调用amcl节点,订阅了scan激光主题,设置了一些参数,参数详细作用:戳这里。
注意一定要将tf tree设置好!!坑了大部分人的都是这个tf。
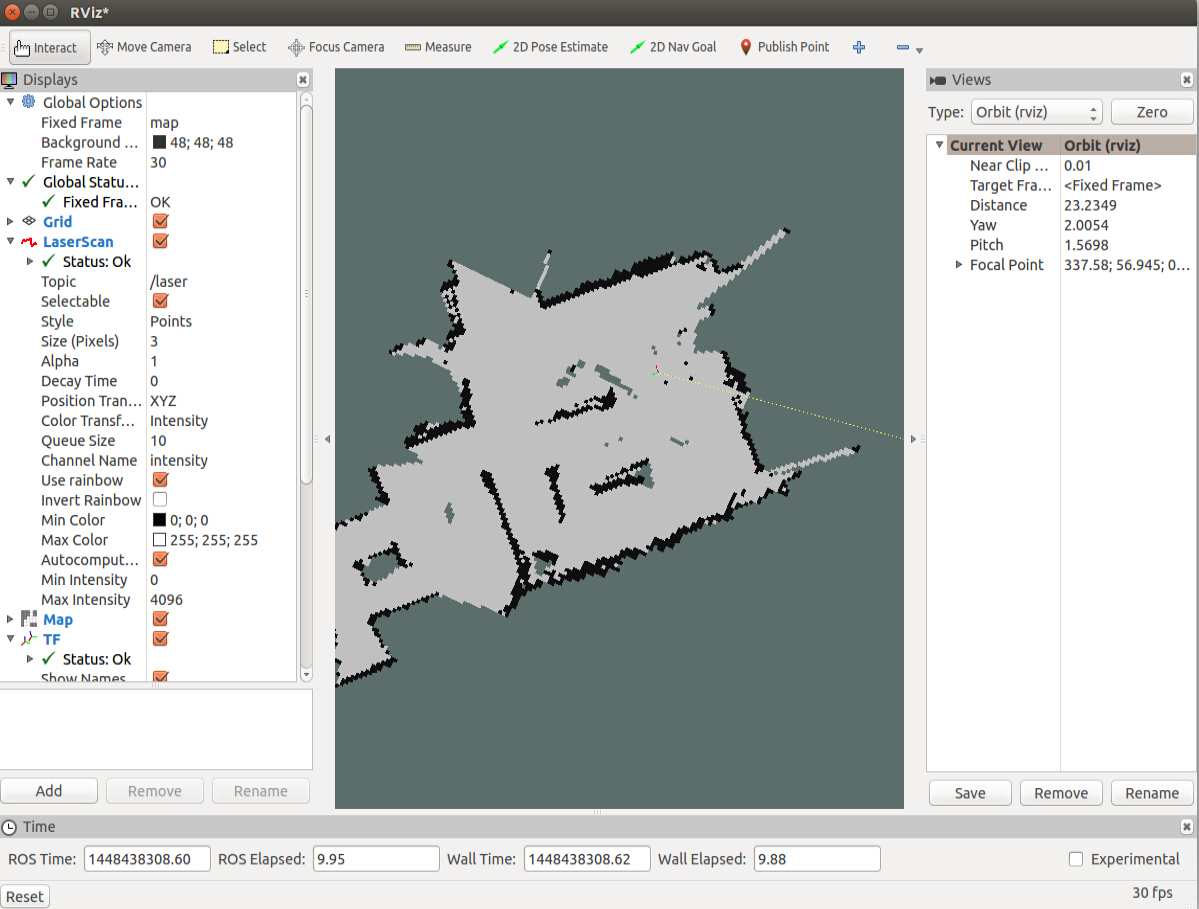
tf显示的就是当前的机器人位姿。
注意:要将rviz的fixed frame设成map,因为map才是global_frame_id。
2015-11-27增补
今天才发现了rviz居然连粒子都可以显示,显示让我对amcl粒子更新有了更深刻的理解。
首先在参数表里面有几个比较重要的参数。
~initial_pose_x (double, default: 0.0 meters)
Initial pose mean (x), used to initialize filter with Gaussian distribution.
~initial_pose_y (double, default: 0.0 meters)
Initial pose mean (y), used to initialize filter with Gaussian distribution.
~initial_pose_a (double, default: 0.0 radians)
Initial pose mean (yaw), used to initialize filter with Gaussian distribution.
~initial_cov_xx (double, default: 0.5*0.5 meters)
Initial pose covariance (x*x), used to initialize filter with Gaussian distribution.
~initial_cov_yy (double, default: 0.5*0.5 meters)
Initial pose covariance (y*y), used to initialize filter with Gaussian distribution.
~initial_cov_aa (double, default: (π/12)*(π/12) radian)
Initial pose covariance (yaw*yaw), used to initialize filter with Gaussian distribution.
这个代表了你初始化粒子时粒子分布的一个状态,注意要把方差设的大一些,要不所有例子上来就是一坨的就没法玩了。
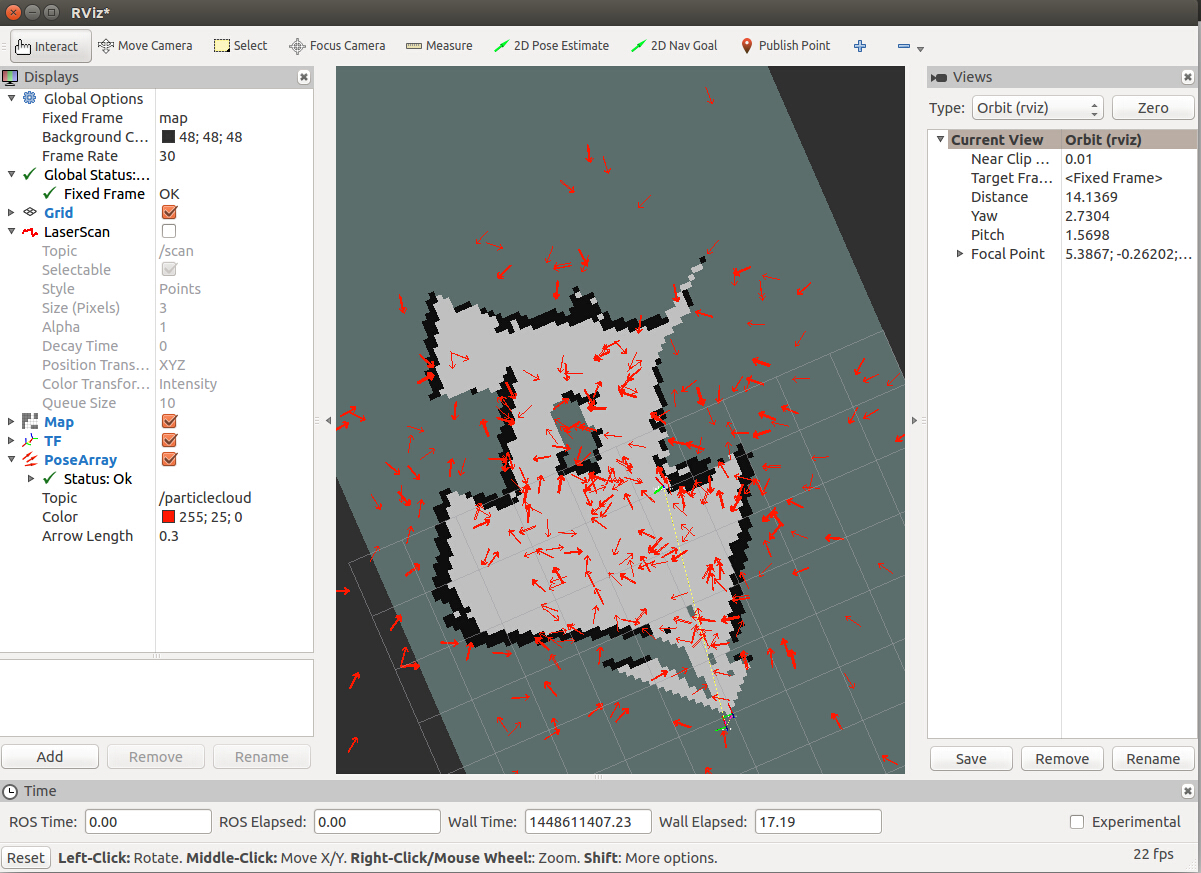
上图是粒子的一个初始状态~我设的方差比较大~所以分布很大。
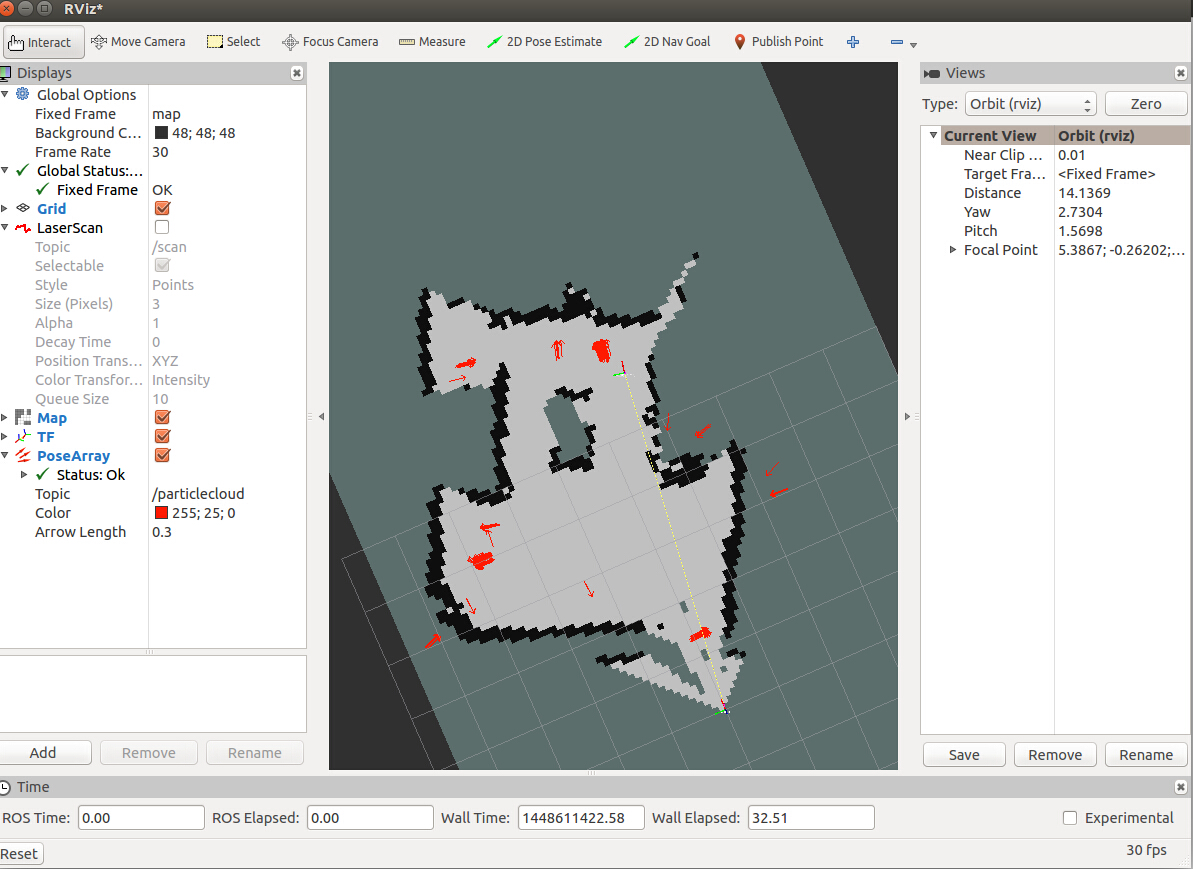
上图是更新了一段时间之后~粒子逐渐趋于稳定
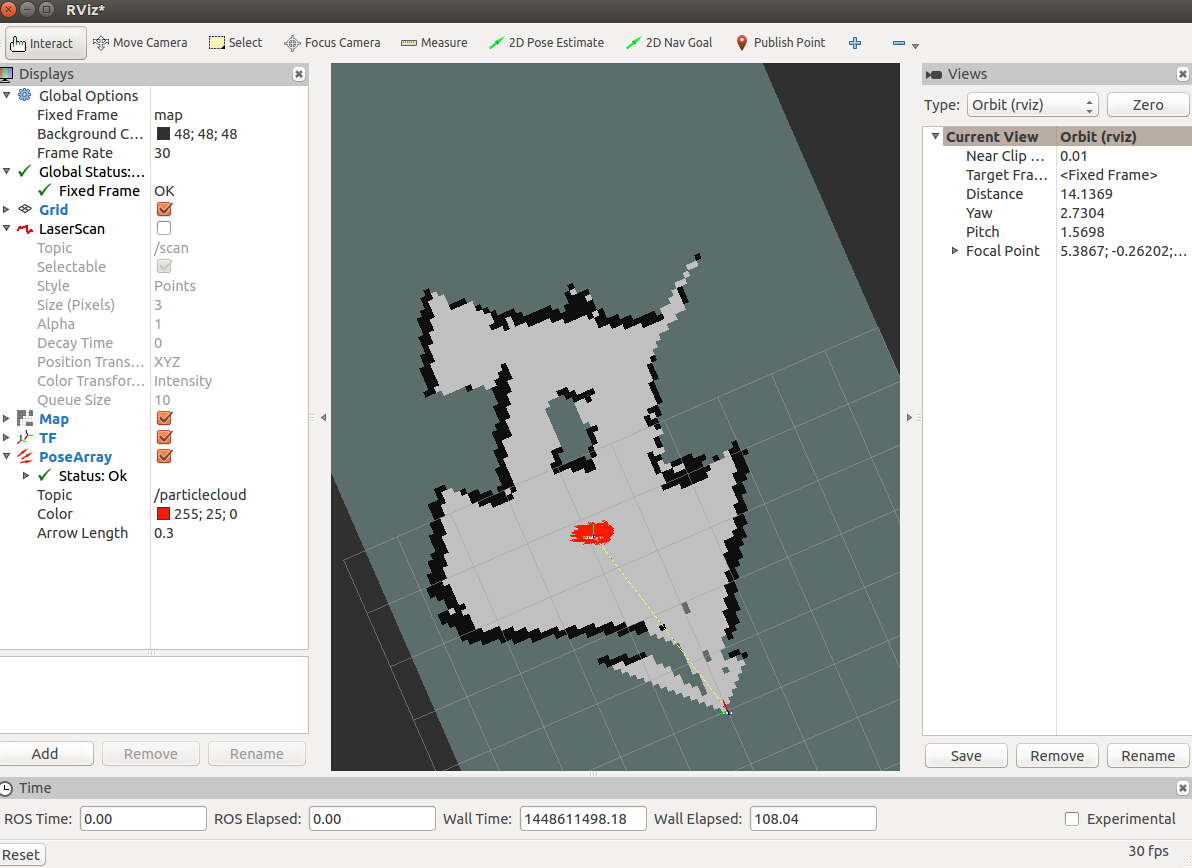
上图为最终状态,趋于稳定

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









