







点击阅读原文,阅读最新资讯。
你在使用那智机器人的时候
是否感觉有些束手束脚?
是否感觉常常需要修改配置?
改完配置也不记得下一次在哪里改?
一起来看看:
为了能够修改到需要的配置一定要先切换用户为SPECIALIST;
1.按R键
2.输入“314”按回车键
3.输入“12345”按回车键
提示如下图则成功切换;
本文介绍的六个需要修改的配置主要集中在两个地方
①操作和示教条件;
②示教、再生条件;
以下介绍的配置均不是初始系统的默认配置,默认配置不作介绍,这样可以偷不少懒!
示教和操作条件
1.操作和示教条件:点击屏幕左侧“常数设定”,选择“5 操作和示教条件”,选择“1 操作条件”;
配置1:“8 动作可能上下的步骤选择”修改为“有效”;
在程序和姿势文件中,可以通过“动作可能键”(Shift)+“上下键”(转轮)可以移动蓝色选中条,更改选中的程序行或姿势文件行;能够轻松的进行单步调试,单个姿势文件的点位修改;
配置2:“12 机器人语言(GETP,GETPOSE,LETPOSE)”修改为“有效”;
在程序中可以使用GETP,GETPOSE,LETPOSE等指令,能够方便快捷不通过系统固定位置抓取当前机器人位置。
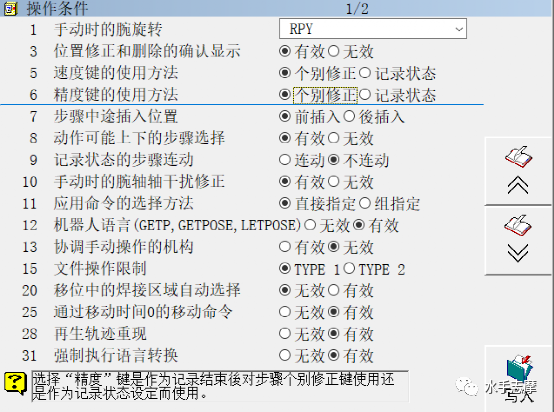
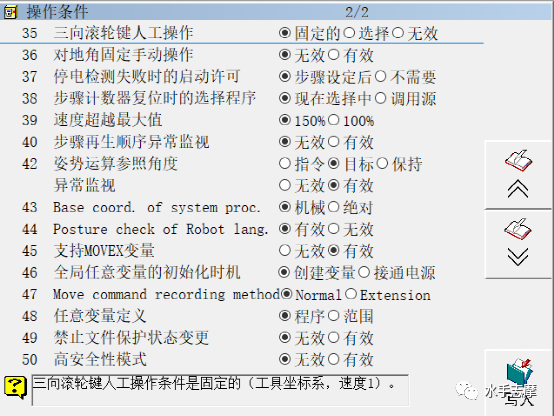
配置3:“支持MOVEX变量”修改为“有效”;
可以在MOVEX指令中使用变量,替换CONF等参数;通过修改对应变量,可以一次性修改程序中更多的移动指令的同一参数。
示教、再生条件
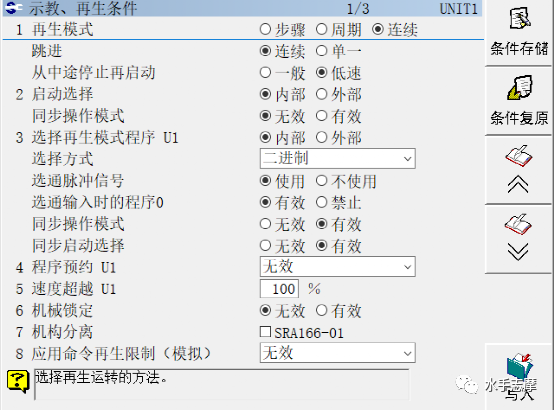
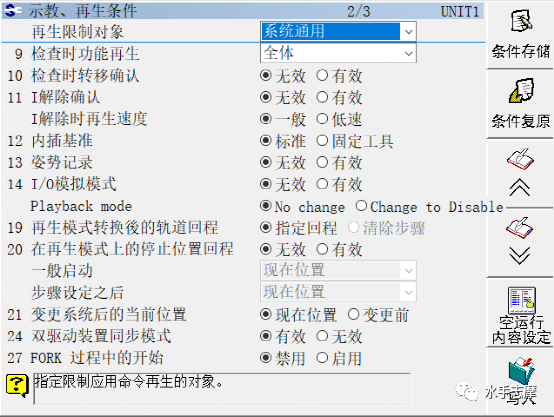
2.示教、再生条件:点击屏幕右上角“示教、再生条件”;
配置1:“1.再生模式”修改为“周期”或“连续”;
打自动模式以后,按启动按钮才能连续运行,否则为步进状态;
配置2:“1 从中途停止再启动”修改为“低速”;
可以有一个逐渐加速的过程,降低危险性;
配置3:“检查时功能再生”修改为“全体”;
手动运行过程中才能执行非移动指令,特别是在有逻辑运算和计算的程序中尤为重要;
笔者近期正使用NACHI机器人,这六个配置实乃会战中决胜千里必备,带来的好处尚需细细品味。
各位看官可还有自己秘籍?可在留言区分享一二?

扫码关注我的微信公众号,第一时间查看更新
我们悄悄对视
灵魂像一片画展中的田野

















 839
839

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









