






本人只是一个笨比本科生写这些文章只是为了记录学习过程如有错误欢迎指出.
EtherCAT:是一种高性能的实时以太网通信协议,用于现场总线和工业自动化领域。它通过在标准以太网协议中添加一个EtherCAT帧头(以太网最小帧64字节)头部有几个帧定义EtherCAT协议后面的数据也就是CANopen协议,将传感器、执行器和其他设备连接到一个实时控制网络上,从而实现快速、可靠、低成本的数据交换和控制。EtherCAT=在以太网上的CANopen.
基本接线:
我手里的是SV660NS2R8I单相(给我的三相我也用不了)
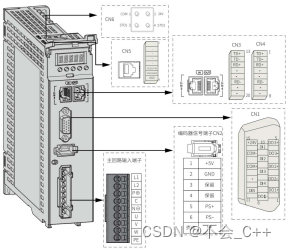
L1接火线(棕色) L2接地线(蓝色) 黄绿是地线接在伺服控制器留给你的接地端(外露铁片)
P和C是留给制动电阻的我没有汇川没给我空载或者负载小也用不上
U V W PE 分别就是伺服电机的驱动线
CN2是编码器接线端子
CN3 IN端是EtherCAT总线进入端
接完后的样子:
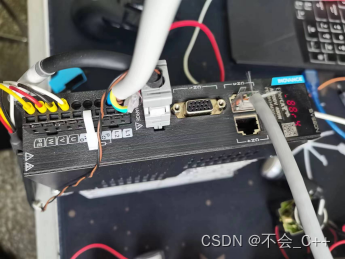
对于PLC从EtherCAT端出来接到IN即可
当一切准备就绪plc 伺服控制器都上电 伺服控制器默认显示为:18ry

如果不是可以 摁下MODE输入 H02.31=1来恢复出厂设置 恢复
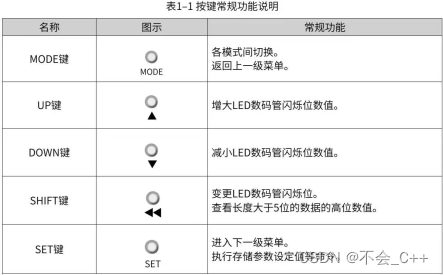
后重上电即可
将H5U链接电脑我这里通过USB连接,打开autoshop;
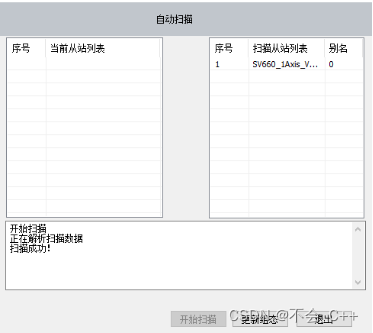
右键EtherCAT选择自动扫描
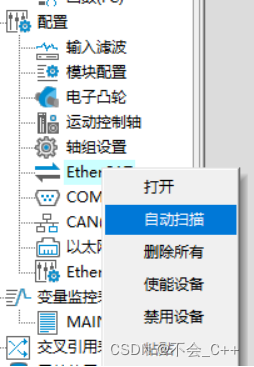
点击"开始扫描"扫描完毕后左侧会出现从站信息点击”更新组态”
运动控制轴设置:
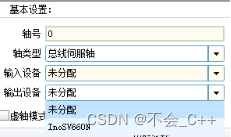
右键运动控制”添加轴”

下面会出现”Axis_0”这是默认命名右键可以重命名
双击进入在基本设置这里轴类型默认为总线控制伺服轴不用管,初始设备选InoSV660N
单位换算设置:
电机/编码器旋转一圈的脉冲数:(汇川给我提供的是绝对编码器也就是23位编码器的伺服电机MS1H1-40B30CB-T331Z)
那么它的编码器分辨率:十进制为8388608 十六进制位800000

旋转一圈移动量根据你的机械结构来定我这里就用1unit
在线调试:
将改完参数后的程序下载 到PLC中 再开启监控
到PLC中 再开启监控
此时观察ethercat状态都是 通信正常如果都是红叉可以选择将伺服控制器重
通信正常如果都是红叉可以选择将伺服控制器重
伺服控制器显示屏显示88ry时就是运行状态
点击”进入伺服调试” 点击”使能”
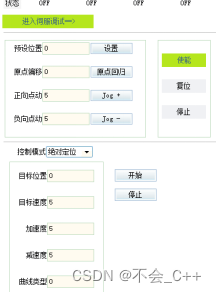
此时可以正常调试控制模式选”相对定位”目标位置”1”点击”开始” 可以观察到电机转了一圈;
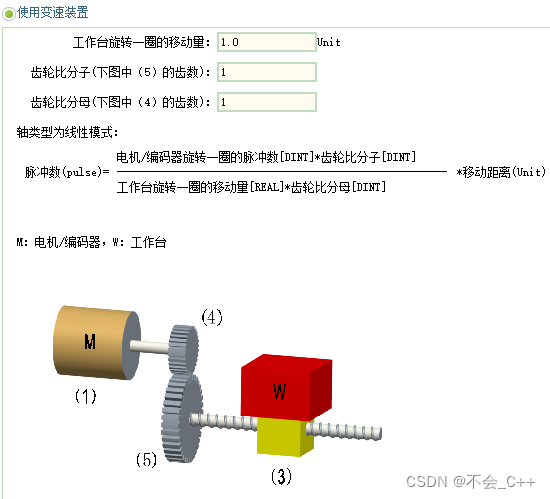
补充变速装置:
这里工作台转动一圈不指电机的一圈,而是分子齿轮的一圈
将分子和分母齿轮对应的齿数填入(假如分子填入300,分母填入100那么工作台旋转一圈电机就会旋转三圈)

















 3135
3135

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









