







标准化ISO11898和ISO11519
(1)多主控制:在总线空闲时,所有单元都可以发送消息(多主控制)。最先访问总线的单元可获的发送权,多个单元同时发送时,发送高优先级ID消息的单元可获得发送权,所有消息都以固定的格式发送。
(2)系统的柔软性:与总线相连的单元没有类似于“地址”的信息。因此在总线上增加单元时,连接在总线上的其他单元的软硬件及应用层都不需要改变。(ID只是表示优先级)
(3)通信速度:在同一个网络中,所有单元必须设定统一的通信速度,否则,就会出错。
(4)远程数据请求:可通过发送“遥控帧”,请求其他单元发送数据。
(5)错误检测功能、错误通知功能、错误恢复功能:所有单元都可以检测错误;检测出错误的单元会立即通知其他所有单元;正在发送消息的单元一旦检测出错误,会强制结束当前的发送。强制结束发送的单元会不断反复地重新发送此消息直到成功发送为止。
(6)故障封闭:CAN可以判断出错误的类型是总线上暂时的数据错误(如外部噪声)还是持续的数据错误(如单元内部错误)。由此功能,当总线上发生持续数错误时,可将引起此故障的单元从总线上隔离出去。
(7)连接:CAN总线理论上可连接单元数是没有限制的,但实际上为提高通信速度,降低负载,会控制连接数量。
几个重点:
1、隐性位和显性位:CAN总线为“隐性”(逻辑1)时,CAN_H和CAN_L的电平为2.5V(电位差为0);CAN总线为“显性”(逻辑0)时,CAN_H和CAN_L的电平分别是3.5V和1.5V(电位差为2.5V)。
2、数据帧





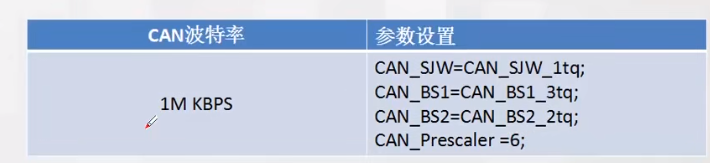
(3)波特率






















 5982
5982











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









