







 本文深入解析了CAN总线的工作原理和技术细节,包括STM32中CAN总线的配置、波特率测量方法、数据帧结构及远程帧的作用。此外,还探讨了CAN总线的位填充机制和物理层实现。
本文深入解析了CAN总线的工作原理和技术细节,包括STM32中CAN总线的配置、波特率测量方法、数据帧结构及远程帧的作用。此外,还探讨了CAN总线的位填充机制和物理层实现。
整理自网络::
stm32的can总线是在APB1上的,stm32f10x的主频是72Mhz,can外设时钟是36Mhz,stm32f2xx的主频是120Mhz,can外设时钟是30Mhz。。。
STM32 APB1和APB2区别:
APB2负责AD,I/O,高级TIM,串口1。
APB1负责DA,USB,SPI,I2C,CAN,串口2345,普通TIM
can总线电气特性

做一想要从车上测出can总线上的数据还不太容易。
于是我首先使用示波器(我使用的示波器型号是TDS 220)来找出汽车上can总线的接口,然后测出can总线的波特率,测量波特率的步骤如下:
1、将示波器的两个接口(接地和探头)分别接在can总线的两条线(CAN_H和CAN_L)上,
这里需要注意如果CAN线上需要接一个120欧姆的负载电阻,否则波形是不规整方波,
接上负载之后才是规整的方波。
2、此时如果can线上有数据,则会在示波器上显示出方波如图1所示。(这里使用示波器的RUN/STOP按钮捕捉波形)

图1
2、但是此时因为示波器显示的数据太多还无法读取单个脉冲的周期,
所以需要调节示波器的X轴的每格所代表的周期(调节SEC/DIV旋钮)
然后使用RUN/STOP按钮重新捕捉波形得到图2所示的波形,
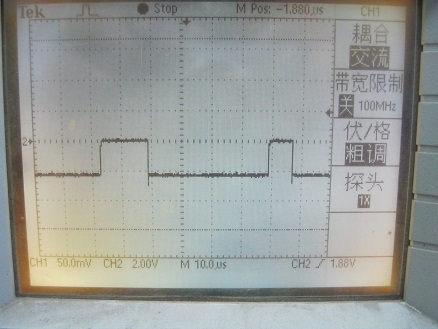
图2
3、最后将图2中宽度较小的脉冲再次放大(调节SEC/DIV)直到图3所示,这时每格代表1us
可以看到这个脉冲跨度为8us

图3
所以最终得到该can总线的波特率为1s/8us=125K
在车辆电子网络中,CAN总线是一个重要的协议。它具有一个高达1兆bit的比特率, 并提供简单的微处理器网络,这需要用到一种被称为CAN控制器的专用CAN总线芯片叫做CAN控制器。
CAN的数据传输报文就是数据帧。数据帧允许有一个比较长的ID,所以称为可扩展帧。
适用于某些应用中的,但不是用于汽车中的是远程帧。远程帧允许一个节点响应一个特定的ID。
CAN功能是非常齐全的。这意味着它不仅仅发现很多的错误,同时能够实现自动化传输或者节点自动关闭。
CAN使用比特流来通过接收器到发射器。为了适合于特定的位次序,CAN必须使用位填充。位填充在传统示波器上对CAN波形进行解码很困难。
CAN是一个数据链接层。有三种正在使用的物理层来对CAN进行信号的电动发射。
在使用CAN总线的某些地方,可能用FlexRay或者LIN更合适。
CAN总线的详细说明书:can2spec.pdf

一个CAN总线的数据帧
CAN总线数据帧在CAN上运作。CAN的整个过程实质上是在网络控制器之间发送数据,这就需要数据帧来实现这个功能了。
数据帧是以一个单一的SOF(起始帧)位开始的,跟着就是CAN标识符。CAN标识符是用来标识报文和接下来的节点报文。标识符可以有11位长或者是29位长,这主要是根据保留位的状态来决定。

CAN数据帧以一个SOF位开始,跟着就是ID位
在CAN标识符之后,有一个数据段,数据段是以一个数据长度开始的。CAN数据帧能够有0到8个字节,这样它使用4位的编码长度。数据字节直接跟着数据长度。

在CAN帧中数据字节跟着数据长度(DLC)
跟在数据之后是CRC。CRC是基于CAN帧的第一部分在接收器和发射器中进行计算的。如果计算出来的结果与接收器呈现的结果相匹配,则说明正确接收数据。

CAN 的CRC检查数据的完整性,同时ack表示从另一个节点接收
跟着CRC的是Ack 场,这个场是在所有的其他的正确接收帧的网络节点上进行设置的。
Ack位后,有一段静态时间,它称为紧跟着一个最小的内插帧空间的帧空间结束符。

可扩展标识符CAN 帧使用29位用于辨识目的,而不是标准的CAN帧的11位。由于这个额外的ID空间增加了20位(18个ID和两个保留位),它通常不使用于希望得到最高性能的网络当中。
在J1939和GMLAN协议中,较大的ID分为不同的部分,每一个部分都有它的意义。比如,对于J1939和GMLAN的最低的8个ID位表明了一个字节的源地址。

单线CAN扩展ID是有29位长(还没有算入缓冲位)。许多系统设计者不使用这个ID长度,
因为它要求比较高的费用
CAN总线远程帧是可选帧,它用于请求数据。远程帧没有包含数据段,即使数据长码位大于0。你能够从RTR位的状态来判决一个帧是否是远程帧(RTR=1)。远程帧通常不使用在汽车的应用当中。

在这个CAN L波形中显示了一个远程帧

CAN波形是一系列的位。由于在CAN总线节点之间没有共享时钟,那么对于所有的节点则一定有方法从波形中得到时钟信息。因此接收器使用CAN波形转换来使得发射器与接收器实现同步时钟。
为了确保有足够的转换,CAN总线执行位填充功能。位填充在连续5个相同的位之后,插入一个额外的码流的相反位。由于填充位的出现要根据消息序列的容量,CAN帧的长度要根据在帧里面的数据位进行改变。这些额外的填充位自动被接收器丢掉,因此在CAN节点的应用软件中就从来不会接触到这些填充位了。

填充位,用黄色突出,增加消耗在一个CAN报文中。这个报文有13个额外的填充位
CAN协议介绍了1s和0s是如何使用在通讯当中的。CAN协议没有介绍发射1s和0s信号的电气方法。
最普遍流行的物理层被称为双线物理层。这个物理层使用双线CAN H和CAN L。这些线在不同的电压方向(对应着不同的信号传输)上传送1或者0。
对于特定的汽车低速应用,介绍两个其他的物理层。它们是单线CAN和低速容错CAN。如果有一条线路断了。低速容错CAN总线将会提供容错信息。
单线CAN是一个物理层,它是由普通的发动机生成的。它允许CAN使用一条单线在低比特率(如33.3Kbps)的情况之下进行通讯。同时对于闪存编程允许一个高速模式。最后,虽然很多CAN收发器仅仅提供了1或者0,但是单线仍能够提供一个被称为高压模式的第三状态。这种模式能够使得CAN节点的电源管理有选择性。

这是两个不同的单线CAN帧。一个在高电压模式下发送,另一个为正常电压

















 1361
1361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









