






很多人都熟悉GNSS模糊度固定的过程,首先求模糊度实数估值,然后固定模糊度为整数,最后计算整数条件下其他参数(坐标等)的估值。
但是为何是这样的一个流程,其中的数学推导过程是怎么样的?我个人比较疑惑,因此仔细阅读了Tenissen大佬的文章《Least-Squares Estimation of The Integer GPS Ambiguities》,1993在此将我的理解分享给大家。
注:论文中提到 为非线性变换时,许多问题会变复杂,本人数学不好看不太懂,又因为GNSS模糊度求解中不涉及复杂的变换,因此下面的讨论,均在
为线性变换,且
中均为实数的前提下展开。
一、GNSS观测方程模型
在本文中,我们将GNSS观测方程模型写作以下形式:
(1)
其中各符号含义为:
- 观测值向量
- 测站坐标等参数向量,实数
- 模糊度参数向量,整数
、
- 坐标参数向量、模糊度参数向量的设计矩阵
- 未模型化的误差向量
参数估计遵循最小二乘准则,即:
(2)
也即:
(3)
其中 是观测值
的斜因数阵(或方差-协方差阵),它的逆即为观测值权阵。
二、最小二乘估计
1.等权的情况
下面先给出一般最小二乘解的公式:
对于观测方程 :
(4)
遵循最小二乘准则:
(5)
其中,,也就是向量
的模的平方。
那么,其最小二乘解应该为:
(6)
(7)
该最小二乘问题的求解,从投影的角度很好理解:
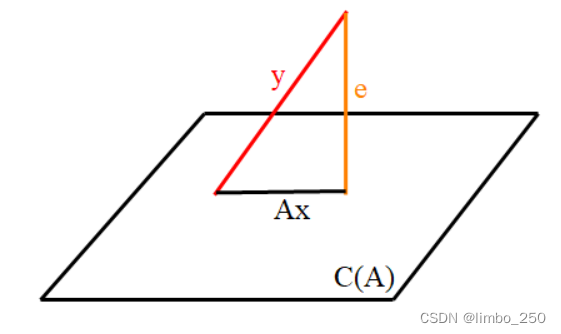
记A的列向量张成的空间为 ,那么
在
内,残差
为
与
的差,最小二乘即是找到一个
,使残差向量
的模最小。
很容易想到,残差向量 与
垂直时,其模最小,再根据向量与空间垂直的性质,有:
(8)
根据(8)式即可求得(6)、(7)式的最小二乘解。
2.加权的情况
由于观测值精度不同,我们会对不同的观测值赋予一个权重,这时观测方程仍为(4)式,但最小二乘准则变为了(2)式, ,其中:
(9)
也即:
(10)
其中 为观测值
的方差,协方差矩阵,
即为权阵。
我们可以用目标函数对 求导来求解,令
(11)
可以解得:
(12)
此外,同样也可以从投影的角度来分析求解这个问题(个人理解,如有问题,请多批评指正):
和上述的内容相同,我们知道,当残差向量 与
垂直时,其模最小,但是由于此时空间的度量发生了变化,向量内积的定义发生了变化(马氏距离?):
(13)
因此,由 与
垂直得到:
(14)
由式(14)我们同样可以得到式(12)的解。
三、混合整数最小二乘问题
对于(3)式的最小二乘问题,我们不能直接遵循(5)式的最小二乘准则求解,因为其参数 虽然不受限制,但
被限制为整数。因此我们将这种问题称作混合整数最小二乘问题。
要解决混合整数最小二乘问题,我们先从整数最小二乘问题看起:
1.整数最小二乘
我们将(4)(5)式中的 限制为整数,得到如下的两个式子,并将这样的问题称为整数最小二乘问题:
(15)
(16)
式(15)(16)与(4)(5)的区别就在于参数 是否限制为整数,我们可以想象,当
不受限制时,
是可以铺满
中的所有点的;但
限制为整数后就不再如此。
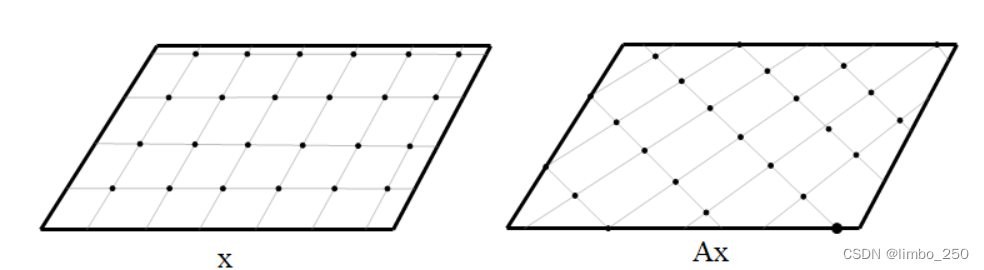
时,可以想象n维空间中有无数与坐标轴垂直的网格线,
就在这些格网点上。
经过 的线性转换,n维空间中的格网线被映射到
的子空间中,成维一系列非标准、倾斜的网格线,
则被映射到了新的格网点上,如下图:
结合下图可以看到,当 受到限制后,要想残差向量
的模最小,不能再取
垂直于
时的解,因为根据上面的描述,
只能在格网点上移动,而垂点大概率是不在格网点上的。所以此时要求最小二乘解,是在要格网点中找出一个
,使
的模最小(注意参数上的帽子有正反之分)。
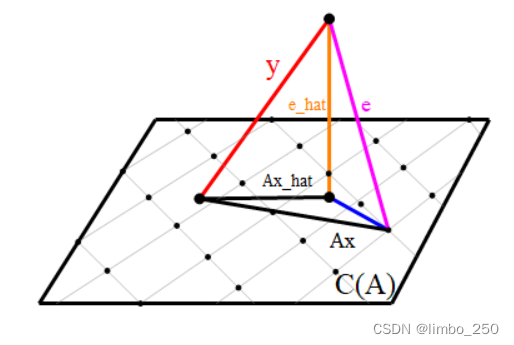
再进一步,我们先记垂直于 的解和残差向量分别为
和
,那么此时:
(17)
由于 ,因此(17)式可进一步分解:
(18)
其中, 的值与
无关,也就是说,式(18)等号右边第一项是常值,因此式(16)的最小二乘问题,转换成求解式(18)中等号右边第二项的最小值:
(19)
或:(20)
其中, 为
的投影矩阵,一般来说,可以由下式计算得到:
(21)
于是,形如式(15)(16)这样的一个整数最小二乘问题,我们可以分两步来解决:
1)求解实数情况下的最小二乘问题,即式(18)等号右边的第一项
2)找到 ,使式(19)(20)取到最小值
式(20)写了一种不一样的形式,其实是因为这种形式在后续的推导中比较方便,式(20)与式(19)其实是一回事,矩阵 将向量
投影到
后就是
,也就是说:
(22)
2.混合整数最小二乘问题
当式(15)中的参数 中一部分限制为整数,另一部分没有限制时,则变为式(1)(2)和(3)的形式,我们将这样的问题称为混合整数最小二乘问题(GNSS参数估计就是一个典型的混合整数最小二乘问题,其中模糊度参数为整数,其他参数为实数):
(1)
(2)
(3)
要解决这个问题,关键一步是对参数 和
进行重组:
(23)
为什么要进行这么奇怪的重组呢,实际上我们是想利用投影矩阵 和
将
分解到
和
的正交补空间里,即:
(24)
结合式(21),有
(25)
于是:
(26)
其中:
(27)
(28)
到这里我们就可以看出为什么要将原来的参数 和
参数进行式(23)展示的重组了。
参数重组之后,我们就可以把式(1)(3)的形式变换成下面的样子:
(29)
(30)
值得注意的是,此时 为实数向量,
为整数向量。
要解决式(29)和(30)的问题,我们主要采取的方法是对式(30)的目标函数进行正交分解,为简化公式书写,在推导过程中我们忽略了下标 ,读者在自行推导的时候请记得加上。
1)第一次正交分解
首先,我们记 和
这两个空间的并集为
。
由式(28)知道, 是
正交补空间内的一个子空间,因此:
(31)
那么,对于空间 的投影矩阵
,有:
(32)
接下来,我们进行第一次分解,将目标函数分解到空间 和
:
(33)
因为 ,
,因此
和
投影到
以后为
,所以式(33)进一步化为:
(34)
可以看到,式(34)等号右边第二项与参数 和
的取值无关,因此目标函数的最小值仅取决于等号右边第一项,也就是说
取到最小值时,
也取到最小值。
2)第二次正交分解
接着我们对 进行正交分解,将式(32)带入,可得:
(35)
显然 经过
投影到
后就是
本身,由式(31)知道,
经过
投影到
后为
。
同样的 经
投影后为
,
经过
投影后为
本身。
于是,式(35)变成:
(36)
经过两次正交分解,结合式(34)和式(36)我们可以看到,目标函数最终被分解为了如下的形式:
(37)
3)求解目标函数最小值
到这里,请回忆最开始的目标:我们是希望求解参数 和
,让式(30)取最小值,根据等式(37),现在这个目标等价于等式右边三项的和取到最小值。
现在,我们来观察等式右边的三项:
首先,第一项 的结果常值的,与参数取值无关。
接着,第二项 ,注意在式(30)中我们提到过
,所以这一项的最小值是 0,并且仅当下式成立的时候取到 0:
(38)
我们将式(21)代入式(38),便可以得到参数 的最小二乘解:
(39)
最后,我们来看第三项:因为 ,想要让这一项取最小值,其实就是我们在第 3.1 节中提到的整数最小二乘问题,也就是我们需要找到一个整数向量
,使
取得最小值。
那么整数向量 为多少的时候能取得最小值呢,本篇文章中我们暂且按下不表,在这里姑且假设,通过某种方法我们已经找到了这个整数向量,我们将它记为
。那么依照式(37)的分解,我们现在便得到了目标函数的最小值,表示为下式:
(40)
同时结合式(39)以及式(23)中参数 与
的关系,我们可以得到参数
的解为:
(41)
至此,混合整数最小二乘问题的求解就完毕了,回顾一下过程,我们通过两次正交分解,将式(30)的目标函数分解为了式(37)右边的三项,因为这三项的结果都是非负的,所以只要这三项分别取得最小值,目标函数就能取到最小值;最后我们依次分析了每一项的最小值为多少,并给出了各项取得最小值时参数的数值。
四、GNSS固定解求解
有了上面的分析,我们再来描述一下GNSS固定解求解的过程。
1.浮点解
一般来说,浮点解指的是我们舍弃模糊度参数的整数性质,将其当作实数,并通过最小二乘准则进行估计所求得的各参数的解。浮点解的求解过程同样可以从 3.2.2 节的正交分解开始,只不过在对式(37)等号右边第三项的最小值进行分析的时候,由于参数 不再限制为整数向量,因此这一项的最小值可以取到 0,此时参数
的解可根据下式求得:
(42)
我们记参数 的浮点解为
,那么同样根据式(23)可以得到非模糊度参数的浮点解为:
(43)
2.固定解
固定解则指的是我么们考虑模糊度参数的整数特性,将参数 限制为整数时,求得的参数
、
的估值。求解固定解的关键在于3.2.3 节所述的找到一个整数向量
(或者说一组整数)使式(37)右边的第三项取得最小值。
很遗憾,我们目前还没有一个像普通最小二乘一样,标准的方法,来找到这样一组整数,通常采取搜索的方式来解决这个问题,比如大家熟悉的LAMBDA方法(具体的方法原理会放到下一篇文章讲解)。
搜索的过程是先确定一个搜索的中心,一般来说,我们会选取模糊度的浮点解为中心(因为模糊度浮点值与固定值虽然不想等,但总归是比较接近的)。然后指定一个搜索范围,即确定以模糊度浮点值为中心的椭球的大小,在这个椭球中会有很多组整数备选解,我们最终会找到一个最优解。
在常见的代码中(如rtklib),我们通常会先根据式(42)、(43)来计算浮点解 、
,然后进行模糊度搜索,得到模糊度的固定解
,最后根据模糊度参数的变化量
得到非模糊度参数的固定解:
(44)
最后:本人才疏学浅,文章中如有问题,还望各位大佬多批评指正,感谢















 494
494











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









