







引言
在现代仓储物流中,自动导引车(AGV)系统扮演着至关重要的角色。通过自动化技术,AGV 能够在仓库中自主导航,完成货物的运输任务,极大提高了仓储效率和准确性。本文将深入分析一套 AGV 系统的代码实现,探讨其核心功能、设计思路以及实际应用场景。
系统概述
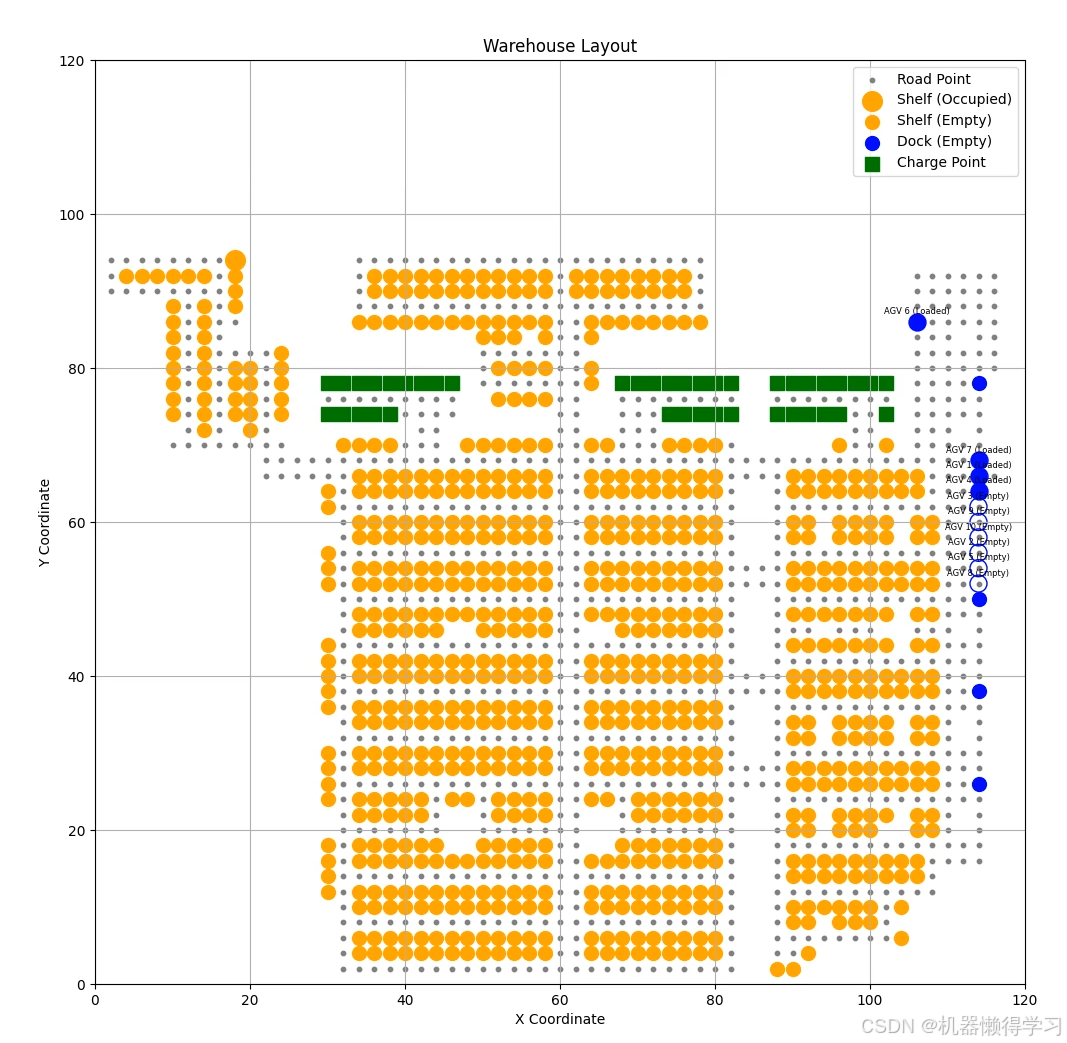
这套 AGV 系统代码由多个模块组成,包括 agv.py、main.py、map_data.py、operation.py、shelf_manager.py 和 visualizer.py。各个模块协同工作,模拟了 AGV 在仓库中的运行过程,从任务分配到路径规划,再到货物的入库和出库操作。
核心模块分析
AGV 类设计
agv.py 是系统的核心,定义了 AGV 的行为和属性。每个 AGV 实例具有唯一标识符、当前位置、电池电量、状态、目的地、速度、负载状态、最大运行距离、当前累计运行距离、任务、路径、充电计数器等属性。
class AGV:
def __init__(self, agv_id, current_position, battery_level=100):
self.agv_id = agv_id
self.current_position = current_position
self.battery_level = battery_level
self.status = "idle"
self.destination = None
self.speed = 1
self.load_status = "empty"
self.max_distance = 2500
self.current_distance = 0
self.task = None
self.path = []
self.charge_counter = 0
AGV 的主要功能包括:
-
任务分配:通过
assign_store_task和assign_retrieve_task方法,AGV 可以接收入库和出库任务。 -
路径规划:使用简单的曼哈顿距离算法计算从当前位置到目的地的路径。
-
任务执行:
perform_action方法让 AGV 在每个节拍中执行一步动作,包括移动、装载、卸载、充电等。 -
电池管理:AGV 会根据电池电量自动前往充电点充电,充电逻辑通过
charge方法实现。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1838
1838

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









