






文章目录
相机标定 Camera Calibration
将相机抽象成针孔模型进行建模,同时因为透镜的存在,光线投影到成像平面的过程中会产生畸变(distortion)
相机标定的目的:寻找像素坐标系到世界坐标系之间的转换关系。
相机标定标什么?
相机内参:fx fy cx cy f(这个可以已知,可能和dx dy 包含到fx fy) 畸变项:k1 k2 k3 p1 p2
相机外参:R T
四个坐标系与针孔模型
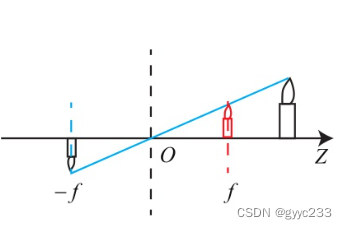
相机针孔模型

- 成像平面(image plane):相机的CCD平面,图像在这个平面上形成,注意后续讨论的image plane一般会是指的呈现正像的那个平面
Virtual image plane。 Focal lenth相机焦距
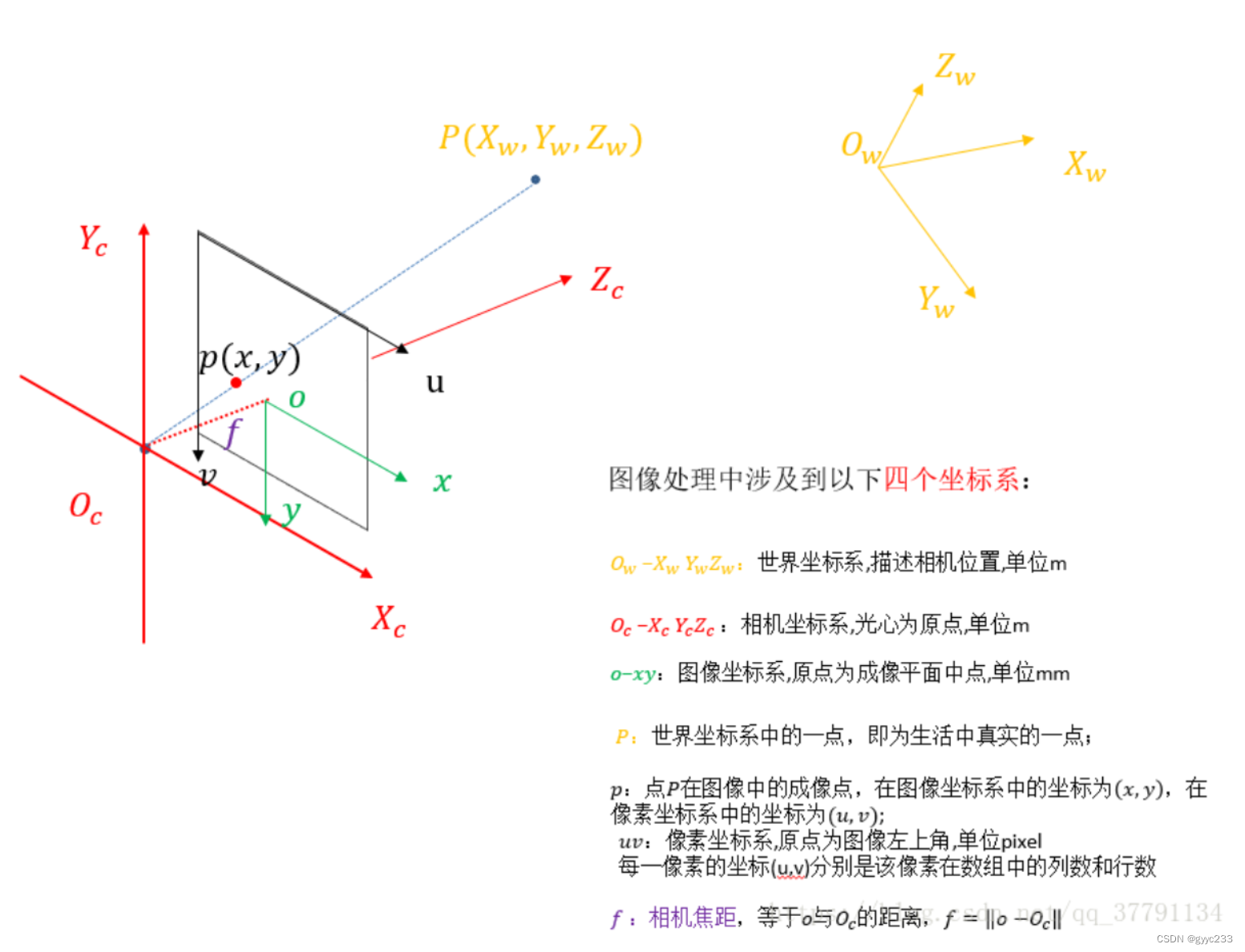
四个坐标系
相机标定涉及以下四个坐标系
- 世界坐标系
world coordinate(xw,yw,zw),是一个三维直角坐标系,以其为基准可以描述相机和待测物体的空间位置。世界坐标系的位置可以根据实际情况自由确定。 - 相机坐标系
camera coordinate(xc,yc,zc),原点位于镜头光心处(针孔模型中的针孔),x、y轴分别与相面的两边平行,z轴为镜头光轴,与像平面垂直。 - 图像坐标系:物理成像平面,原点是相机光轴与成像平面的交点,是图像的中心点,坐标用x,y表示
- 像素坐标系:是图像像素坐标,( u u u, v v v)表示,原点在图像左上角
世界坐标系到相机坐标系转换
[ X c Y c Z c 1 ] = [ R t 0 1 ] [ X w Y w Z w 1 ] \begin{bmatrix}{X_{c}}\\{Y_{c}}\\{Z_{c}}\\{1}\\\end{bmatrix} =\begin{bmatrix}{R}&{t}\\{0}&{1}\\\end{bmatrix} \begin{bmatrix}{X_{w}}\\{Y_{w}}\\{Z_{w}}\\{1}\\\end{bmatrix} XcYcZc1 =[R0t1] XwYwZw1
假设物体在空间中的三维点坐标为(Xw,Yw,Zw),通过一个刚体变换(左乘该刚体 rigid 变换),变换到相机坐标系,此时坐标变为(Xc,Yc,Zc)。为了满足矩阵乘法,添加了1
相机坐标系到图像坐标系的转换
相机坐标系中的点,根据相似三角形关系,映射到光信后方的成像平面(倒像)。根据虚拟成像平面得到正像。
- 根据比例关系,图像坐标系中点的单位为mm
- 相机坐标系点(Xc,Yc,Zc) 图像坐标系点(x,y)
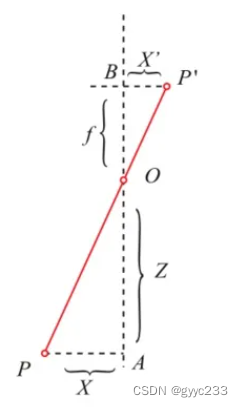
x / f = X c / Z c y / f = Y c / Z c x/f={X_{c}}/{Z_{c}}\\ y/f={Y_{c}}/{Z_{c}} x/f=Xc/Zcy/f=Yc/Zc
x = X c ∗ f / Z c y = Y c ∗ f / Z c x={X_{c}}*f/{Z_{c}}\\ y={Y_{c}}*f/{Z_{c}} x=Xc∗f/Zcy=Yc∗f/Zc
等式两边配平
[ x y 1 ] = [ f / Z c 0 0 0 0 f / Z c 0 0 0 0 1 / Z c 0 ] [ X c Y c Z c ] \begin{bmatrix}x\\y\\1\end{bmatrix} =\begin{bmatrix}{f/Z_{c}}&0&0&0\\0&{f/Z_{c}}&0&0\\0&0&{1/Z_{c}}&0\end{bmatrix} \begin{bmatrix}{X_{c}}\\{Y_{c}}\\{Z_{c}}\end{bmatrix} xy1 = f/Zc000f/Zc0001/Zc000 XcYcZc
图像坐标系到像素坐标系的转换
像素坐标系与成像平面之间,相差了一个缩放和一个原点的平移。我们设像素坐标在 u 轴上缩放了 α 倍,在 v 上缩放了 β 倍。
像素坐标单位是pixel,不含有mm这些距离相关的信息。
假设:
- 图像x方向每个像素对应dx mm的物理距离(在物距为f时),图像y方向每个像素对应dy mm的物理距离(在物距为f时)
- 1/dx 含义: x方向每毫米的像素数
- 1/dy 含义: y方向每毫米的像素数
- [cx,cy]是图像坐标系原点在像素坐标系下的坐标
{ u = c x + x / d x v = c y + y / d y \left\{\begin{matrix}u={c_{x}}+x/{d_{x}}\\v={c_{y}}+y/{d_{y}}\end{matrix}\right. {u=cx+x/dxv=cy+y/dy
等式两边配平
[
u
v
1
]
=
[
1
/
d
x
0
c
x
0
1
/
d
y
c
y
0
0
1
]
[
x
y
1
]
\begin{bmatrix}u\\v\\1\end{bmatrix} =\begin{bmatrix} 1/{d_{x}}&0&{c_{x}}\\ 0&1/{d_{y}}&{c_{y}}\\ 0&0&1 \end{bmatrix} \begin{bmatrix} x\\y\\1 \end{bmatrix}
uv1
=
1/dx0001/dy0cxcy1
xy1
世界坐标系到像素坐标系的转换
[ u v 1 ] = [ 1 / d x 0 c x 0 1 / d y c y 0 0 1 ] [ f / Z c 0 0 0 0 f / Z c 0 0 0 0 1 / Z c 0 ] [ R t 0 1 ] [ X w Y w Z w 1 ] \begin{bmatrix} u\\v\\1 \end{bmatrix} =\begin{bmatrix} 1/{d_{x}}&0&{c_{x}}\\ 0&1/{d_{y}}&{c_{y}}\\ 0&0&1 \end{bmatrix} \begin{bmatrix}{f/Z_{c}}&0&0&0\\0&{f/Z_{c}}&0&0\\0&0&{1/Z_{c}}&0\end{bmatrix} \begin{bmatrix}{R}&{t}\\{0}&{1}\\\end{bmatrix} \begin{bmatrix}{X_{w}}\\{Y_{w}}\\{Z_{w}}\\{1}\\\end{bmatrix} uv1 = 1/dx0001/dy0cxcy1 f/Zc000f/Zc0001/Zc000 [R0t1] XwYwZw1
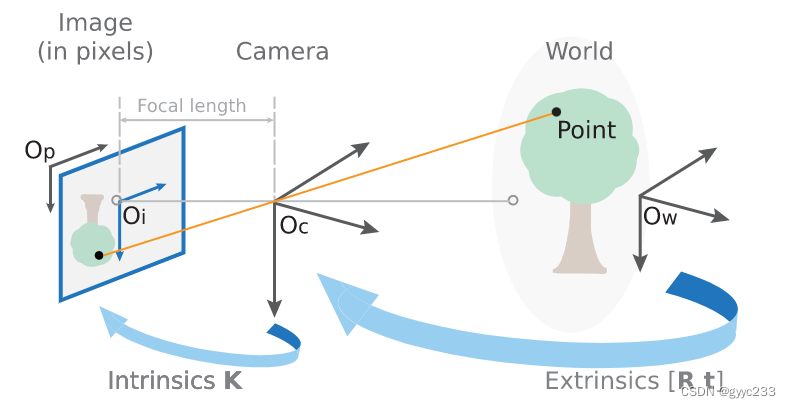
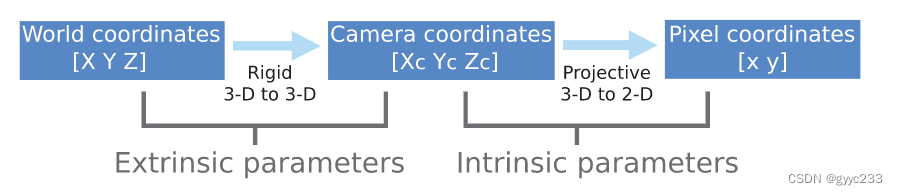
相机内参 intrinsics parameters
将以下矩阵的乘积成为相机内参矩阵intrinsics matrix
- 解释了相机坐标系到像素坐标系的变换关系
- (2)式一般称为内参矩阵
[ 1 / d x 0 c x 0 1 / d y c y 0 0 1 ] [ f / Z c 0 0 0 0 f / Z c 0 0 0 0 1 / Z c 0 ] (1) \begin{bmatrix} 1/{d_{x}}&0&{c_{x}}\\ 0&1/{d_{y}}&{c_{y}}\\ 0&0&1 \end{bmatrix} \begin{bmatrix}{f/Z_{c}}&0&0&0\\0&{f/Z_{c}}&0&0\\0&0&{1/Z_{c}}&0\end{bmatrix} \tag{1} 1/dx0001/dy0cxcy1 f/Zc000f/Zc0001/Zc000 (1)
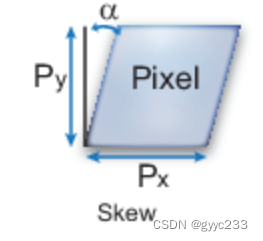
[ f x s c x 0 0 f y c y 0 0 0 1 0 ] (2) \begin{bmatrix} {f_{x}}&s&{c_{x}}&0\\ 0&{f_{y}}&{c_{y}}&0\\ 0&0&1&0 \end{bmatrix} \tag{2} fx00sfy0cxcy1000 (2)
s的定义,普通计算时,一般将s假设为0
相机外参 extrinsics parameters
刚体变换。相机外参矩阵extrinsics matrix 4*4
- 可以用来表示相机在世界坐标系中的位姿
[ R t 0 1 ] \begin{bmatrix}{R}&{t}\\{0}&{1}\\\end{bmatrix} [R0t1]
畸变模型
由透镜引起的畸变称为径向畸变 Radial distortion
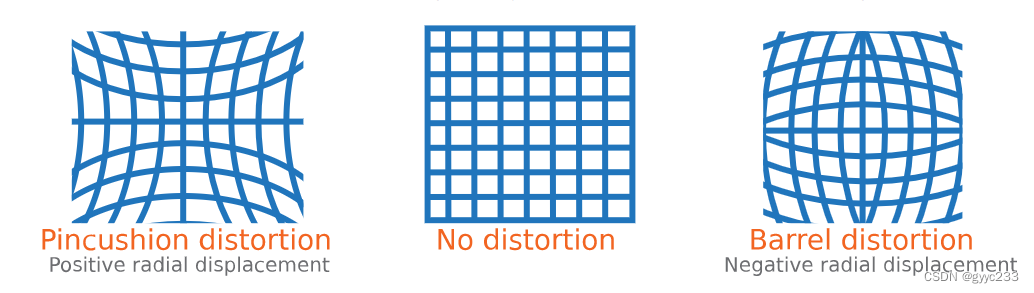
桶形畸变 barrel distortion 越靠近图像中心,图像越被放大
枕型畸变 pincushion distortion 越远离图像中心,图像越被放大
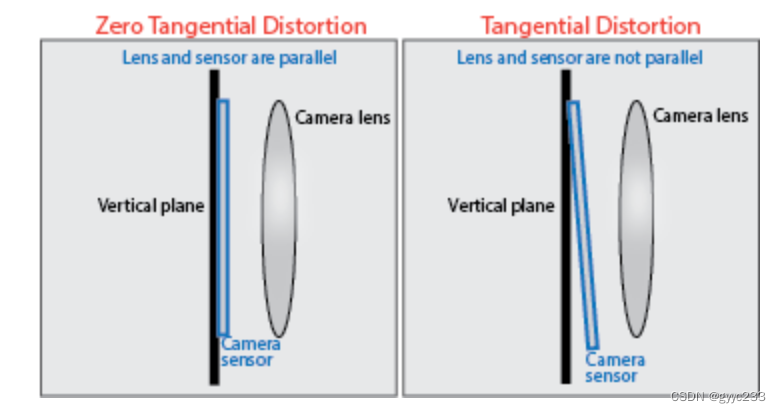
由于透镜与成像平面不平行而导致的畸变成为切向畸变 Tangential Distortion
两种畸变计算(xdistorted, ydistorted)
{
x
d
i
s
t
o
r
t
e
d
=
x
(
1
+
k
1
r
2
+
k
2
r
4
+
k
3
r
6
)
+
[
2
∗
p
1
∗
x
∗
y
+
p
2
(
r
2
+
2
∗
x
2
)
]
y
d
i
s
t
o
r
t
e
d
=
y
(
1
+
k
1
r
2
+
k
2
r
4
+
k
3
r
6
)
+
[
2
∗
p
1
∗
(
r
2
+
2
∗
y
2
)
+
p
2
∗
x
∗
y
]
\left\{\begin{matrix}x_{distorted}=x(1+{k_{1}r^{2}}+{k_{2}r^{4}}+{k_{3}r^{6}})+[2*p_1*x*y+p_2(r^2+2*x^2)]\\y_{distorted}=y(1+{k_{1}r^{2}}+{k_{2}r^{4}}+{k_{3}r^{6}})+[2*p_1*(r^2+2*y^2)+p_2*x*y]\end{matrix}\right.
{xdistorted=x(1+k1r2+k2r4+k3r6)+[2∗p1∗x∗y+p2(r2+2∗x2)]ydistorted=y(1+k1r2+k2r4+k3r6)+[2∗p1∗(r2+2∗y2)+p2∗x∗y]
在没有畸变时,相机坐标系到像素坐标系的转换
{
u
=
f
x
∗
X
c
+
c
x
v
=
f
x
∗
Y
c
+
c
y
\left\{ \begin{matrix} u=f_x*X_c+c_x\\ v=f_x*Y_c+c_y \end{matrix} \right.
{u=fx∗Xc+cxv=fx∗Yc+cy
引入畸变后
{
u
=
f
x
∗
X
d
i
s
t
o
r
t
e
d
+
c
x
v
=
f
x
∗
Y
d
i
s
t
o
r
t
e
d
+
c
y
\left\{ \begin{matrix} u=f_x*X_{distorted}+c_x\\ v=f_x*Y_{distorted}+c_y \end{matrix} \right.
{u=fx∗Xdistorted+cxv=fx∗Ydistorted+cy
径向畸变模型
坐标点沿着长度方向发生了变化,也就是距离原点的长度发生变化
(xdistorted, ydistorted)
r2 = x2+y2 (将x,y 转成极坐标表示[r,/σ])
k1 k2k3 径向畸变系数
{
x
d
i
s
t
o
r
t
e
d
=
x
(
1
+
k
1
r
2
+
k
2
r
4
+
k
3
r
6
)
y
d
i
s
t
o
r
t
e
d
=
y
(
1
+
k
1
r
2
+
k
2
r
4
+
k
3
r
6
)
\left\{ \begin{matrix} x_{distorted}=x(1+{k_{1}r^{2}}+{k_{2}r^{4}}+{k_{3}r^{6}})\\ y_{distorted}=y(1+{k_{1}r^{2}}+{k_{2}r^{4}}+{k_{3}r^{6}}) \end{matrix} \right.
{xdistorted=x(1+k1r2+k2r4+k3r6)ydistorted=y(1+k1r2+k2r4+k3r6)
切向畸变模型
坐标点沿着切线方向发生变化,水平夹角发生变化
(xdistorted, ydistorted)
r2 = x2+y2
{
x
d
i
s
t
o
r
t
e
d
=
x
+
[
2
∗
p
1
∗
x
∗
y
+
p
2
(
r
2
+
2
∗
x
2
)
]
y
d
i
s
t
o
r
t
e
d
=
y
+
[
2
∗
p
1
∗
(
r
2
+
2
∗
y
2
)
+
p
2
∗
x
∗
y
]
\left\{ \begin{matrix} x_{distorted}=x+[2*p_1*x*y+p_2(r^2+2*x^2)]\\ y_{distorted}=y+[2*p_1*(r^2+2*y^2)+p_2*x*y] \end{matrix} \right.
{xdistorted=x+[2∗p1∗x∗y+p2(r2+2∗x2)]ydistorted=y+[2∗p1∗(r2+2∗y2)+p2∗x∗y]
畸变总结
径向畸变 k1 k2 k3
切向畸变 p1 p2
- 实际使用中可以灵活选择畸变模型,如k1 p1 p2 三项
去畸变 undistort
- 将整张图片进行去畸变处理,得到去畸变图像(更常用)
- 从畸变图像某个点出发,按照畸变模型,找到去畸变后的点
圆点与棋盘格
结论: 圆点标定板的标定精度优于棋盘格
圆点标定板:中心拟合精度高,但是存在偏心误差问题。
- 圆的中心的投影,不等于投影出的圆的中心
棋盘格标定板:中心拟合精度低,但是不存在偏心误差问题
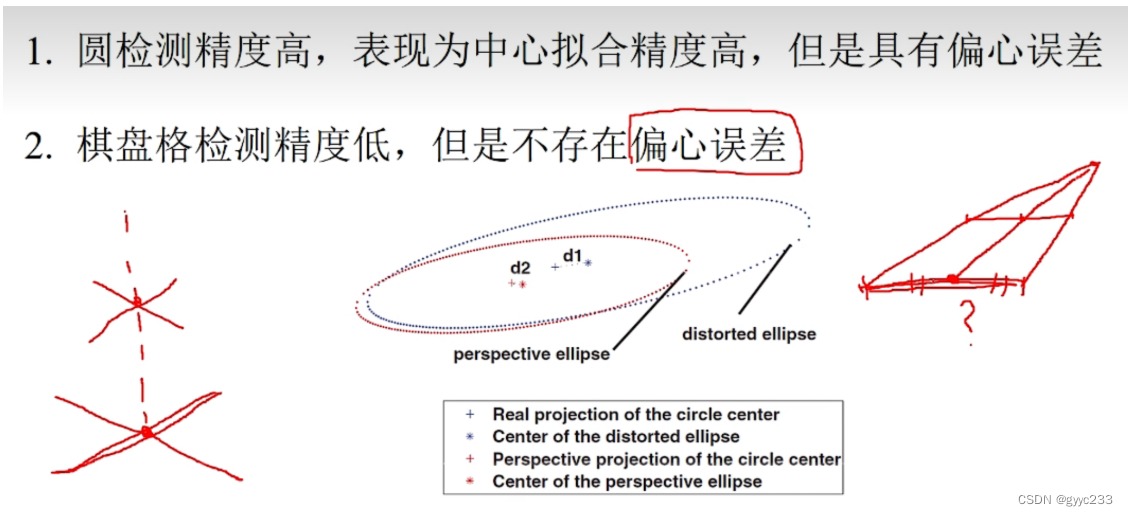
圆环的优化方法:
- 将椭圆通过透视投影,投影成正圆
- 检测正圆圆心
- 再将正圆圆心投影回椭圆平面
OpenCV 相机标定
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-oNYtpzml-1671269465930)(image-20221217161517934.png)]](https://img-blog.csdnimg.cn/1219c73f1aed488d8a2d084714267682.png)
- 让标定板覆盖整个相机平面。永远在中间的话,畸变参数会不准
- 改变角度
- 数量10-20张
cv::calibrationCamera返回 重投影误差 这个参数,一般来说,重投影误差越小,表示这次标定精度越好
标定结果的评价
-
重投影误差 re-projection error
-
影响因素:
-
角点检测精度
-
相机本身噪声,相机固定
-
相机分辨率,其他条件相同,分辨率高的话,re-projection error可能会更大(单位是像素)
-
相机本身的标定算法的最优化
-
其它思路:
- 通过图像上某两个角点反向投影到3D空间,计算距离,与其实际物理距离进行比较
相机内参标定后的应用
PnP问题
solvePnP
已知n点之间的对应关系,怎么求它们之间的关系。
已知3D点,对应2D角点,图像坐标系到像素坐标系的变换,畸变参数,去求某一张图片的外参
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-DgPGceU5-1671269465931)(image-20221217161832680.png)]](https://img-blog.csdnimg.cn/79fc91e699a74e04ae10fc3feacba1f1.png)
其它
- 使用背光板
- 过渡带越长,越影响检测
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-TzGbdLYC-1671269465931)(image-20221217161942921.png)]](https://img-blog.csdnimg.cn/b273c65f03cc411c9f1c303ac9cbd560.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-iJJnKzmg-1671269465931)(image-20221217162003714.png)]](https://img-blog.csdnimg.cn/37534176d89d4c3994be54dfb7cedb31.png)
- 快门时间调低,光圈调小















 3077
3077











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









