







Lagrange插值法
考虑有
n
n
n个不同的点
(
x
1
,
y
1
)
,
(
x
2
,
y
2
)
,
(
x
i
,
y
i
)
…
(
x
n
,
y
n
)
{(x_1,y_1),(x_2,y_2),(x_i,y_i)\dots (x_n,y_n)}
(x1,y1),(x2,y2),(xi,yi)…(xn,yn) ,定义函数
f
i
(
x
)
f_i(x)
fi(x)满足在
l
i
(
x
j
)
l_i(x_j)
li(xj)满足克罗内克符号函数
δ
i
j
\delta_{ij}
δij,
l
i
(
x
j
)
=
δ
i
j
=
{
1
i
=
j
0
i
≠
j
l_i(x_j)=\delta_{ij}=\begin{cases}1\quad\quad\quad i=j\\0\quad\quad\quad i\not=j\end{cases}
li(xj)=δij={1i=j0i=j
此时,若另
L
(
x
)
=
∑
i
=
1
n
y
i
l
i
(
x
)
L(x)=\sum_{i=1}^n y_il_i(x)
L(x)=i=1∑nyili(x)
则对于任意
x
i
x_i
xi有
y
i
=
l
i
(
x
i
)
y_i=l_i(x_i)
yi=li(xi)
即
n
n
n个点必然经过
L
(
x
)
L(x)
L(x),即为所求。
再考虑
l
i
(
x
)
l_i(x)
li(x),其应为一个
n
−
1
n-1
n−1次多项式,则可由因式法写出满足要求的函数:
l
i
(
x
)
=
(
x
−
x
1
)
(
x
−
x
2
)
(
x
−
x
3
)
…
(
x
−
x
i
−
1
)
(
x
−
x
i
+
1
)
…
(
x
i
−
x
n
)
(
x
i
−
x
1
)
(
x
i
−
x
2
)
(
x
i
−
x
3
)
…
(
x
i
−
x
i
−
1
)
(
x
i
−
x
i
+
1
)
…
(
x
i
−
x
n
)
=
∏
j
≠
i
1
≤
j
≤
n
x
−
x
j
x
i
−
x
j
\begin{aligned} l_i(x)&=\frac{(x-x_1)(x-x_2)(x-x_3)\dots(x-x_{i-1})(x-x_{i+1})\dots(x_i-x_n)}{(x_i-x_1)(x_i-x_2)(x_i-x_3)\dots(x_i-x_{i-1})(x_i-x_{i+1})\dots(x_i-x_n)}\\ \\ &=\prod_{j\not=i}^{ 1\le j \le n }\frac{x-x_j}{x_i-x_j} \end{aligned}
li(x)=(xi−x1)(xi−x2)(xi−x3)…(xi−xi−1)(xi−xi+1)…(xi−xn)(x−x1)(x−x2)(x−x3)…(x−xi−1)(x−xi+1)…(xi−xn)=j=i∏1≤j≤nxi−xjx−xj
这里的 l i ( x ) l_i(x) li(x)称为插值基函数。
以下是代码实现
#include<stdio.h>
#include<stdlib.h>
float x[7] = {1.20, 1.24, 1.28, 1.32, 1.36, 1.40};
float y1[7] = {1.09545, 1.11355, 1.13137,1.14891, 1.16619, 1.18322};
float y2[7] = {0.07918, 0.09342, 0.10721, 0.12057, 0.13354, 0.14613};
float xi[6] = {1.22, 1.26, 1.30, 1.34, 1.38};
float Lagrange(float *y,float cx)
{
int n=6;
float temp[10],ans=0;
for(int i=0;i<n;i++)
{
temp[i] = y[i];
for(int j=0;j<n;j++)
if(j!=i)
temp[i] *= (cx - x[j]) / (x[i] - x[j]);
ans += temp[i];
}
return ans;
}
int main()
{
for (int i = 0; i < 5;i++)
printf("当x=%.2f,y1=%.5f,y2=%.5f\n", xi[i], Lagrange(y1,xi[i]),Lagrange(y2,xi[i]));
system("pause");
return 0;
}
我们可以发现假如新加入一个点,就必须得重新计算,这是它的缺点.
Newton插值法
该方法确定了一组新的基函数,确保能加入新的点能够重用之前的计算结果:
ϕ
1
(
x
)
=
1
ϕ
2
(
x
)
=
(
x
−
x
1
)
ϕ
3
(
x
)
=
(
x
−
x
1
)
(
x
−
x
2
)
⋯
=
⋯
ϕ
n
+
1
(
x
)
=
∏
i
=
1
n
(
x
−
x
i
)
\begin{aligned} \phi_{1}(x) &=1 \\ \phi_{2}(x) &=\left(x-x_{1}\right) \\ \phi_{3}(x) &=\left(x-x_{1}\right)\left(x-x_{2}\right) \\ \cdots &=\cdots \\ \phi_{n+1}(x) &=\prod_{i=1}^{n}\left(x-x_{i}\right) \end{aligned}
ϕ1(x)ϕ2(x)ϕ3(x)⋯ϕn+1(x)=1=(x−x1)=(x−x1)(x−x2)=⋯=i=1∏n(x−xi)
可以看到由于
ϕ
n
+
1
(
x
)
=
ϕ
n
(
x
)
(
x
−
x
n
)
\phi_{n+1}(x)=\phi_{n}(x)(x-x_{n})
ϕn+1(x)=ϕn(x)(x−xn),因此可以重用之前的结果。
则最终的多项式为:
N
(
x
)
=
∑
i
=
1
n
+
1
a
i
ϕ
i
(
x
)
N(x)=\sum_{i=1}^{n+1}a_i\phi_i(x)
N(x)=i=1∑n+1aiϕi(x)
现在仅仅需要确定
a
i
a_i
ai的值就可以确定
N
(
x
)
N(x)
N(x)。
我们将每个点依次带入相减可得到一个神奇的规律:
a
1
=
y
1
a
2
=
y
2
−
y
1
x
2
−
x
1
a
3
=
y
3
−
y
2
x
3
−
x
2
−
y
2
−
y
1
x
2
−
x
1
x
3
−
x
1
⋮
\begin{aligned} a_1&=y_1\\ a_2&=\frac{y_2-y_1}{x_2-x_1}\\ a_3&=\frac{\frac{y_3-y_2}{x_3-x_2}-\frac{y_2-y_1}{x_2-x_1}}{x_3-x_1}\\ \vdots \end{aligned}
a1a2a3⋮=y1=x2−x1y2−y1=x3−x1x3−x2y3−y2−x2−x1y2−y1
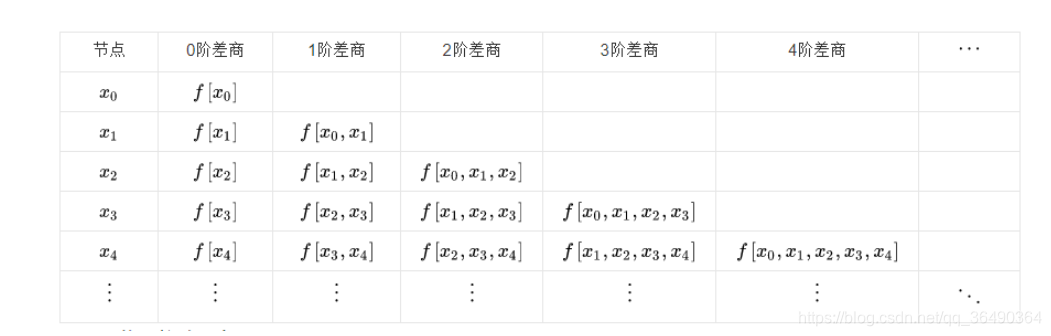
我们把这种叫做差商,0阶均差定义为
f
[
x
i
]
=
f
(
x
i
)
f[x_i]=f(x_i)
f[xi]=f(xi),
n
−
1
n-1
n−1阶差商为:
f
[
x
1
,
x
2
,
x
3
…
x
n
]
=
f
[
x
1
,
x
2
,
x
3
…
x
n
−
1
]
−
f
[
x
2
,
x
3
,
x
4
…
x
n
]
x
n
−
x
1
f[x_1,x_2,x_3\dots x_n]=\frac{f[x_1,x_2,x_3\dots x_{n-1}]-f[x_2,x_3,x_4\dots x_n]}{x_n-x_1}
f[x1,x2,x3…xn]=xn−x1f[x1,x2,x3…xn−1]−f[x2,x3,x4…xn]
下面是差商表,每次迭代也可重用上一步的结果
所以最终为
N
(
x
)
=
f
(
x
1
)
+
f
[
x
1
,
x
2
]
(
x
−
x
1
)
+
f
[
x
1
,
x
2
,
x
3
]
(
x
−
x
1
)
(
x
−
x
2
)
+
f
[
x
1
,
…
,
x
4
]
(
x
−
x
1
)
(
x
−
x
2
)
(
x
−
x
3
)
+
…
\begin{aligned} N(x)=& f\left(x_{1}\right)+\\ & f\left[x_{1}, x_{2}\right]\left(x-x_{1}\right)+\\ & f\left[x_{1}, x_{2}, x_{3}\right]\left(x-x_{1}\right)\left(x-x_{2}\right)+\\ & f\left[x_{1}, \ldots, x_{4}\right]\left(x-x_{1}\right)\left(x-x_{2}\right)\left(x-x_{3}\right)+\\ & \ldots \end{aligned}
N(x)=f(x1)+f[x1,x2](x−x1)+f[x1,x2,x3](x−x1)(x−x2)+f[x1,…,x4](x−x1)(x−x2)(x−x3)+…
以下是代码,可想而知,虽然Newton插值效率提高了,但是也要多出一部分来计算差商
#include<iostream>
#include<stdio.h>
#include<stdlib.h>
using namespace std;
float x[7] = {1.20, 1.24, 1.28, 1.32, 1.36, 1.40};
float y1[7] = {1.09545, 1.11355, 1.13137,1.14891, 1.16619, 1.18322};
float y2[7] = {0.07918, 0.09342, 0.10721, 0.12057, 0.13354, 0.14613};
float xi[6] = {1.22, 1.26, 1.30, 1.34, 1.38};
float diff[10][10];//差商值表
float phi[10];//基函数值
int n=6;
//求差商表,有点像动态规划
void DifferenceQuotient(float *y)
{
for (int i = 0; i < n;i++)
diff[i][0] = y[i];
for (int i = 1; i < n;i++)
{
for (int j = 1 ; j < i+1;j++)
diff[i][j] = (diff[i][j - 1] - diff[i-1][j - 1]) / (x[i] - x[i-j]);
}
}
float Newton(float *y,float cx)
{
phi[0] = 1;
float ans = 0;
for (int i = 1; i < n;i++) //其基函数的值
phi[i] = phi[i-1]*(cx - x[i-1]);
for (int i = 0; i < n;i++)
ans += phi[i] * diff[i][i];//多项式求和为最终结果
return ans;
}
int main(){
DifferenceQuotient(y1);
for (int i = 0; i < 5;i++)
printf("当x=%.2f,y1=%.5f\n", xi[i], Newton(y1,xi[i]));
cout << endl;
DifferenceQuotient(y2);
for (int i = 0; i < 5;i++)
printf("当x=%.2f,y2=%.5f\n", xi[i],Newton(y2,xi[i]));
system("pause");
}
如果要新增节点,可以增量更新差商表
两者关系
其实我们可以发现两个方法都是通过
n
n
n个点确定了一组
n
n
n个方程的方程组:
{
y
1
=
a
0
+
a
1
x
1
+
a
2
x
1
2
+
⋯
+
a
n
x
1
n
y
2
=
a
0
+
a
1
x
2
+
a
2
x
2
2
+
⋯
+
a
n
x
2
n
⋮
y
n
=
a
0
+
a
1
x
n
+
a
2
x
n
2
+
⋯
+
a
n
x
n
n
\begin{cases} y_1&=a_0+a_1x_1+a_2x_1^2+\dots+a_nx_1^n\\ y_2&=a_0+a_1x_2+a_2x_2^2+\dots+a_nx_2^n\\ \vdots\\ y_n&=a_0+a_1x_n+a_2x_n^2+\dots+a_nx_n^n\\ \end{cases}
⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧y1y2⋮yn=a0+a1x1+a2x12+⋯+anx1n=a0+a1x2+a2x22+⋯+anx2n=a0+a1xn+a2xn2+⋯+anxnn
矩阵形式为
Y
=
X
A
Y=XA
Y=XA
[
y
1
y
2
⋮
y
n
]
=
[
1
x
1
x
1
2
…
x
1
n
1
x
2
x
2
2
…
x
2
n
⋮
⋮
⋮
…
⋮
1
x
n
x
n
2
…
x
n
n
]
[
a
0
a
1
⋮
a
n
]
\begin{bmatrix} y_1\\y_2\\ \vdots \\y_n\end{bmatrix}= \begin{bmatrix} 1&x_1&x_1^2&\dots&x_1^n\\1&x_2&x_2^2&\dots&x_2^n\\ \vdots&\vdots&\vdots&\dots&\vdots\\1&x_n&x_n^2&\dots&x_n^n\end{bmatrix} \begin{bmatrix} a_0\\a_1\\ \vdots \\a_n\end{bmatrix}
⎣⎢⎢⎢⎡y1y2⋮yn⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡11⋮1x1x2⋮xnx12x22⋮xn2…………x1nx2n⋮xnn⎦⎥⎥⎥⎤⎣⎢⎢⎢⎡a0a1⋮an⎦⎥⎥⎥⎤
系数矩阵
X
X
X为范德蒙行列式,则
∣
X
∣
≠
0
|X|\not =0
∣X∣=0,因此可以得出其解
A
A
A唯一,故最终确定的多项式唯一,即两者等效.Largrane法较为简单,而Newton法在需要新增节点时可以保持很好的效率。

















 859
859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









