







 本文探讨了如何解决多段图中从起始点v0到终止点的最短路径问题。通过分析问题的最优子结构,确定采用动态规划而非回溯法。算法分为三个步骤:初始化距离向量和前驱节点记录;从节点1开始,逐个检查前驱节点以更新最短路径;最后,输出最短路径。文中提供了C++实现,并附有运行截图。
本文探讨了如何解决多段图中从起始点v0到终止点的最短路径问题。通过分析问题的最优子结构,确定采用动态规划而非回溯法。算法分为三个步骤:初始化距离向量和前驱节点记录;从节点1开始,逐个检查前驱节点以更新最短路径;最后,输出最短路径。文中提供了C++实现,并附有运行截图。
多段图是一个有向的无环图。求解从起始点v0到终止点的最短路径的长度,首先看一下这个问题是否具有最优子结构的性质。对于每一点来说,从v0到它的最短路径有两种可能,分别是从v0直接到该点或者是从最短的前驱节点开始到该节点。从这里可以看出有递归的性质,所以使用回溯的方法也是可以解决的。即从终点开始,依次向前找到最短的路径。由于递归本身所用的时间较长,并且在回溯的过程中存在重复的工作,所以使用动态规划更好。
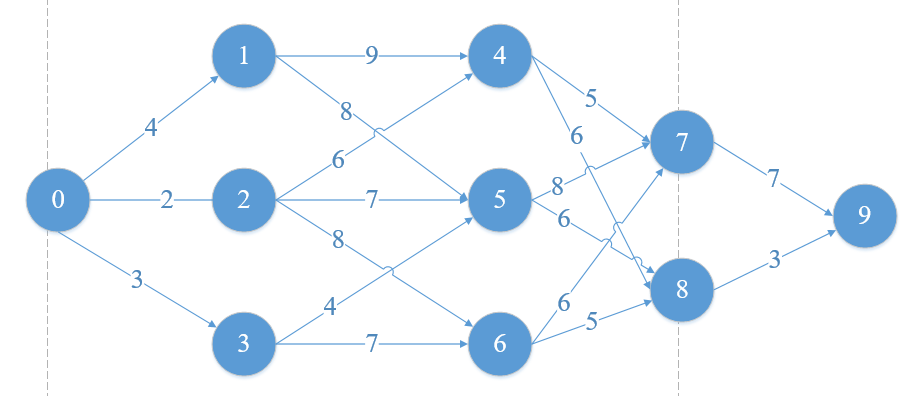
解决的多段图如下所示:
解决的描述为:
1. 初始化待解决的图,初始化从v0 到各个节点的距离向量distance 。distance[0] = 0, 其余初始化为MAX。初始化图的弧arc [][]的权值,如果两个图的定点没有相连,初始化为MAX。设置path[] 用于记录在寻找最短路径时节点i选择的前驱节点path[i]。
2. 从节点1开始,获取该节点的所有的前驱节点。记当前节点为currentnode,当前节点的某个前驱节点为pre[i], (i >= 0 并且 i < pre.size)。设置标记当前节点选择的前驱节点min_i, v0 到当前节点的最短路径的长度 min_length,初始化为distance[currentnode]。对于pre中的每一个节点比较pre[i]+arc[currnode][i] 与min_length ,如果前面的值更小,更新min_i 与min_length。当所有的子节点全部遍历过后,将path[currentnode] = min_i,distance[currentnode] = min_length。
3. 寻找到终结点后, 记终结点为lastnode, 则最短路径的长度为distance[lastnode]。从path[lastnode] 开始 lastnode = path[lastnode] 直到v0 为止,输出最短路径上的节点。
算法实现:
arc 与distance 可以使用矩阵、数组表示,不过为了再次练习使用C++的模板等一些东西,所以实现上不够简洁。代码如下所示:
#include <iostream>
using namespace std;
//用于distance与arc的节点
struct arc_node {
int startnode; //起始节点的编号
int endnode; //终止节点的编号
int weight; //弧的权值
struct arc_node *next;
arc_node() :startnode(-1), endnode(-1), weight(INT_MAX),next(nullptr) {}
struct arc_node& operator =(const struct arc_node &other) {
this->startnode = other.startnod 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









