







 本文记录了学习图形学时关于扫描线填充算法的理解和实践过程。算法通过与图形相交的边进行填充,利用链表结构节省存储空间,并详细描述了初始化活动边表和绘制填充的步骤,包括删除与扫描线平行的边,以及按顺序划线的逻辑。文章还提及使用EasyX库来实现代码。
本文记录了学习图形学时关于扫描线填充算法的理解和实践过程。算法通过与图形相交的边进行填充,利用链表结构节省存储空间,并详细描述了初始化活动边表和绘制填充的步骤,包括删除与扫描线平行的边,以及按顺序划线的逻辑。文章还提及使用EasyX库来实现代码。
在上图形学课的时候,学习了扫描线填充算法。不过在完成实验的时候在真正理解了该算法,在此记录一下,如果有表达上的错误,欢迎指正!
扫描线填充算法通过在与图形相交的第(1,2)、(3,4)... 边之间划线不断不断填充图形。因此,在扫描时就需要确定什么时候与图形的某条边相交、划线的时候x的范围是多少以及划线时是从哪个交点画至另一个交点。
结构体如下所示:
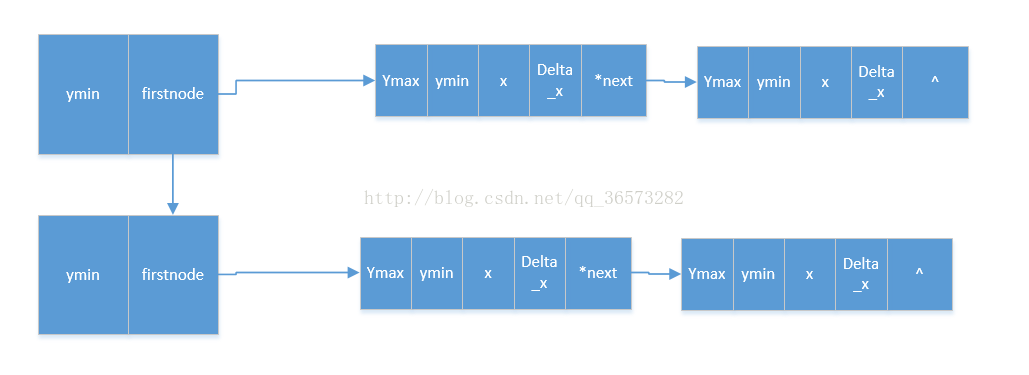
为了节省存储的空间,边表项也使用链表结构,将图形中ymin值相同的边链接在同一个边表项后,这样在扫描的时候方便添加。
具体的流程如下:
一、初始化活动边表
1. 统计并初始化表项
2. 将每条边分别链接在表项后
二、 绘制与填充
1. 取出当前与扫描线相交的边
① 取出ymin 大于当前扫描线的y值的边
② 删除ymax 小于等于当前扫描线的边(①②过程可以排除掉与扫描线平行的边)
2. 将取出的边按照左右顺序排序(根据边的最低点的坐标与直线的斜率判断)
3. 划线并直接在原结构上修改边的x值(因为是在一个函数内,修改保存的值仅限于函数内,并不影响main函数中的值)
具体的代码如下所示,使用的库是EasyX(可以在http://www.easyx.cn/下载):
#include "graphics.h"
#include "stdio.h"
#include "conio.h"
#include <stdlib.h>
#include <math.h>
#include <cmath>
#include <iostream>
using namespace std;
#define MAX_VOL 20
//多边形的边的数据结构
typedef struct Edge
{
int y_max, y_min; //该有向边的y坐标的最大值与最小值
double x, deltax; //该有向边的x的最小值以及x的变化的量(1/斜率)
struct Edge* next; //指向下一条边的指针
}Edge;
//活动边表表项
typedef struct TableItem
{
int curr_y; //该表项的y坐标值 ymin
Edge *firstNode; //该表项的首个节点,如果没有,NULL
struct TableItem *next; //指向下一个活动边表表项的指针
}TableItem;
//活动边表结构体
typedef struct Table
{
TableItem *itemHeader; //活动边表的表项header
int item_count; //活动边表表项的个数
}ET;
class Point
{
private:
int x1, x2, y1, y2;
public:
Point(int x1, int y1, int x2, int y2)
{
this->x1 = x1;
this->x2 = x2;
this->y1 = y1;
this->y2 = y2;
}
//返回两个点之中的ymax
int YMax()
{
return (y1 > y2 ? y1 : y2);
}
//返回ymin
int YMin()
{
return (y1 < y2 ? y1 : y2);
}
//返回ymin 端点的x 值
int x()
{
return (y1 < y2 ? x1 : x2);
}
//返回直线的斜率,按照传入的参数的顺序
double KOfLine()
{
return ((y2 - y1)*1.0 / (x2 - x1));
}
};
class Solution
{
public:
//根据多边形初始化活动表
//参数 T 活动边表
//参数edges 用于初始化的边数组
//参数 edge_num 用于初始化的边的个数
void Init(ET &T, Edge *edges, int edge_num)
{
//初始化活动边表结构体
T.item_count = 0;
T.itemHeader = NULL;
int ymins[20]; //存储ymin ,决定活动边表的个数以 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6364
6364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









