<think>嗯,用户想要一个关于用物理信息神经网络(PINN)求解二维热传导方程的代码示例。我需要先回顾一下二维热传导方程的基本形式。这个方程通常写成 ∂u/∂t = α(∂²u/∂x² + ∂²u/∂y²),其中α是热扩散系数,u是温度场,x和y是空间坐标,t是时间变量。
接下来,我需要考虑PINN的基本结构。PINN通过神经网络近似解u,并将PDE作为损失函数的一部分来训练网络。因此,代码的大致步骤应该包括:定义神经网络结构,设置训练数据(包括初始条件、边界条件和域内的残差点),定义损失函数(包含PDE残差、初始和边界条件),以及训练过程。
首先,用户可能需要一个简单的示例,所以应该选择一个常用的深度学习框架,比如TensorFlow或者PyTorch。这里可能更倾向于PyTorch,因为它在科研中更常用,而且自动微分更方便。
然后,定义神经网络结构。通常使用全连接网络,激活函数如tanh或sigmoid。输入层有3个节点(x, y, t),输出层是u的值。隐藏层的数量和节点数需要合理设置,比如4层,每层20个节点。
接下来是损失函数的构成。需要计算PDE的残差,也就是∂u/∂t - α(∂²u/∂x² + ∂²u/∂y²)。这需要用到自动微分来计算梯度。同时,初始条件和边界条件的损失也要考虑进去。比如,初始时刻t=0时,u的值应该满足某个初始条件u0(x,y),边界上的u值也应该符合给定的边界条件。
生成训练数据时,可能需要使用随机采样点。初始条件的数据点是在t=0时整个空间域采样;边界条件则是在各个边(x=0, x=L, y=0, y=W)的不同时间点采样;而残差点的采样是在整个时空域内随机选择。
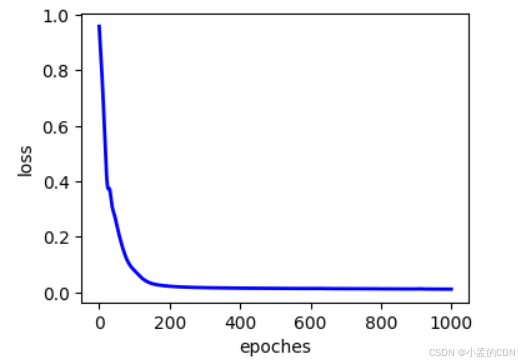
训练过程中,需要将各个损失项加权求和。可能需要调整权重,比如让边界和初始条件的权重更高,以确保这些条件被满足。优化器通常选择Adam,学习率适当设置,比如0.001,迭代次数比如10000次。
另外,需要注意代码的正确性。比如,在计算二阶导数时,要确保正确使用自动微分,可能需要先计算一阶导数,再求导一次。同时,数据点的坐标需要合理归一化,避免输入范围过大导致训练困难。
可能的陷阱包括:网络结构不够深导致无法逼近解,学习率不合适导致收敛慢,损失项权重不平衡导致某些条件不满足。因此,在代码示例中需要给出一些调参的建议,比如调整网络层数、节点数,或者调整权重系数。
最后,示例代码可能需要一个具体的问题设定,比如设定α的值,定义初始条件和边界条件。例如,假设α=0.1,初始条件u0(x,y)=sin(πx)sin(πy),边界条件u=0。然后通过PINN求解这个特定问题。
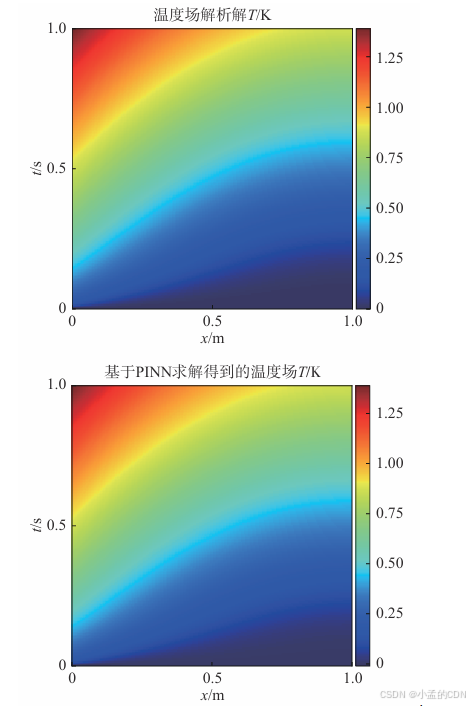
用户可能还需要知道如何验证结果,比如与解析解比较,或者可视化温度场的分布。这部分可以在代码中添加,比如使用matplotlib绘制某个时刻的u分布。
总结下来,代码示例应该包括以下几个部分:
1. 导入必要的库(PyTorch, numpy, matplotlib等)。
2. 定义神经网络结构。
3. 生成训练数据(初始、边界、残差点)。
4. 定义损失函数,包括各个部分。
5. 训练循环。
6. 结果验证和可视化。
需要确保代码中的LaTeX公式正确使用$$和$符号,比如在注释或说明中正确呈现方程。同时,保持代码简洁,注释清晰,方便用户理解和修改参数进行实验。</think>以下是一个基于PyTorch实现PINN求解二维非稳态热传导方程的代码示例,包含详细的中文注释和关键公式说明:
```python
import torch
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
# 二维热传导方程:∂u/∂t = α(∂²u/∂x² + ∂²u/∂y²)
# 定义参数
alpha = 0.1 # 热扩散系数
L, W = 1.0, 1.0 # 空间域范围
T = 1.0 # 时间范围
# 定义神经网络结构
class PINN(nn.Module):
def __init__(self):
super(PINN, self).__init__()
self.net = nn.Sequential(
nn.Linear(3, 20), # 输入(x,y,t)
nn.Tanh(),
nn.Linear(20, 20),
nn.Tanh(),
nn.Linear(20, 20),
nn.Tanh(),
nn.Linear(20, 1) # 输出u
)
def forward(self, x, y, t):
inputs = torch.cat([x, y, t], dim=1)
return self.net(inputs)
# 初始化模型和优化器
model = PINN()
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
# 生成训练数据
def generate_data(num_samples=100):
# 初始条件(t=0)
x_ic = torch.rand(num_samples, 1) * L
y_ic = torch.rand(num_samples, 1) * W
t_ic = torch.zeros(num_samples, 1)
u_ic = torch.sin(np.pi * x_ic) * torch.sin(np.pi * y_ic) # 示例初始条件
# 边界条件(假设Dirichlet边界u=0)
x_bc = torch.cat([torch.zeros(num_samples//4,1), torch.ones(num_samples//4,1),
torch.rand(num_samples//4,1)*L, torch.rand(num_samples//4,1)*L], 0)
y_bc = torch.cat([torch.rand(num_samples//4,1)*W, torch.rand(num_samples//4,1)*W,
torch.zeros(num_samples//4,1), torch.ones(num_samples//4,1)], 0)
t_bc = torch.rand(num_samples, 1) * T
u_bc = torch.zeros(num_samples, 1)
# 残差采样点
x_res = torch.rand(num_samples, 1) * L
y_res = torch.rand(num_samples, 1) * W
t_res = torch.rand(num_samples, 1) * T
return (x_ic, y_ic, t_ic, u_ic), (x_bc, y_bc, t_bc, u_bc), (x_res, y_res, t_res)
# 定义损失函数
def compute_loss(model, ic_data, bc_data, res_data):
# 初始条件损失
x_ic, y_ic, t_ic, u_ic = ic_data
u_pred_ic = model(x_ic, y_ic, t_ic)
loss_ic = torch.mean((u_pred_ic - u_ic)**2)
# 边界条件损失
x_bc, y_bc, t_bc, u_bc = bc_data
u_pred_bc = model(x_bc, y_bc, t_bc)
loss_bc = torch.mean((u_pred_bc - u_bc)**2)
# PDE残差损失
x_res, y_res, t_res = res_data
x_res.requires_grad_(True)
y_res.requires_grad_(True)
t_res.requires_grad_(True)
u = model(x_res, y_res, t_res)
# 计算梯度
grad_u = torch.autograd.grad(u, [x_res, y_res, t_res],
grad_outputs=torch.ones_like(u),
create_graph=True)[0]
u_t = grad_u[:, 2:3] # ∂u/∂t
# 计算二阶导数
u_x = grad_u[:, 0:1]
u_y = grad_u[:, 1:2]
u_xx = torch.autograd.grad(u_x, x_res, torch.ones_like(u_x),
create_graph=True)[0][:, 0:1]
u_yy = torch.autograd.grad(u_y, y_res, torch.ones_like(u_y),
create_graph=True)[0][:, 0:1]
# PDE残差
residual = u_t - alpha*(u_xx + u_yy)
loss_res = torch.mean(residual**2)
# 总损失
total_loss = loss_ic + loss_bc + loss_res
return total_loss
# 训练循环
ic_data, bc_data, res_data = generate_data(1000)
for epoch in range(10000):
optimizer.zero_grad()
loss = compute_loss(model, ic_data, bc_data, res_data)
loss.backward()
optimizer.step()
if epoch % 1000 == 0:
print(f"Epoch {epoch}, Loss: {loss.item():.4e}")
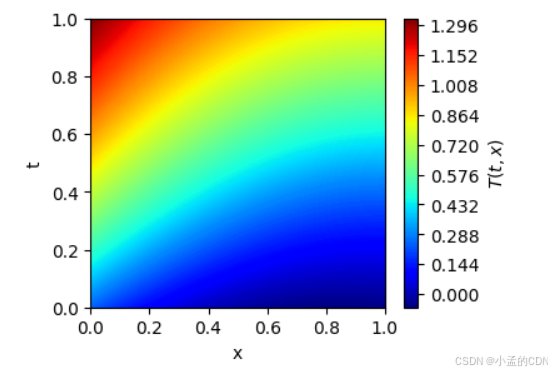
# 结果可视化(示例)
def plot_solution(model, t=0.5):
x = np.linspace(0, L, 100)
y = np.linspace(0, W, 100)
X, Y = np.meshgrid(x, y)
T = np.full_like(X, t)
with torch.no_grad():
u_pred = model(torch.tensor(X.reshape(-1,1), dtype=torch.float32),
torch.tensor(Y.reshape(-1,1), dtype=torch.float32),
torch.tensor(T.reshape(-1,1), dtype=torch.float32))
plt.contourf(X, Y, u_pred.numpy().reshape(100,100))
plt.colorbar()
plt.title(f"Temperature Distribution at t={t}")
plt.show()
plot_solution(model, t=0.5)
```
**关键数学公式说明:**
1. **控制方程**(PDE残差项):
$$ \frac{\partial u}{\partial t} = \alpha\left( \frac{\partial^2 u}{\partial x^2} + \frac{\partial^2 u}{\partial y^2} \right) $$
对应代码中残差计算:
```python
residual = u_t - alpha*(u_xx + u_yy)
```
2. **初始条件**(示例):
$$ u(x,y,0) = \sin(\pi x)\sin(\pi y) $$
对应代码中的`u_ic`计算
**代码特点说明:**
1. 使用全连接神经网络构建PINN,输入为$(x,y,t)$,输出为温度$u$
2. 通过自动微分计算偏导数(`torch.autograd.grad`)
3. 损失函数包含三部分:
- 初始条件损失(均方误差)
- 边界条件损失(均方误差)
- PDE残差损失(均方误差)
4. 可视化函数展示特定时刻的温度分布
**改进建议:**
1. 增加自适应权重平衡不同损失项
2. 使用更复杂的网络结构(如残差连接)
3. 引入硬约束条件处理边界
4. 采用自适应采样策略
建议先运行此基础版本,再逐步添加高级功能。可通过调整网络深度/宽度、学习率、采样点数量等参数观察收敛效果。



























 1123
1123

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











