







这是移植好的文件,可以放在Hardware文件里面导入(记得添加头文件路径)。里面大概可以分为四个部分
eMPL里面是修改好的官方dmp文档,EXTI是管理外部中断的代码,IIC是模拟IIC通信部分的代码,最后两个文件是最重要的,是提供给用户调用的接口模块,main文件里只需要包含mpu_useapi.h文件即可里面存放了所有需要的接口函数和全局变量。
首先看mpu_useapi.h头文件的内容

为了简单易用可移植,我把所有不必要的函数都去掉了,包括中断函数也隐藏在其他文件里,主函数只需要调用一个初始化函数,然后就可以从pitch,roll,yaw三个全局变量里面调用姿态角了,至于姿态角数据是否跳变有效,并没有做处理(可能官方库做了处理,大部分情况都没问题)。
这是软件部分的移植,然后硬件方面的接线默认是SDA->A7,SCL->A6,INT->A5,如果想要更改IIC的引脚,可以找到mpu_iic.h这个文件,里面有七个宏

只要根据需要做对应的修改即可。
而如果想要更改外部中断INT的引脚,找到mpu_exti.c这个文件。
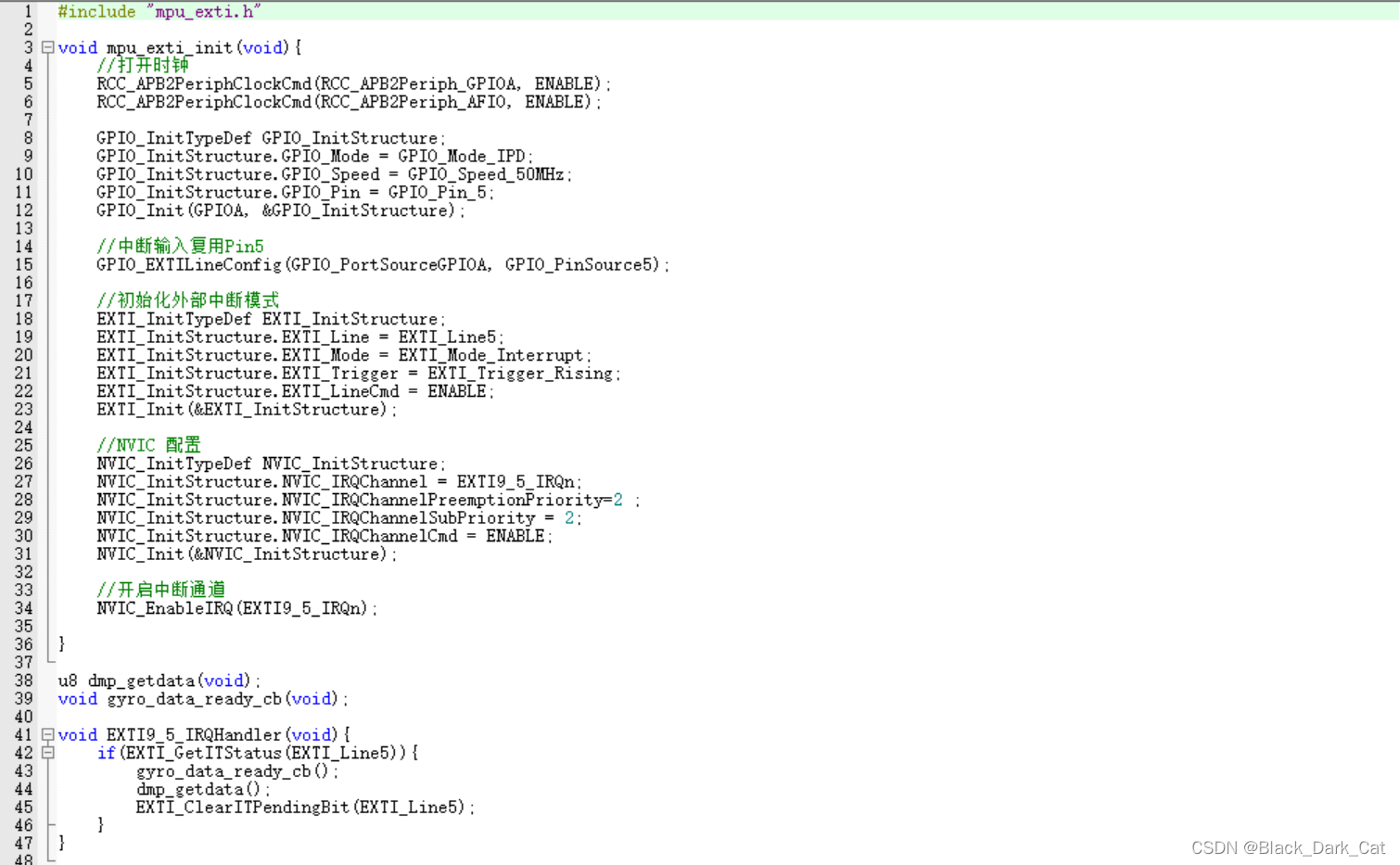
里面存放的中断函数和中断初始化函数都需要做相应的修改,相信学长你没问题的。
至于修改后的官方的库文件,就尽量不要动了。
做了四天了,终于把bug修完了。。。















 644
644











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









