









目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
本次分享的课题是
🎯基于机器视觉的颜色目标识别算法研究与实现
背景和意义
随着科技的进步和机器视觉技术的快速发展,颜色目标识别在工业自动化、智能交通、安防监控等领域得到了广泛应用。颜色作为人类视觉感知的重要特征,能够直观地反映物体的状态和特性,因此,基于颜色的目标识别技术在实际应用中显得尤为重要。在工业生产过程中,颜色目标识别能够实现对产品质量的自动检测和分类,提升生产效率,降低人工成本。例如,在食品行业,通过颜色识别技术可以快速判断食品的新鲜度和成熟度。在智能交通领域,颜色目标识别可以用于交通标志检测和红绿灯识别,辅助自动驾驶系统,提高道路安全。在安防监控中,颜色目标识别技术可以实现对可疑物体的快速定位与追踪,为公共安全提供保障。
传统的颜色识别方法常常受到光照变化、背景干扰和物体形状等因素的影响,导致识别精度降低。因此,研究基于机器视觉的颜色目标识别算法,优化颜色空间转换和图像处理方法,提升识别的鲁棒性和准确性,具有重要的理论意义和实用价值。通过引入先进的图像处理技术和机器学习算法,能够更好地实现对复杂环境中颜色目标的高效识别,为各行业的智能化发展提供强有力的技术支持。
技术思路
彩色空间是描述和表示颜色的一种模型,它通过不同的参数组合来表征颜色的特性。RGB(红绿蓝)三原色是最常见的颜色空间,它通过调整这三种颜色的强度来生成多种颜色。RGB的每种颜色强度范围为0到255,这使得可以组合出多达16777216种不同的颜色,非常适合用于显示设备如相机和电视机等,这些设备利用RGB空间的模型进行色彩再现。然而,RGB主要面向硬件模型,且不太适合于某些应用,如图像处理和计算机视觉。
CMY(青色、品红色和黄色)是另一种面向硬件设备的颜色模型,主要应用于彩色打印机和复印机等。CMY颜色空间是RGB的二次色,通过颜料的混合来定义颜色,这种方式在机器视觉中涉及较少,因此这里不做深入探讨。

与RGB和CMY不同,HSV(色相、饱和度、亮度)颜色空间是一种更接近人类直观感知的颜色模型,由A. R. Smith于1978年提出。HSV模型的色调(H)表示颜色的类型,以0°到360°的角度范围进行度量,从红色开始逆时针计算,绿色为120°,蓝色为240°,而其补色则分别为黄色、青色和品红。饱和度(S)表示颜色的纯度,取值范围为0到255,值越大颜色越纯;亮度(V)表示颜色的明亮程度,其值范围从0(黑色)到255(白色)。HSV模型因其直观性和易于理解的特性,广泛应用于图像处理和计算机视觉领域,特别是在颜色目标识别和分割等任务中。

利用彩色空间进行颜色识别的过程可以分为几个关键步骤。首先,输入的是一幅彩色图像,该图像通常以RGB格式表示。接下来,通过将该图像转换到所需的颜色空间(如HSV、CMY或其他色彩空间),可以采用不同的方法进行转换,例如按R分量法、最大值法或插值法等,这些方法可以有效提取出颜色信息。完成颜色空间转换后,便可以在该空间内进行各种图像处理操作,比如颜色阈值分割、目标检测和特征提取等,以实现对特定颜色目标的识别与定位。通过这种方式,能够更准确地分析和处理图像中的颜色信息,提升颜色识别的效果和准确性。

通过对颜色信息的提取与分析,实现对特定颜色目标的识别与定位。整个研究过程可以分为几个关键步骤:数据采集、图像预处理、颜色空间转换、目标检测与识别、以及结果分析与验证。以下是各个步骤的详细描述与代码示例。
数据采集是颜色目标识别的第一步。为确保识别的准确性,通常需要在不同的环境条件下(如光照、背景和物体形状)采集目标图像。可以使用高分辨率的摄像头来捕获图像,以便获取更多细节,并确保数据集的多样性。对于颜色目标识别,图像的清晰度和色彩还原度尤为重要。可以使用OpenCV的VideoCapture类来实时捕获视频流,或从存储设备中读取图像。
import cv2
# 初始化摄像头
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
if not ret:
break
cv2.imshow('Video Feed', frame) # 显示实时视频流
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
数据采集完成后,图像预处理是提高识别效果的重要步骤。预处理通常包括图像缩放、去噪、颜色空间转换等操作。将图像转换为适合后续处理的格式,常用的颜色空间有HSV(色相、饱和度、明度)和LAB色彩空间,这些空间能更好地表达颜色信息。通过去噪算法(如高斯模糊)可以减少背景噪声,增强目标的清晰度,为后续的目标识别奠定基础。
# 图像预处理示例
blurred = cv2.GaussianBlur(frame, (5, 5), 0) # 高斯模糊去噪
hsv = cv2.cvtColor(blurred, cv2.COLOR_BGR2HSV) # 转换为HSV色彩空间
颜色空间转换是颜色目标识别的核心步骤。通过定义目标颜色的HSV范围,可以利用cv2.inRange()函数创建一个掩膜,该掩膜将目标颜色提取出来。这步骤的关键在于确定合适的颜色范围,通常可以通过实验和视觉观察来调整。生成的掩膜将只保留指定颜色的像素,方便后续的目标检测。
# 颜色空间转换和掩膜创建示例
lower_color = (30, 100, 100) # 设置目标颜色的HSV范围(例如:绿色)
upper_color = (90, 255, 255)
mask = cv2.inRange(hsv, lower_color, upper_color) # 创建掩膜
在获得掩膜之后,目标检测与识别是实现颜色目标识别的关键步骤。可以使用轮廓检测方法,通过cv2.findContours()函数提取掩膜中的轮廓信息,并计算每个轮廓的属性(如面积、中心点等)以进行后续的识别。此外,通过设定面积阈值,可以过滤掉小的噪声目标,确保只识别出符合条件的目标。
# 目标检测与识别示例
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for contour in contours:
if cv2.contourArea(contour) > 500: # 过滤小轮廓
(x, y, w, h) = cv2.boundingRect(contour)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2) # 绘制矩形框
完成目标检测与识别后,结果分析与验证是评估算法性能的重要环节。可以通过在图像上叠加识别结果来直观展示识别效果,同时记录识别的准确率、召回率等指标,以评估算法的性能。通过与人工标注结果的比较,可以进一步优化颜色范围和算法参数,提高识别的准确性和鲁棒性。
# 结果可视化示例
cv2.putText(frame, 'Detected Color Object', (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow('Color Target Recognition', frame)
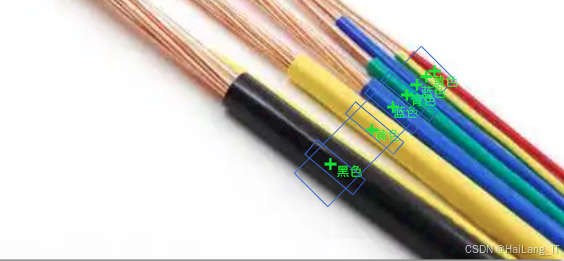
效果图样例
我是海浪学长,创作不易,欢迎点赞、关注、收藏、留言。
毕设帮助,疑难解答,欢迎打扰!

















 3840
3840

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









