







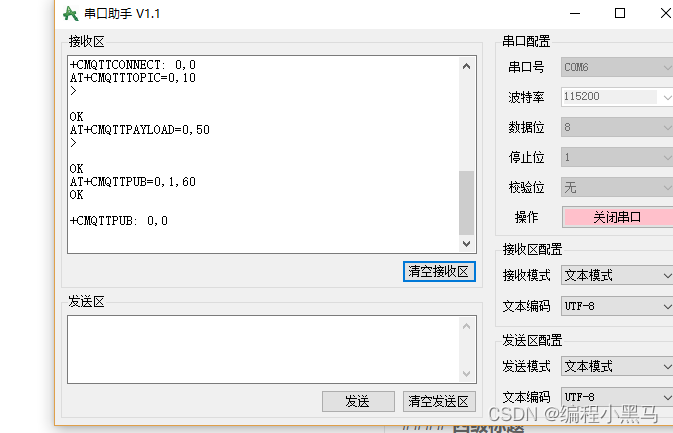
1,测试串口发送AT指令是否正常
TLLusb转接口的 RX 接 4g模块的TX,
TLLusb转接口的 TX 接 单片机 PA10(RX) 引脚
4g模块 RX 接 stm32单片机 PA2(TX)引脚
STM32 模块接收端暂时不接
串口波特率调到115200
模块儿核心代码如下
usart.c
/**
************************************************************
************************************************************
************************************************************
* 文件名: usart.c
*
* 作者: 张继瑞
*
* 日期: 2016-11-23
*
* 版本: V1.0
*
* 说明: 单片机串口外设初始化,格式化打印
*
* 修改记录:
************************************************************
************************************************************
************************************************************
**/
#include "stm32f10x.h" // Device header
//硬件驱动
#include "usart.h"
#include "delay.h"
#include "OLED.h"
//C库
#include <stdarg.h>
#include <string.h>
#include <stdio.h>
u8 Res;
u8 Res2;
/*
************************************************************
* 函数名称: Usart2_Init
*
* 函数功能: 串口2初始化
*
* 入口参数: baud:设定的波特率
*
* 返回参数: 无
*
* 说明: TX-PA2 RX-PA3
************************************************************
*/
void Usart2_Init(unsigned int baud)
{
GPIO_InitTypeDef gpioInitStruct;
USART_InitTypeDef usartInitStruct;
NVIC_InitTypeDef nvicInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
//PA2 TXD
gpioInitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
gpioInitStruct.GPIO_Pin = GPIO_Pin_2;
gpioInitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpioInitStruct);
//PA3 RXD
gpioInitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpioInitStruct.GPIO_Pin = GPIO_Pin_3;
gpioInitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &gpioInitStruct);
usartInitStruct.USART_BaudRate = baud;
usartInitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控
usartInitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //接收和发送
usartInitStruct.USART_Parity = USART_Parity_No; //无校验
usartInitStruct.USART_StopBits = USART_StopBits_1; //1位停止位
usartInitStruct.USART_WordLength = USART_WordLength_8b; //8位数据位
USART_Init(USART2, &usartInitStruct);
USART_Cmd(USART2, ENABLE); //使能串口
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); //使能接收中断
nvicInitStruct.NVIC_IRQChannel = USART2_IRQn;
nvicInitStruct.NVIC_IRQChannelCmd = ENABLE;
nvicInitStruct.NVIC_IRQChannelPreemptionPriority = 0; 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1442
1442











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









