







为什么要用ElasticSearch?
完全把数据放在内存中是不可靠的,实际上也不太现实,当我们的数据达到PB级别时,按照每个节点96G内存计算,在内存完全装满的数据情况下,我们需要的机器是:1PB=1024T=1048576G
节点数=1048576/96=10922个
实际上,考虑到数据备份,节点数往往在2.5万台左右。成本巨大决定了其不现实!
从前面讨论我们了解到,把数据放在内存也好,不放在内存也好,都不能完完全全解决问题。
全部放在内存速度问题是解决了,但成本问题上来了。
为解决以上问题,从源头着手分析,通常会从以下方式来寻找方法:
1、存储数据时按有序存储;
2、将数据和索引分离;
3、压缩数据;
ElasticSearch的定义
ElasticSearch的目标就是实现搜索。在数据量少的时候,我们可以通过索引去搜索关系型数据库中的数据,但是如果数据量很大,搜索的效率就会很低,这个时候我们就需要一种分布式的搜索引擎。Elasticsearch是一个基于Lucene的搜索服务器。它提供了一个分布式多用户能力的全文搜索引擎,基于RestFul web接口。
ES主要用于全文检索、结构化搜索以及分析。ES的应用十分广泛,比如维基百科、Github等都使用ES实现搜索。
Lucene与ES关系?
- Lucene只是一个库。想要使用它,你必须使用Java来作为开发语言并将其直接集成到你的应用中,更糟糕的是,Lucene非常复杂,你需要深入了解检索的相关知识来理解它是如何工作的。
- Elasticsearch也使用Java开发并使用Lucene作为其核心来实现所有索引和搜索的功能,但是它的目的是通过简单的RESTful API来隐藏Lucene的复杂性,从而让全文搜索变得简单。
核心概念
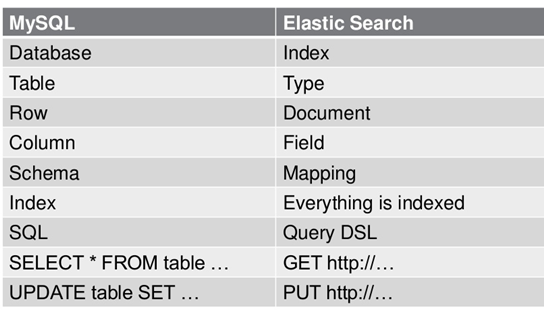
- 关系型数据库中的数据库(DataBase),等价于ES中的索引(Index)。
- 一个数据库下面有N张表(Table),等价于1个索引Index下面有N多类型(Type)。(在ES7.x版本中,types将慢慢被遗弃,在8.x版本中,types将会彻底弃用。)
- 一个数据库表(Table)下的数据由多行(ROW)多列(column,属性)组成,等价于1个Type由多个文档(Document)和多Field组成。
- 在一个关系型数据库里面,schema定义了表、每个表的字段,还有表和字段之间的关系。 与之对应的,在ES中:Mapping定义索引下的Type的字段处理规则,即索引如何建立、索引类型、是否保存原始索引JSON文档、是否压缩原始JSON文档、是否需要分词处理、如何进行分词处理等。
- 在数据库中的增insert、删delete、改update、查search操作等价于ES中的增PUT/POST、删Delete、改_update、查GET。
ES既然是用来搜索的,那么它必然也需要存储数据。在Mysql等关系型数据库中,数据的存储遵循下面的逻辑:
一个数据库(database)中有多个表(tables),每个表有多行数据(rows),每一行数据由多个字段(columns)组成。
ES中的存储是这样的:
一个索引(indeces)相当于一个数据库(database),每个索引中有多个类型types(相当于表结构),每个索引中有多个documents(相当于行),每个documents由多个fields组成(相当于字段)。
ES不是高QPS的应用,写操作非常消耗CPU资源,因此写操作属于比较长的操作,聚合由于涉及数据量比较大,延迟也经常到秒级,查询一般也不密集。
索引结构
ES是面向文档的。各种文本内容以文档的形式存储到ES中。在存储结构上,由_index、_type和_id唯一标识一个文档。_index指向一个或多个物理分片的逻辑命名空间,_type类型用于区分同一个集合中的不同细分,在不同的细分中,数据的整体模式是相同或相似的,不适合完全不同类型的数据。多个_type可以在相同的索引中存在,只要它们的字段不冲突即可(对于整个索引,映射在本质上被“扁平化”成一个单一的、全局的模式)。_id文档标记符由系统自动生成或使用者提供。在ES 6.x版本中,一个索引只允许存在一个_type,未来的7.x版本将慢慢删除_type的概念。
分片(shard)
除了将数据分片以提高水平扩展能力,分布式存储中还会把数据复制成多个副本,放置到不同的机器中,这样一来可以增加系统可用性,同时数据副本还可以使读操作并发执行,分担集群压力。但是多数据副本也带来了一致性的问题:部分副本写成功,部分副本写失败。
为了应对并发更新问题,ES将数据副本分为主从两部分,即主分片(primary shard)和副分片(replica shard)。主数据作为权威数据,写过程中先写主分片,成功后再写副分片,恢复阶段以主分片为准。
分片(shard)是底层的基本读写单元,分片的目的是分割巨大索引,让读写可以并行操作,由多台机器共同完成。读写请求最终落到某个分片上,分片可以独立执行读写工作。ES利用分片将数据分发到集群内各处。分片是数据的容器,文档保存在分片内,不会跨分片存储。分片又被分配到集群内的各个节点里。当集群规模扩大或缩小时,ES 会自动在各节点中迁移分片,使数据仍然均匀分布在集群里。
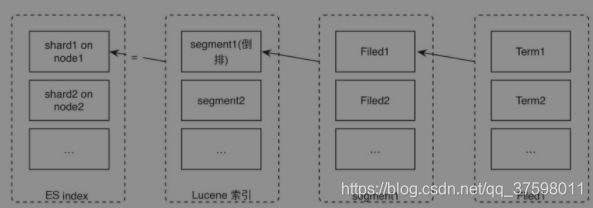
一个ES索引包含很多分片,一个分片是一个Lucene的索引,它本身就是一个完整的搜索引擎,可以独立执行建立索引和搜索任务。Lucene索引又由很多分段组成,每个分段都是一个倒排索引。ES每次“refresh”都会生成一个新的分段,其中包含若干文档的数据。在每个分段内部,文档的不同字段被单独建立索引。每个字段的值由若干词(Term)组成,Term是原文本内容经过分词器处理和语言处理后的最终结果(例如,去除标点符号和转换为词根)。
在实际应用中,我们不应该向单个索引持续写数据,直到它的分片巨大无比。巨大的索引会在数据老化后难以删除,以_id 为单位删除文档不会立刻释放空间,删除的 doc 只在 Lucene分段合并时才会真正从磁盘中删除。即使手工触发分段合并,仍然会引起较高的 I/O 压力,并且可能因为分段巨大导致在合并过程中磁盘空间不足(分段大小大于磁盘可用空间的一半)。因此,我们建议周期性地创建新索引。例如,每天创建一个。假如有一个索引website,可以将它命名为website_20180319。然后创建一个名为website的索引别名来关联这些索引。这样,对于业务方来说,读取时使用的名称不变,当需要删除数据的时候,可以直接删除整个索引。
动态更新索引
为文档建立索引,使其每个字段都可以被搜索,通过关键词检索文档内容,会使用倒排索引的数据结构。倒排索引一旦被写入文件后就具有不变性,不变性具有许多好处:对文件的访问不需要加锁,读取索引时可以被文件系统缓存等。
索引如何更新,让新添加的文档可以被搜索到?
答案是使用更多的索引,新增内容并写到一个新的倒排索引中,查询时,每个倒排索引都被轮流查询,查询完再对结果进行合并。
近实时搜索
在写操作中,一般会先在内存中缓冲一段数据,再将这些数据写入硬盘,每次写入硬盘的这批数据称为一个分段,如同任何写操作一样。一般情况下(direct方式除外),通过操作系统write接口写到磁盘的数据先到达系统缓存(内存),write函数返回成功时,数据未必被刷到磁盘。通过手工调用flush,或者操作系统通过一定策略将系统缓存刷到磁盘。这种策略大幅提升了写入效率。从write函数返回成功开始,无论数据有没有被刷到磁盘,该数据已经对读取可见。
ES正是利用这种特性实现了近实时搜索。每秒产生一个新分段,新段先写入文件系统缓存,但稍后再执行flush刷盘操作,写操作很快会执行完,一旦写成功,就可以像其他文件一样被打开和读取了。
由于系统先缓冲一段数据才写,且新段不会立即刷入磁盘,这两个过程中如果出现某些意外情况(如主机断电),则会存在丢失数据的风险。通用的做法是记录事务日志,每次对ES进行操作时均记录事务日志,当ES启动的时候,重放translog中所有在最后一次提交后发生的变更操作。比如HBase等都有自己的事务日志。
段合并
在ES中,每秒清空一次写缓冲,将这些数据写入文件,这个过程称为refresh,每次refresh会创建一个新的Lucene 段。但是分段数量太多会带来较大的麻烦,每个段都会消耗文件句柄、内存。每个搜索请求都需要轮流检查每个段,查询完再对结果进行合并;所以段越多,搜索也就越慢。因此需要通过一定的策略将这些较小的段合并为大的段,常用的方案是选择大小相似的分段进行合并。在合并过程中,标记为删除的数据不会写入新分段,当合并过程结束,旧的分段数据被删除,标记删除的数据才从磁盘删除。
集群内部原理
从集群节点角色的角度划分,至少存在主节点和数据节点,另外还有协调节点、预处理节点和部落节点。
集群节点角色
- 主节点(Master node)主节点负责集群层面的相关操作,管理集群变更。
- 数据节点(Data node)负责保存数据、执行数据相关操作:CRUD、搜索、聚合等。数据节点对CPU、内存、I/O要求较高。一般情况下(有一些例外,后续章节会给出),数据读写流程只和数据节点交互,不会和主节点打交道(异常情况除外)。
- 预处理节点(Ingest node)这是从5.0版本开始引入的概念。预处理操作允许在索引文档之前,即写入数据之前,通过事先定义好的一系列的processors(处理器)和pipeline(管道),对数据进行某种转换、富化。processors和pipeline拦截bulk和index请求,在应用相关操作后将文档传回给index或bulk API。
- 协调节点(Coordinating node)客户端请求可以发送到集群的任何节点,每个节点都知道任意文档所处的位置,然后转发这些请求,收集数据并返回给客户端,处理客户端请求的节点称为协调节点。协调节点将请求转发给保存数据的数据节点。每个数据节点在本地执行请求,并将结果返回协调节点。协调节点收集完数据后,将每个数据节点的结果合并为单个全局结果。对结果收集和排序的过程可能需要很多CPU和内存资源。
- 部落节点(Tribe node)tribes(部落)功能允许部落节点在多个集群之间充当联合客户端。(它不做主节点,也不做数据节点,仅用于路由请求,本质上是一个智能负载均衡器(从负载均衡器的定义来说,智能和非智能的区别在于是否知道访问的内容存在于哪个节点),从5.0版本开始,这个角色被协调节点(Coordinating only node)取代。)
集群健康状态
从数据完整性的角度划分,集群健康状态分为三种:·
- Green,所有的主分片和副分片都正常运行。
- Yellow,所有的主分片都正常运行,但不是所有的副分片都正常运行。这意味着存在单点故障风险。
- Red,有主分片没能正常运行。
每个索引也有上述三种状态,假设丢失了一个副分片,该分片所属的索引和整个集群变为Yellow状态,其他索引仍为Green。
集群状态
集群状态元数据是全局信息,元数据包括内容路由信息、配置信息等,其中最重要的是内容路由信息,它描述了“哪个分片位于哪个节点”这种信息。
集群状态由主节点负责维护,如果主节点从数据节点接收更新,则将这些更新广播到集群的其他节点,让每个节点上的集群状态保持最新。
集群扩容
当扩容集群、添加节点时,分片会均衡地分配到集群的各个节点,从而对索引和搜索过程进行负载均衡,这些都是系统自动完成的。
分片副本实现了数据冗余,从而防止硬件故障导致的数据丢失。
分片分配过程中除了让节点间均匀存储,还要保证不把主分片和副分片分配到同一节点,避免单个节点故障引起数据丢失。
分布式系统中难免出现故障,当节点异常时,ES会自动处理节点异常。当主节点异常时,集群会重新选举主节点。当某个主分片异常时,会将副分片提升为主分片。














 266
266











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









