







视觉SLAM理论到实践系列
视觉SLAM理论到实践系列(二)——三维物体的刚体运动(1)
视觉SLAM理论到实践系列(二)——三维物体的刚体运动(2)
下面是《视觉SLAM十四讲》学习笔记的系列记录的总链接,本人发表这个系列的文章链接均收录于此
视觉SLAM理论到实践系列文章链接
下面是专栏地址:
视觉SLAM理论到实践专栏
文章目录
前言
高翔博士的《视觉SLAM14讲》学习笔记的系列记录
视觉SLAM理论到实践系列(二)——三维物体的刚体运动(2)
Eigen使用
Eign中对各种形式的表达方式总结如下。请注意每种类型都有单精度和双精度两种数据类型,而且和之前一样,不能由编译器自动转换。下面以双精度为例,你可以把最后的 d 改成 f ,即得到单精度的数据结构。
- 旋转矩阵(3×3):Eigen:Matrix.3d。
- 旋转向量(3×1):Eigen:AngleAxisd。
- 欧拉角(3×1):Eigen:Vector3d。
- 四元数(4×1):Eigen:Quaterniond
- 欧氏变换矩阵(4×4):Eigen:Isometry3d。
- 仿射变换(4×4):Eigen:Affine3d。
- 射影变换(4×4):Eigen:Projective.3d。
参考代码中对应的CMakeLists即可编译此程序。在这个程序中,演示了如何使用Eigen中的旋转矩阵、旋转向量、欧拉角和四元数。我们用这几种旋转方式旋转一个向量 v v v ,发现结果是一样的。
同时,也演示了如何在程序中转换这几种表达方式。想进一步了解Eigen的几何模块的读者可以参考(http://eigen.tuxfamily.org/dox/group__TutorialGeometry.html)
Eigen官网:http://eigen.tuxfamily.org
这里使用高翔的slambook的源码,这里的源码采用嵌套式的CMakeLists.txt结构,即最外面的CMakeLists.txt包面里面的子文件夹
建立一个build目录,然后对源码进行编译
编译完成后产生的可执行二进制文件都在build目录下

coordinateTransform 执行结果

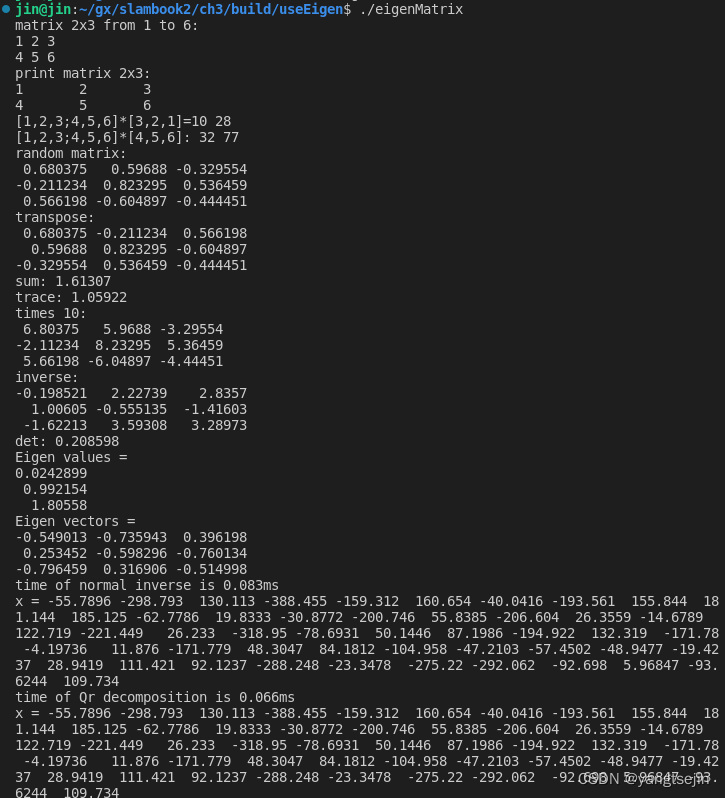
eigenMatrix执行结果
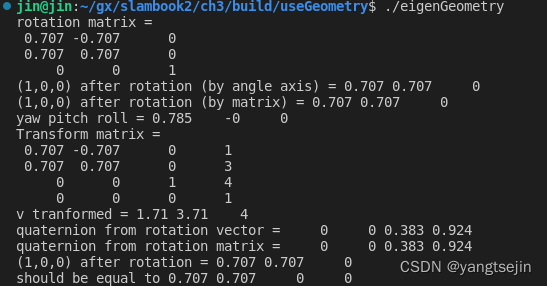
eigenGeometry执行结果
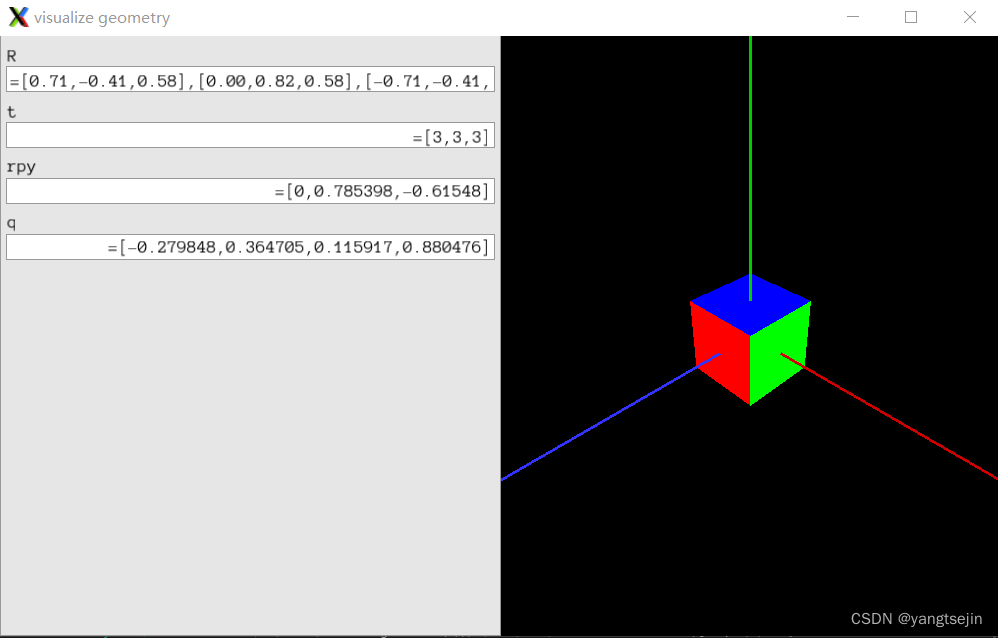
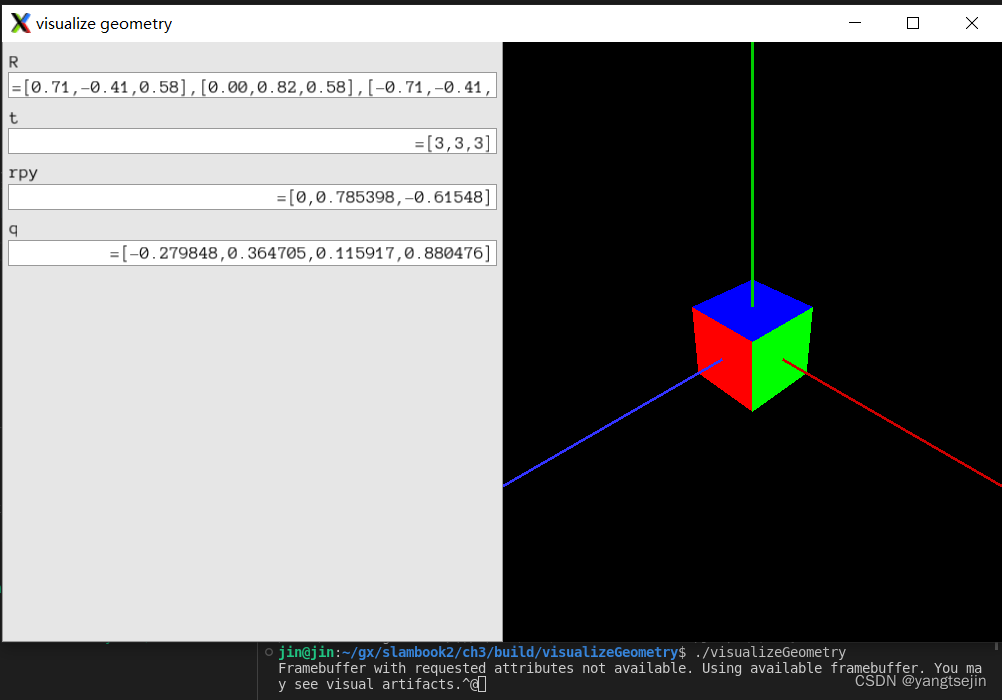
visualizeGeometry执行结果
出现的错误
错误1
在编译slambook的ch3的源码时,会报如下错误
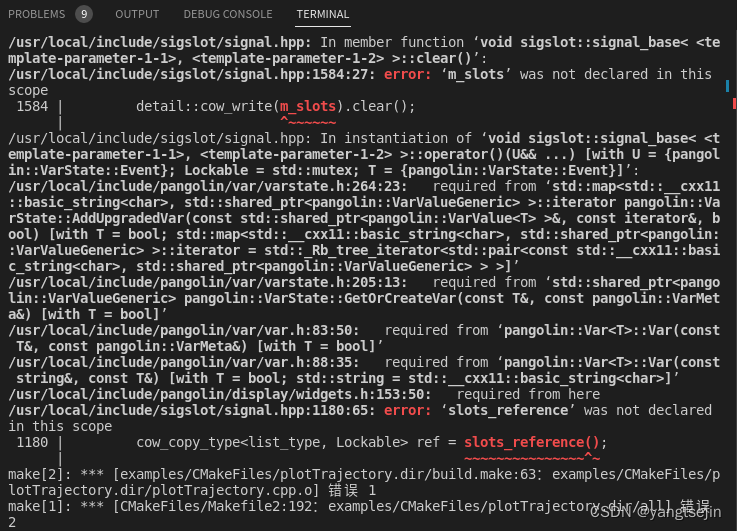
其实是 C++ 11 不支持编译,把 CMakeLists.txt中的C++版本换到 C++14 就可以了
sed -i 's/++11/++14/g' CMakeLists.txt
但这里源码中的CMakeLists.txt没有指定编译的C++版本,所以在编译时指定c++的版本
cmake CMakeLists.txt文件路径 -DCMAKE_CXX_STANDARD=14
即
cd build
cmake .. -DCMAKE_CXX_STANDARD=14
即可编译成功

错误2
参考:
error while loading shared libraries的解决方案
SLAM第三讲实践报错:./visualizeGeometry: error while loading shared libraries:报错
visualizeGeometry执行时报错
找不到动态库libpango_windowing.so

解决方法:
更改配置文件
- 一般安装目录在:
/usr/local/lib
配置文件在:/etc/ld.so.conf文件中
将该目录加入到共享库的配置文件中 - 将动态库文件加入配置:执行vi /etc/ld.so.conf,在"include ld.so.conf.d/*.conf"下方增加"/usr/local/lib"。
- 保存后,在命令行终端执行:
/sbin/ldconfig -v
ldconfig
其作用是将文件/etc/ld.so.conf列出的路径下的库文件缓存到/etc/ld.so.cache以供使用,因此当安装完一些库文件,或者修改/etc/ld.so.conf增加了库的新搜索路径,需要运行一下ldconfig,使所有的库文件都被缓存到文件/etc/ld.so.cache中,如果没做,可能会找不到刚安装的库。
经过以上三个步骤,"error while loading shared libraries"的问题通常情况下就可以解决了。
输入命令
sudo ldconfig

然后再执行即可
矩阵运算
第二章习题
熟悉 Eigen 矩阵运算 (3 分,约 2 小时)
Eigen(http://eigen.tuxfamily.org)是常用的 C++ 矩阵运算库,具有很高的运算效率。大部分需要在 C++ 中使用矩阵运算的库,都会选⽤ Eigen 作为基本代数库,例如 Google Tensorflow,Google Ceres,GTSAM等。本次习题,你需要使⽤ Eigen 库,编写程序,求解⼀个线性⽅程组。为此,你需要先了解⼀些有关线性方程组数值解法的原理。
设线性⽅程 A x = b Ax = b Ax=b,在 A A A 为方阵的前提下,请回答以下问题:
-
在什么条件下, x x x 有解且唯⼀?
-
高斯消元法的原理是什么?
-
QR 分解的原理是什么?
-
Cholesky 分解的原理是什么?
-
编程实现 A A A 为 100 × 100 随机矩阵时,用 QR 和 Cholesky 分解求 x x x 的程序。你可以参考本次课用到的 useEigen 例程。
提示:你可能需要参考相关的数学书籍或文章。请善用搜索引擎。Eigen 固定大小矩阵最支持到 50,所以你会用到动态大小的矩阵
解答
参考:
(1)当 R ( A ) = R ( A ∣ B ) R(A)=R(A|B) R(A)=R(A∣B) 时方程组有解,当 R ( A ) = R ( A , B ) = n R(A)=R(A,B)=n R(A)=R(A,B)=n(n为未知数个数)时方程组有唯一解
矩阵 A A A 满秩时有唯一解, A A A 满秩的判断条件为 ∣ A ∣ ≠ 0 |A|\not=0 ∣A∣=0
(2)高斯消元法是线性代数中的一种算法,可用于求解线性方程组的解,以及求出矩阵的秩,和求出可逆矩阵的逆矩阵。高斯消元法的原理是:通过用初等行变换将增广矩阵化为行阶梯阵,然后通过回带求解线性方程组的解。
若用初等行变换将增广矩阵 ( A B ) (A\space B) (A B) 化为 ( C D ) (C\space D) (C D) ,则AX = B与CX = D是同解方程组。
所以我们可以用初等行变换把增广矩阵转换为行阶梯阵,然后回代求出方程的解
参考:高斯消元原理
(3)QR分解
注意:这里被分解矩阵A不一定是方阵,也可以是非方阵。Q为正交矩阵,R为上三角矩阵。
注意:这里被分解的矩阵A必须是对称正定阵,L为下三角矩阵。
(5)QR分解和Cholesky分解的代码如下
根目录CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(decomp)
set(EXEC_PATH ${CMAKE_CURRENT_SOURCE_DIR}/bin)
# add subdir
add_subdirectory(cholesky)
add_subdirectory(qr)
QR分解CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(qrdecomp)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_FLAGS "-O3")
set(EXECUTABLE_OUTPUT_PATH ${EXEC_PATH})
include_directories(/usr/include/eigen3)
# include_directories(/usr/local/include/)
add_executable(qrdecomp qr_decomp.cpp)
代码如下
#include<iostream>
#include<Eigen/Dense>
#include<cmath>
#define MATRIX_SIZE 100
int main(int argc, char const *argv[])
{
// to solve Ax=b,where A is 100*100 matrix,b is 100*1 vector
Eigen::MatrixXd A=Eigen::MatrixXd::Random(MATRIX_SIZE,MATRIX_SIZE);
A=A*A.transpose(); // 保证半正定
Eigen::MatrixXd b=Eigen::MatrixXd::Random(MATRIX_SIZE,1);
std::cout <<"Matrix A :\n"<< A << std::endl;
std::cout<<"Vector b:\n"<<b<<std::endl;
Eigen::MatrixXd x;
x=A.colPivHouseholderQr().solve(b);
std::cout<<"x="<<x.transpose()<<std::endl;
return 0;
}
Cholesky分解CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(cholesky)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_FLAGS "-O3")
set(EXECUTABLE_OUTPUT_PATH ${EXEC_PATH})
include_directories(/usr/include/eigen3)
# include_directories(/usr/local/include/)
add_executable(cholesky cholesky_decomposition.cpp)
代码如下
#include<iostream>
#include<Eigen/Dense>
#include<cmath>
#define MATRIX_SIZE 100
int main(int argc, char const *argv[])
{
Eigen::MatrixXd A=Eigen::MatrixXd::Random(MATRIX_SIZE,MATRIX_SIZE);
Eigen::MatrixXd b=Eigen::MatrixXd::Random(MATRIX_SIZE,1);
A=A*A.transpose();
Eigen::MatrixXd x;
x=A.ldlt().solve(b);
std::cout<<"x = \n"<<x.transpose()<<std::endl;
return 0;
}
几何运算练习 (2 分,约 1 小时)
下面我们来练习如何使⽤ Eigen/Geometry 计算⼀个具体的例子。
设有小萝卜1⼀号和小萝卜二号位于世界坐标系中。小萝卜一号的位姿为: q 1 = [ 0.55 , 0.3 , 0.2 , 0.2 ] , t 1 = [ 0.7 , 1.1 , 0.2 ] T q_1 = [0.55, 0.3, 0.2, 0.2], t1 =[0.7, 1.1, 0.2]^T q1=[0.55,0.3,0.2,0.2],t1=[0.7,1.1,0.2]T( q q q 的第⼀项为实部)。这⾥的 q q q 和 t t t 表达的是 T c w T_{cw} Tcw,也就是世界到相机的变换关系。小萝卜二号的位姿为 q 2 = [ − 0.1 , 0.3 , − 0.7 , 0.2 ] , t 2 = [ − 0.1 , 0.4 , 0.8 ] T q_2 = [−0.1, 0.3, −0.7, 0.2], t_2 = [−0.1, 0.4, 0.8]^T q2=[−0.1,0.3,−0.7,0.2],t2=[−0.1,0.4,0.8]T。现在,小萝卜一号看到某个点在自身的坐标系下,坐标为 p 1 = [ 0.5 , − 0.1 , 0.2 ] T p_1 = [0.5, −0.1, 0.2]^T p1=[0.5,−0.1,0.2]T,求该向量在小萝卜二号坐标系下的坐标。请编程实现此事,并提交你的程序。
提示:
-
四元数在使用前需要归⼀化。
-
请注意 Eigen 在使用四元数时的虚部和实部顺序。
-
参考答案为 p 2 = [ 1.08228 , 0.663509 , 0.686957 ] T p_2 = [1.08228, 0.663509, 0.686957]^T p2=[1.08228,0.663509,0.686957]T。你可以用它验证程序是否正确。
解答
参考:
(1)用四元数的方法计算
整体思路是由 p 1 , q 1 , t 1 p_1,q_1, t_1 p1,q1,t1 计算点在世界坐标下的坐标 p w p_w pw
先把四元数归一化,题目给出的表达是 T c w T_{cw} Tcw,是世界到相机的变换关系,所以要先把 q 1 q_1 q1 转化为相机到世界的变换,也就是 q 1 q_1 q1 的逆可以表达相反的变换
对于单位四元数,其逆和共轭就是同一个量,而四元数的共轭是把虚部取成相反数,所以在归一化的时候把
q
1
q_1
q1 的虚部取为相反数就行了。
p
w
=
q
1
∗
(
p
1
−
t
1
)
p_w = q_1 * (p_1 - t_1)
pw=q1∗(p1−t1)
然后计算
p
w
p_w
pw 在萝卜二号坐标系的坐标
p
2
=
p
w
∗
q
2
+
t
2
p_2 = p_w * q_2 + t_2
p2=pw∗q2+t2
代入如下
//本程序用来求解位姿变换问题
#include <iostream>
#include <cmath>
#include <Eigen/Core>
#include <Eigen/Dense>
// Eigen 几何模块
#include <Eigen/Geometry>
int main( int argc, char** argv)
{
Eigen::Vector3d p1,t1,t2;
p1 << 0.5,-0.1,0.2;
t1 << 0.7,1.1,0.2;
t2 << -0.1,0.4,0.8;
// 四元数Eigen::Quaterniond 的正确初始化顺序为Eigen::Quaterniond(w,x,y,z)
// 而 coeffs的顺序是(x,y,z,w),w 为实部,前三者为虚部
// 因为要表示相反的旋转,故输入为q1的共轭,即实部不变,虚部变为相反数
Eigen::Quaterniond q1 = Eigen::Quaterniond(0.55,-0.3,-0.2,-0.2).normalized();
std::cout << "q1 coeffs is \n"<<q1.coeffs().transpose() << std::endl;
Eigen::Quaterniond q2 = Eigen::Quaterniond(-0.1,0.3,-0.7,0.2).normalized();
std::cout << "q2 coeffs is \n"<<q2.coeffs().transpose() << std::endl;
Eigen::Vector3d pw = q1*(p1-t1); //数学上是qpq-1
Eigen::Vector3d p2 = q2*pw + t2;
std::cout << p2.transpose() << std::endl;
return 0;
}
(2)用变换矩阵的方法
同样的思路,先求出两个变换矩阵
T
1
T_1
T1 和
T
2
T_2
T2 ,
p
1
p_1
p1 和
T
1
T_1
T1 的逆矩阵相乘得到
p
w
p_w
pw, 然后再和
T
2
T_2
T2 相乘得到
p
2
p_2
p2
p
2
=
T
2
∗
T
1
−
1
∗
p
1
p_2 = T_2 * T_1^{-1} * p_1
p2=T2∗T1−1∗p1
代码如下
#include<iostream>
#include<Eigen/Dense>
#include<Eigen/Geometry>
int main ( int argc, char** argv )
{
Eigen::Quaternion<double> q1(0.55,0.3, 0.2, 0.2 );//小萝卜1号坐标相对于世界坐标的四元数
Eigen::Quaternion<double> q2(-0.1,0.3, -0.7, 0.2);//小萝卜2号坐标相对于世界坐标的四元数
q1.normalize();//四元数归一化
q2.normalize();//四元数归一化
Eigen::Vector3d t1(0.7, 1.1, 0.2);//小萝卜1号坐标相对于世界坐标的平移向量
Eigen::Vector3d t2(-0.1, 0.4, 0.8);//小萝卜2号坐标相对于世界坐标的平移向量
Eigen::Matrix3d R1 = q1.toRotationMatrix();//小萝卜1号的四元数 转为 旋转矩阵
Eigen::Matrix3d R2 = q2.toRotationMatrix();//小萝卜2号的四元数 转为 旋转矩阵
Eigen::Isometry3d Tcw1(R1);//创建小萝卜1号相对于世界坐标的欧氏变换矩阵,并用旋转矩阵 初始化
Eigen::Isometry3d Tcw2(R2);//创建小萝卜2号相对于世界坐标的欧氏变换矩阵,并用旋转矩阵 初始化
Tcw1.pretranslate(t1);//接着,用平移向量初始化小萝卜1号的欧氏变换矩阵
Tcw2.pretranslate(t2);//接着,用平移向量初始化小萝卜2号的欧氏变换矩阵
Eigen::Vector3d p1(0.5, -0.1, 0.2);//点d在小萝卜1号坐标下的向量表示
Eigen::Vector3d pd_w = Tcw1.inverse() * p1;//算出点d在世界坐标下的向量表示,其中,Tcw表示world to camera 的坐标变换,Tcw.inverse表示camera to world的变换
Eigen::Vector3d p2 = Tcw2 * pd_w;//算出点d在小萝卜2号的向量表示
std::cout << p2.transpose() << std::endl;
return 0;
}
CMakeLists.txt如下
cmake_minimum_required(VERSION 2.8)
project(geo_calc)
include_directories("/usr/include/eigen3")
set(EXEC_PATH ${CMAKE_CURRENT_SOURCE_DIR}/bin)
set(EXECUTABLE_OUTPUT_PATH ${EXEC_PATH})
add_executable(geo geo_calc.cpp)
结果如下

旋转的表达 (2 分,约 1 小时)
课程中提到了旋转可以用旋转矩阵、旋转向量与四元数表达,其中旋转矩阵与四元数是日常应用中常见的表达方式。请根据课件知识,完成下述内容的证明。
-
设有旋转矩阵 R R R,证明 R T R = I R^TR=I RTR=I 且 det R R R = +11。
-
设有四元数 q q q,我们把虚部记为 ε \varepsilon ε,实部记为 η \eta η,那么 q = ( ε , η ) q = (\varepsilon, \eta) q=(ε,η)。请说明 ε \varepsilon ε 和 η η η 的维度。
-
定义运算 + 和 ⊕ 为:
q + = [ η 1 − ε × ε − ε T η ] , q ⊕ = [ η 1 + ε × ε − ε T η ] , (1) q^+=\left[\begin{array}{cc}\eta\mathbf{1}-\varepsilon^\times&\varepsilon\\ -\varepsilon^\mathrm{T}&\eta\end{array}\right],\quad q^\oplus=\left[\begin{array}{cc}\eta\mathbf{1}+\varepsilon^\times&\varepsilon\\ -\varepsilon^\mathrm{T}&\eta\end{array}\right], \tag{1} q+=[η1−ε×−εTεη],q⊕=[η1+ε×−εTεη],(1)
其中运算 × ^{\times} × 含义与 ∧ ^{\wedge} ∧ 相同,即取 ε 的反对称矩阵(它们都成叉积的矩阵运算形式), 1 \mathbf{1} 1 为单位矩阵请证明对任意单位四元数 q 1 , q 2 q_1, q_2 q1,q2,四元数乘法可写成矩阵乘法:
q 1 ⋅ q 2 = q 1 + q 2 (2) q_{1}\cdot q_{2} =q_1^+q_2 \tag{2} q1⋅q2=q1+q2(2)
或者
q 1 ⋅ q 2 = q 2 ⊕ q 1 . (3) q_{1}\cdot q_{2}=q_{2}^{\oplus}q_{1}. \tag{3} q1⋅q2=q2⊕q1.(3)
解答
(1)设有两组正交基 ( e 1 , e 2 , e 3 ) (e_1,e_2,e_3) (e1,e2,e3) 和 ( e 1 ′ , e 2 ′ , e 3 ′ ) (e_1',e_2',e_3') (e1′,e2′,e3′) ,以及在这两组正交基下的坐标 a = ( a 1 , a 2 , a 3 ) a=(a_1,a_2,a_3) a=(a1,a2,a3) 与 a ′ = ( a 1 ′ , a 2 ′ , a 3 ′ ) a'=(a_1',a_2',a_3') a′=(a1′,a2′,a3′)
根据坐标系的定义
[
e
1
,
e
2
,
e
3
]
[
a
1
a
2
a
3
]
=
[
e
1
′
,
e
2
′
,
e
3
′
]
[
a
1
′
a
2
′
a
3
′
]
[\mathbf{e}_1,\mathbf{e}_2,\mathbf{e}_3]\left[\begin{array}{c}\mathbf{a}_1\\ \mathbf{a}_2\\ \mathbf{a}_3\end{array}\right]=[\mathbf{e}_1',\mathbf{e}_2',\mathbf{e}_3']\left[\begin{array}{c}\mathbf{a}_1'\\ \mathbf{a}_2'\\ \mathbf{a}_3'\end{array}\right]
[e1,e2,e3]
a1a2a3
=[e1′,e2′,e3′]
a1′a2′a3′
则
[
a
1
a
2
a
3
]
=
[
c
1
T
e
1
′
′
e
1
T
e
2
′
′
e
1
T
e
3
′
′
e
2
T
e
1
′
′
e
2
T
e
2
′
′
e
2
T
e
3
′
′
e
3
T
e
1
′
′
e
3
T
e
2
′
′
e
3
T
e
3
′
′
]
[
a
1
′
′
a
2
′
′
a
2
′
′
]
=
R
a
′
(1)
\left[\begin{array}{c}\mathbf{a}_{1}\\ \mathbf{a}_{2}\\ \mathbf{a}_{3}\end{array}\right]=\left[\begin{array}{ccc}\mathbf{c}_{1}^{\mathbf{T}}\mathbf{e}_{1}^{\prime\prime}&\mathbf{e}_{1}^{\mathbf{T}}\mathbf{e}_{2}^{\prime\prime}&\mathbf{e}_{1}^{\mathbf{T}}\mathbf{e}_{3}^{\prime\prime}\\ \mathbf{e}_{2}^{\mathbf{T}}\mathbf{e}_{1}^{\prime\prime}&\mathbf{e}_{2}^{\mathbf{T}}\mathbf{e}_{2}^{\prime\prime}&\mathbf{e}_{2}^{\mathbf{T}}\mathbf{e}_{3}^{\prime\prime}\\ \mathbf{e}_{3}^{\mathbf{T}}\mathbf{e}_{1}^{\prime\prime}&\mathbf{e}_{3}^{\mathbf{T}}\mathbf{e}_{2}^{\prime\prime}&\mathbf{e}_{3}^{\mathbf{T}}\mathbf{e}_{3}^{\prime\prime}\end{array}\right]\left[\begin{array}{c}\mathbf{a}_{1}^{\prime\prime}\\ \mathbf{a}_{2}^{\prime\prime}\\ \mathbf{a}_{2}^{\prime\prime}\end{array}\right]=\mathrm{Ra'} \tag{1}
a1a2a3
=
c1Te1′′e2Te1′′e3Te1′′e1Te2′′e2Te2′′e3Te2′′e1Te3′′e2Te3′′e3Te3′′
a1′′a2′′a2′′
=Ra′(1)
其中
R
R
R 为旋转矩阵,
R
T
R
R^TR
RTR 为:
R
T
R
=
[
e
1
T
e
1
′
e
2
T
e
1
′
e
3
T
e
1
′
e
1
T
e
2
′
e
2
T
e
2
′
e
3
T
e
2
′
e
1
T
e
3
′
e
2
T
e
3
′
e
3
T
e
3
′
]
[
c
1
T
e
1
′
e
1
T
e
2
′
e
1
T
e
3
′
e
2
T
e
1
e
2
T
e
2
′
e
2
T
e
3
′
e
3
T
e
1
′
e
3
T
e
2
′
e
3
T
e
3
′
]
=
I
(2)
\mathrm{R}^T\mathrm{R}=\left[\begin{array}{cccc}e_1^T e_1'&e_2^T e_1'&e_3^T e_1'\\ e_1^T e_2'&e_2^T e_2'&e_3^T e_2'\\ e_1^T e_3'&e_2^T e_3'&e_3^T e_3'\end{array}\right]\left[\begin{array}{cccc}c_1^T e_1'&e_1^T e_2'&e_1^T e_3'\\ e_2^T e_1&e_2^T e_2'&e_2^T e_3'\\ e_3^T e_1'&e_3^T e_2'&e_3^T e_3'\end{array}\right]=I \tag{2}
RTR=
e1Te1′e1Te2′e1Te3′e2Te1′e2Te2′e2Te3′e3Te1′e3Te2′e3Te3′
c1Te1′e2Te1e3Te1′e1Te2′e2Te2′e3Te2′e1Te3′e2Te3′e3Te3′
=I(2)
其中
(
e
1
T
e
1
′
)
×
(
e
1
T
e
1
′
)
+
(
e
2
T
e
1
′
)
×
(
e
2
T
e
1
′
)
+
(
e
3
T
e
1
′
)
×
(
e
3
T
e
1
′
)
=
e
1
T
e
1
′
e
1
T
e
1
′
+
e
2
T
e
1
′
e
2
T
e
1
′
+
e
3
T
e
1
′
e
3
T
e
1
′
=
(
e
1
T
e
1
′
e
1
T
+
e
2
T
e
1
′
e
2
T
+
e
3
T
e
1
′
e
3
T
)
e
1
′
=
(
e
1
′
T
e
1
e
1
T
+
e
1
′
T
e
2
e
2
T
+
e
1
′
T
e
3
e
3
T
)
e
1
′
=
(
e
1
′
)
T
(
e
1
e
1
T
+
e
2
e
2
T
+
e
3
e
3
T
)
e
1
′
=
(
e
1
′
)
T
e
1
′
=
1
\begin{aligned} &\left(\mathrm{e}_{1}^{\mathrm{T}}\mathrm{e}_{1}^{\prime}\right)\times\left(\mathrm{e}_{1}^{\mathrm{T}}\mathrm{e}_{1}^{\prime}\right)+\left(\mathrm{e}_{2}^{\mathrm{T}}\mathrm{e}_{1}^{\prime}\right)\times\left(\mathrm{e}_{2}^{\mathrm{T}}\mathrm{e}_{1}^{\prime}\right)+\left(\mathrm{e}_{3}^{\mathrm{T}}\mathrm{e}_{1}^{\prime}\right)\times\left(\mathrm{e}_{3}^{\mathrm{T}}\mathrm{e}_{1}^{\prime}\right) \\ &=\mathrm{e}_1^\mathrm{T}\mathrm{e}_1'\mathrm{e}_1^\mathrm{T}\mathrm{e}_1'+\mathrm{e}_2^\mathrm{T}\mathrm{e}_1'\mathrm{e}_2^\mathrm{T}\mathrm{e}_1'+\mathrm{e}_3^\mathrm{T}\mathrm{e}_1'\mathrm{e}_3^\mathrm{T}\mathrm{e}_1' \\ &=(\mathrm{e}_1^\mathrm{T}\mathrm{e}_1'\mathrm{e}_1^\mathrm{T}+\mathrm{e}_2^\mathrm{T}\mathrm{e}_1'\mathrm{e}_2^\mathrm{T}+\mathrm{e}_3^\mathrm{T}\mathrm{e}_1'\mathrm{e}_3^\mathrm{T})\mathrm{e}_1' \\ &=(\mathrm{e}_1'^\mathrm{T}\mathrm{e}_1\mathrm{e}_1^\mathrm{T}+\mathrm{e}_1'^\mathrm{T}\mathrm{e}_2\mathrm{e}_2^\mathrm{T}+\mathrm{e}_1'^\mathrm{T}\mathrm{e}_3\mathrm{e}_3^\mathrm{T})\mathrm{e}_1' \\ &=(\mathrm{e}_1')^\mathrm{T}(\mathrm{e}_1\mathrm{e}_1^\mathrm{T}+\mathrm{e}_2\mathrm{e}_2^\mathrm{T}+\mathrm{e}_3\mathrm{e}_3^\mathrm{T})\mathrm{e}_1' \\ &=(\mathrm{e}_1')^\mathrm{T}\mathrm{e}_1' \\ &=1 \end{aligned}
(e1Te1′)×(e1Te1′)+(e2Te1′)×(e2Te1′)+(e3Te1′)×(e3Te1′)=e1Te1′e1Te1′+e2Te1′e2Te1′+e3Te1′e3Te1′=(e1Te1′e1T+e2Te1′e2T+e3Te1′e3T)e1′=(e1′Te1e1T+e1′Te2e2T+e1′Te3e3T)e1′=(e1′)T(e1e1T+e2e2T+e3e3T)e1′=(e1′)Te1′=1
由于
1
=
det
(
I
)
=
det
(
R
T
R
)
=
det
(
R
T
)
det
(
R
)
=
(
det
(
R
)
)
2
1=\det(\mathrm{I})=\det(\mathrm{R}^\mathrm{T}\mathrm{R})=\det(\mathrm{R}^\mathrm{T})\det(\mathrm{R})=(\det(\mathrm{R}))^2
1=det(I)=det(RTR)=det(RT)det(R)=(det(R))2
所以
det
(
R
)
=
±
1
\det(R)=\pm1
det(R)=±1
按照定义可得
(2) ε \varepsilon ε 的维度是3, η \eta η 的维度是1。
(3)设 q 1 = [ ε 1 , η 1 ] T , q 2 = [ ε 2 , η 2 ] T q_1=[\varepsilon_1,\eta_1]^T,q_2=[\varepsilon_2,\eta_2]^T q1=[ε1,η1]T,q2=[ε2,η2]T
∴ q 1 q 2 = [ η 1 ε 2 + η 2 ε 1 + ε 1 × ε 2 , η 1 η 2 − ε 1 T ε 2 ] T ∴ q 1 + q 2 = [ η 1 1 − ε 1 × ε 1 − ε 1 T η 1 ] [ ε 2 η 2 ] = [ η 1 ε 2 + ε 1 × ε 2 + ε 1 η 2 , η 1 η 2 − ε 1 T ε 2 ] T = q 1 q 2 q 2 ⊕ q 1 = [ η 2 1 + ε 2 × ε 2 − ε 2 T η 2 ] [ ε 1 η 1 ] = [ η 2 ε 1 − ε 1 × ε 2 + ε 2 η 1 , − ε 2 T ε 1 + η 2 η 1 ] T = [ η 2 ε 1 + ε 2 × ε 1 + ε 2 η 1 , − ε 1 T ε 2 + η 2 η 1 ] T = q 1 q 2 \begin{aligned} \therefore q_1q_2 &=[\eta_1\varepsilon_2+\eta_2\varepsilon_1+\varepsilon_1\times \varepsilon_2,\eta_1\eta_2-\varepsilon_1^T \varepsilon_2]^T \\\\ \therefore q_1^+q_2 &= \left[\begin{array}{cc}\eta_1\mathbf{1}-\varepsilon_1^\times&\varepsilon_1\\ -\varepsilon_1^\mathrm{T}&\eta_1\end{array}\right] \left[ \begin{matrix} \varepsilon_2\\\eta_2 \end{matrix} \right] \\ &=[\eta_1 \varepsilon_2+\varepsilon_1^{\times} \varepsilon_2+\varepsilon_1\eta_2,\eta_1\eta_2-\varepsilon_1^T \varepsilon_2]^T \\ &=q_1q_2 \\\\ q_2^{\oplus}q_1 &=\left[\begin{array}{cc}\eta_2\mathbf{1}+\varepsilon_2^\times&\varepsilon_2\\ -\varepsilon_2^\mathrm{T}&\eta_2\end{array}\right] \left[ \begin{matrix} \varepsilon_1\\\eta_1 \end{matrix} \right] \\ &=[\eta_2\varepsilon_1-\varepsilon_1^{\times} \varepsilon_2+\varepsilon_2\eta_1,-\varepsilon_2^T \varepsilon_1+\eta_2\eta_1]^T \\ &=[\eta_2\varepsilon_1+\varepsilon_2^{\times} \varepsilon_1+\varepsilon_2\eta_1,-\varepsilon_1^T \varepsilon_2+\eta_2\eta_1]^T \\ &=q_1q_2 \end{aligned} ∴q1q2∴q1+q2q2⊕q1=[η1ε2+η2ε1+ε1×ε2,η1η2−ε1Tε2]T=[η11−ε1×−ε1Tε1η1][ε2η2]=[η1ε2+ε1×ε2+ε1η2,η1η2−ε1Tε2]T=q1q2=[η21+ε2×−ε2Tε2η2][ε1η1]=[η2ε1−ε1×ε2+ε2η1,−ε2Tε1+η2η1]T=[η2ε1+ε2×ε1+ε2η1,−ε1Tε2+η2η1]T=q1q2
罗德里格斯公式的证明 (2 分,约 1 小时)
罗德里格斯公式描述了从旋转向量到旋转矩阵的转换关系。设旋转向量长度为 θ,方向为
n
n
n,那么旋转矩阵
R
R
R 为:
R
=
cos
θ
I
−
(
1
−
cos
θ
)
n
n
T
+
sin
θ
n
∧
.
(4)
R=\cos\theta I-(1-\cos\theta)\boldsymbol{nn}^T+\sin\theta\boldsymbol{n}^\wedge. \tag{4}
R=cosθI−(1−cosθ)nnT+sinθn∧.(4)
我们在课程中仅指出了该式成立,但没有给出证明。请你证明此式。
提示:参考https://en.wikipedia.org/wiki/Rodrigues%27_rotation_formula。
四元数运算性质的验证 (1 分,约 1 小时)
课程中介绍了单位四元数可以表达旋转。其中,在谈论用四元数
q
q
q 旋转点
p
p
p 时,结果为:
p
=
q
p
q
−
1
.
(5)
p =q p q^{-1}. \tag{5}
p=qpq−1.(5)
我们说,此时
p
′
p ′
p′ 必定为虚四元数(实部为零)。请你验证上述说法。
此外,上式亦可写成矩阵运算: p ′ = Q p p' = Qp p′=Qp。请根据你的推导,给出矩阵 Q Q Q。注意此时 p p p 和 p ′ p′ p′ 都是四元数形式的变量,所以 Q Q Q 为 4 × 4 的矩阵。
提示:如果使用第 4 题结果,那么有:
p
′
=
q
p
q
−
1
=
q
+
p
+
q
−
1
=
q
+
q
−
1
⊕
v
.
(6)
\begin{aligned} p^{\prime}& =q p q^{-1}=q^{+}p^{+}q^{-1} \\ &=q^{+}q^{-1^{\oplus}}v. \end{aligned} \tag{6}
p′=qpq−1=q+p+q−1=q+q−1⊕v.(6)
从而可以导出四元数至旋转矩阵的转换方式:
R
=
q
+
q
−
1
⊕
.
(7)
R=q^+q^{-1^{\oplus}}. \tag{7}
R=q+q−1⊕.(7)
*熟悉 C++11 (2 分,约 1 小时)
请注意本题为附加题。
C++ 是⼀门古老的语言,但它的标准至今仍在不断发展。在 2011 年、2014 年和 2017 年,C++ 的标准又进行了更新,被称为 C++11,C++14,C++17。其中,C++11 标准是最重要的⼀次更新,让 C++发生了重要的改变,也使得近年来的 C++ 程序与你在课本上(比如谭浩强)学到的 C++ 程序有很⼤的不同。你甚至会惊叹这是⼀种全新的语言。C++14 和 C++17 则是对 11 标准的完善与扩充。
越来越多的程序开始使用 11 标准,它也会让你在写程序时更加得心应手。本题中,你将学习⼀些 11标准下的新语法。请参考本次作业 books/目录下的两个 pdf,并回答下面的问题。
设有类 A,并有 A 类的⼀组对象,组成了⼀个 vector。现在希望对这个 vector 进行排序,但排序的方式由A.index 成员大小定义。那么,在 C++11 的语法下,程序写成:
#include <iostream>
#include <vector>
#include <algorithm>
using namespace std;
class A {
public:
A(const int& i ) : index(i) {}
int index = 0;
};
int main() {
A a1(3), a2(5), a3(9);
vector<A> avec{a1, a2, a3};
std::sort(avec.begin(), avec.end(), [](const A&a1, const A&a2) {return a1.index<a2.index;});
for ( auto& a: avec ) cout<<a.index<<" ";
cout<<endl;
return 0;
}
请说明该程序中哪些地方用到了 C++11 标准的内容。提示:请关注范围 for 循环、自动类型推导、lambda表达式等内容。
补充习题
有两个右手系1和2,其中2系的x轴与1系的y轴方向相同,2系的y轴与1系z轴方向相反,2系的z轴与1系的x轴相反,两个坐标系原点重合,求R12,求1系中(1,1,1)在2系中的坐标。请自己编写一个c++程序实现它,并用Cmake编译,得到能输出答案的可执行文件
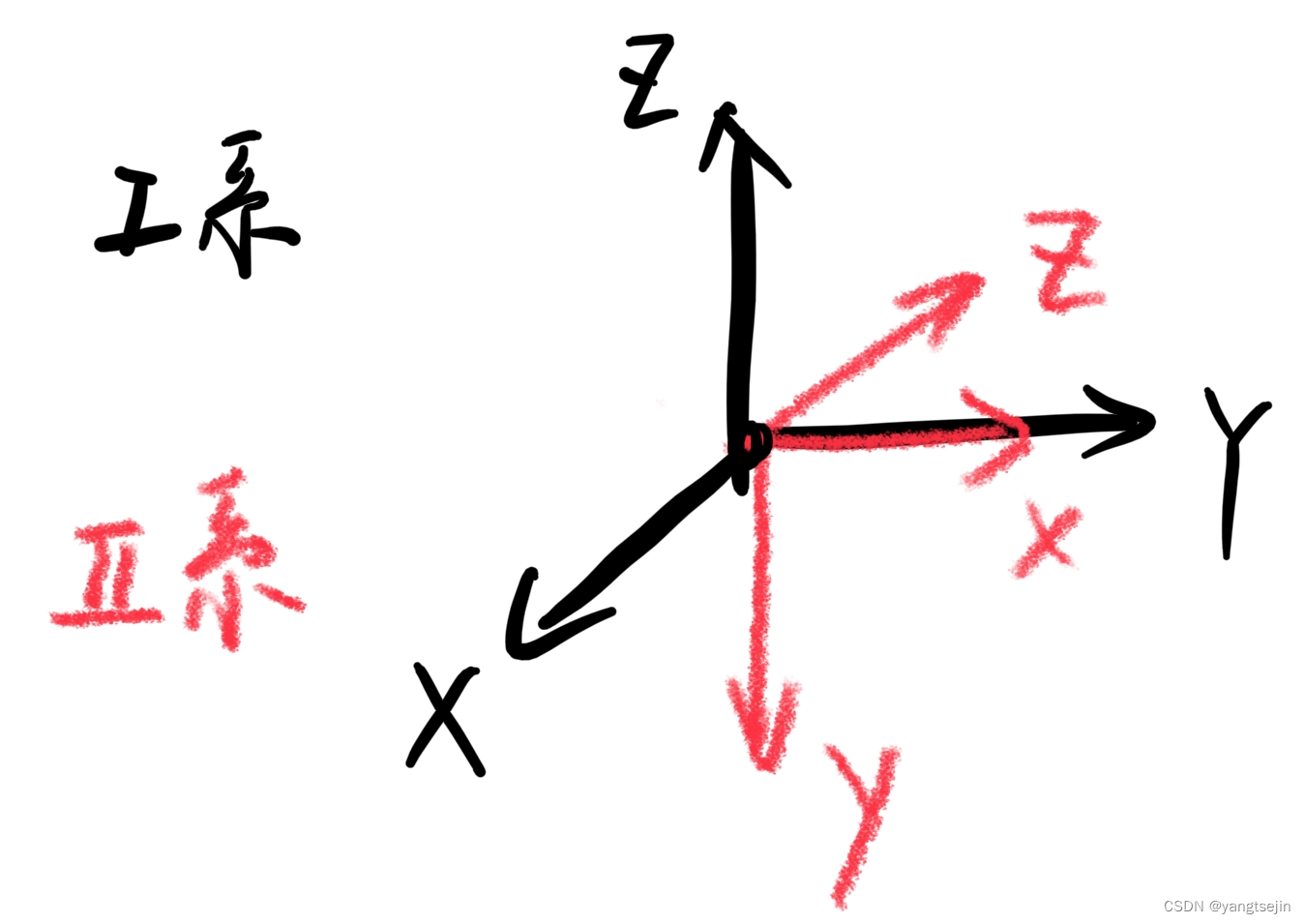
这个过程会迫使我们思考到底是坐标系变换,如何从零写出一个变换,如何使用坐标变化来改变点的坐标;你会对欧拉角的使用,尤其是动静轴和旋转顺序印象极其深刻
若⾏列式为-1,通常称为瑕旋转(inproper rotation,对应物理当中旋转 + 镜像)。 ↩︎















 755
755

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









