







 文章介绍了动态规划算法的四个关键步骤:状态定义、状态转移方程、正确性证明和程序实现,以数字三角形问题为例,强调了状态定义在动态规划中的核心作用和不同状态定义带来的影响。
文章介绍了动态规划算法的四个关键步骤:状态定义、状态转移方程、正确性证明和程序实现,以数字三角形问题为例,强调了状态定义在动态规划中的核心作用和不同状态定义带来的影响。
上节课呢,我们学习了递推算法的一般求解步骤:先是定义递推状态,然后推导递推公式,最后是程序设计与实现。并且为了顺利完成递推算法,还介绍了在推导递推公式中的重要指导思想“容斥原理”的相关内容。
递推算法解决的主要类型问题之一,就是计数类问题。就像上节课我们提到的,求 n 个月以后的小兔子数量,求拼凑钱币的方法总数,还有更早之前学习的,求前 n 个数字二进制表示中 1 的个数,等等,这些都是计数类问题。
而在递推算法中,还有一类不同于计数类问题,它是求解最优化解的问题的算法,这类算法有一个专有名称,叫做:动态规划。这就是我们今天要学习的,递推算法中的一个子集算法,动态规划算法。
初识:数字三角形问题
想了解什么是动态规划算法,咱们得先从一个叫做“数字三角形”的简单的动态规划问题开始。数字三角形这个问题很简单,这里给出了一个由数字组成的 6 层三角形,如下图所示:
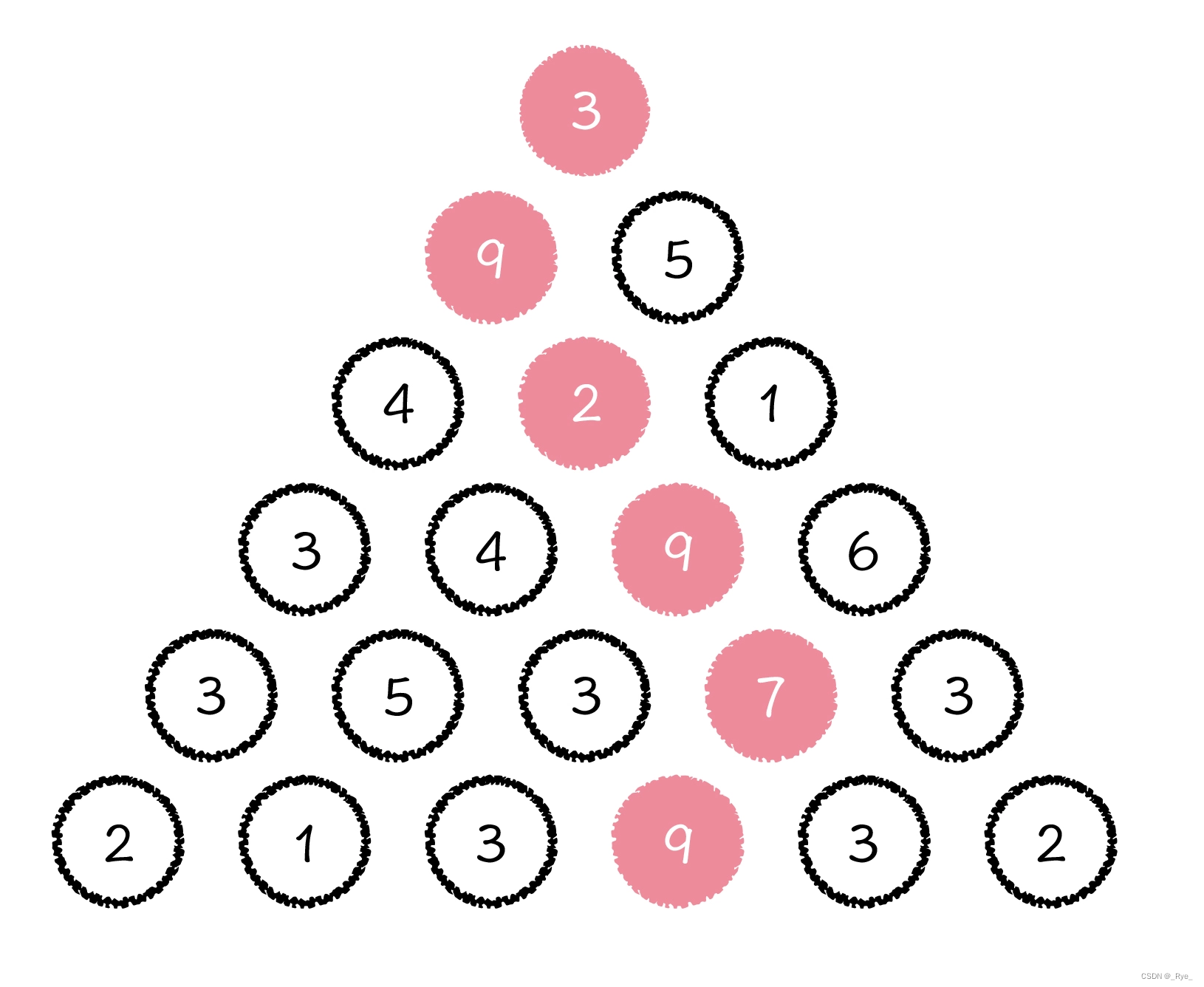
由上到下,第 i 层由 i 个数字组成,目标从第 1 层开始,每次只能向下走到相邻的两个节点,求走到最后一层路径上面数字的最大和值是多少。就像图中标红的一条线路,就是路径和值最大的一条路线,和值为 39。如果给你的是一个 n 层的数字三角形,你该如何解决这个问题呢?
从数学归纳法思想出发,如果我们已知到第三层所有点的最大值,那么我们就可以计算得到起始点到第四层每一个的路径最大和值。如图 2 所示:所有绿色节点和蓝色节点,就是已经求出来的,起始点到其路径最大和值的点。其中的数字是根据 图 1 中的数字三角形计算所得,比如第 2 层的 12,是由图 1 中第 1 层的 3 与原所在位置的 9,相加之和的结果。
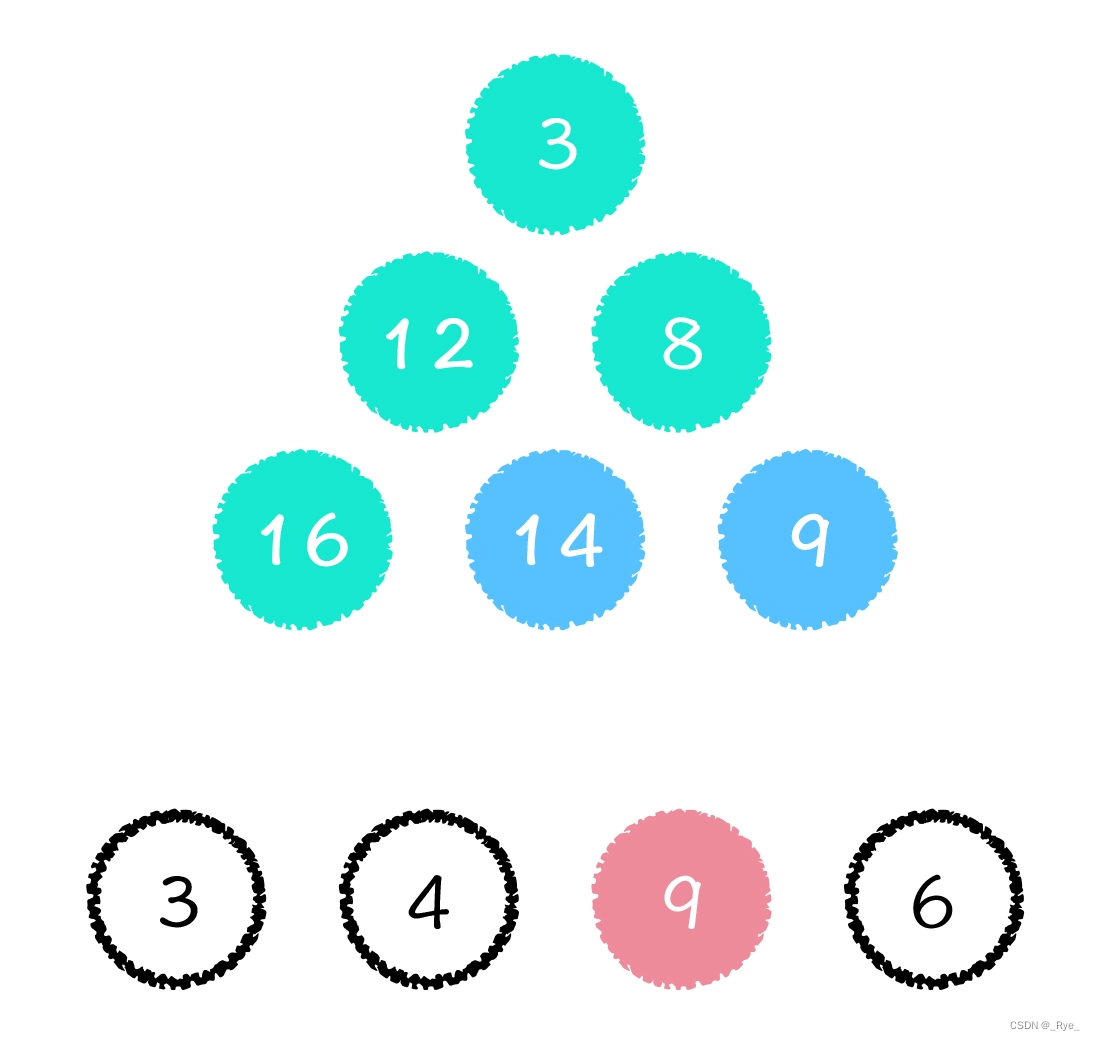
从图 2 中可知,如果想求从起始点到红色的点,也就是第 4 行数字 9 点的路径最大和值,那么根据数字三角形的规则,我们只能从图中的两个蓝色点转移到红色点。那究竟选择从哪个点走到红色点呢?当然是选择其中和值较大的了,也就是从和值为 14 的点转移到红色点,得到的就是起始点到红色点的路径最大和值。
我们来总结一下上述这个过程,若我们已知从起始点到第 i - 1 层上每个点的路径最大和值,那我们又是怎么得到从起始点到第 i 层上每个点的路径最大和值呢?请看下图:
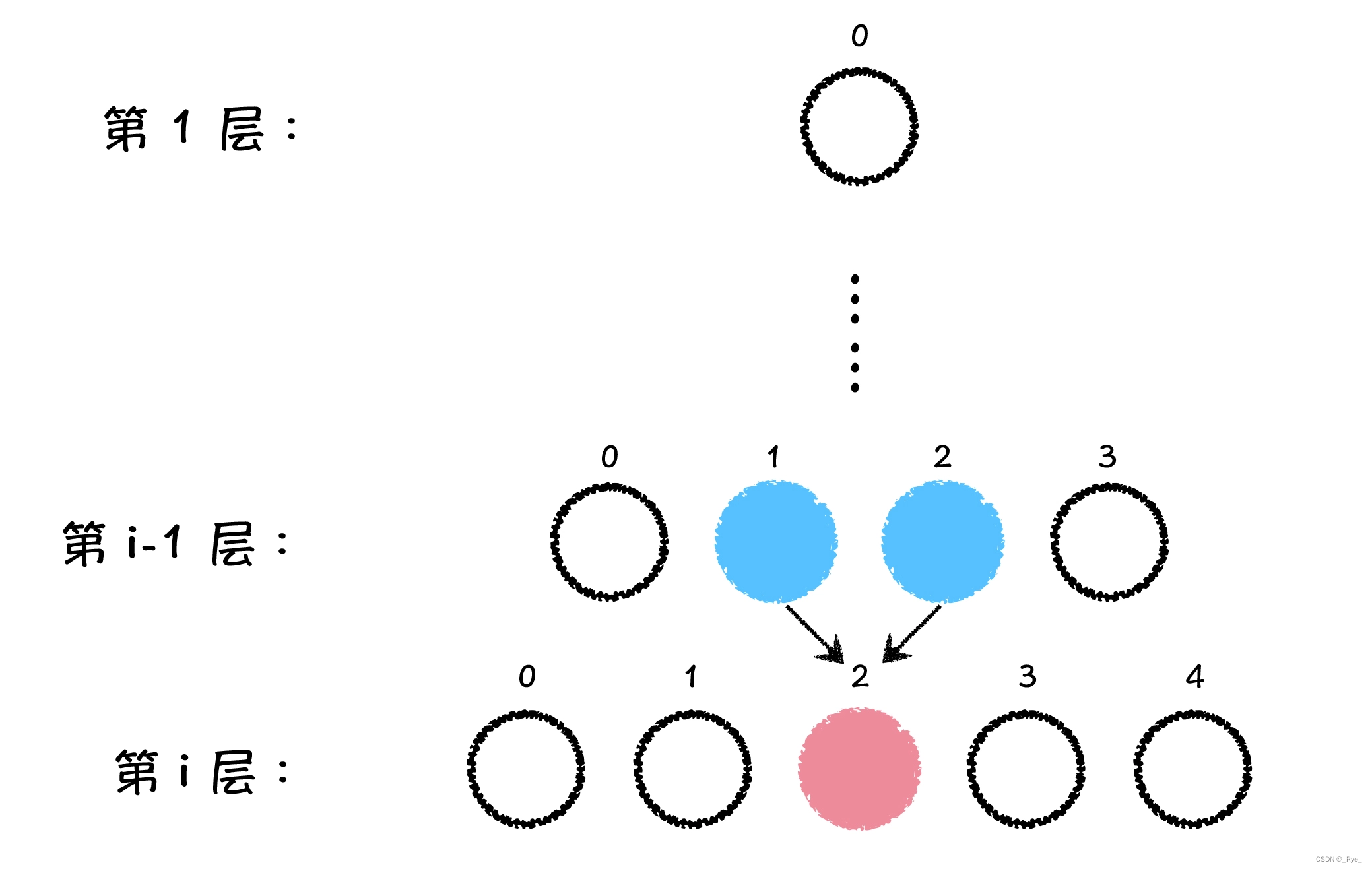
如图所示,我们给每一层的节点,从左向右,从 0 开始依次编号,那么第 i 行的第 3 个点对应的坐标就是 (i, 2) 点。从第 1 层的点想要到达红色 (i, 2) 点,可以通过 (i - 1, 1) 点到达,或者通过 (i - 1, 2) 点到达。在已知从起始点到第 i-1 层上每个点的路径最大和值的前提下,从第 1 层到 (i, 2) 点的最大和值,就是在 (i - 1, 1) 和 (i - 1, 2) 这两个值中,选择一个路径和值最大的,然后转移到 (i, 2) 点,即为第 1 层到 (i, 2) 点的路径最大和值。
所以,我们基本可以确定一件事情了,如果我们要是知道第 1 层 到 i - 1 层的每个点的路径最大和值,那就很容易求得到第 i 层每个点的路径最大和值,从而推导出 i + 1 层、i + 2 层等等的路径最大和值,直到最后一层。
又因为,我们已知第 1 层到第 1 层每一个点的路径最大和值,就是起始点原本的值,所以沿着上面这个思路,就可以按照层序,来求解第一层到每一层的每个节点的路径最大和值了。
仔细体会一下,上面这个题目的推导过程,有没有点儿我们前面说的数学归纳法思想以及递推算法的意思?你会发现,岂止是有点儿,简直如出一辙。这就是我们所说的,递推算法中那类求解最优化问题的方法,动态规划。
下面我们就正式来介绍一下动态规划问题的求解步骤。
动态规划算法的四步走
关于动态规划,也被简称为:DP(dynamic programming),它的问题类型非常的庞杂。如果按照问题类型来进行划分,可以分成:线性 DP、区间 DP,树型 DP,数位 DP,概率 DP 等等。说到动态规划中的概念呢,又有什么:最优子结构,重叠子问题,无后效性等等。这些都是让新手听起来特别摸不到头脑的总结性词汇。
但是你也不用着急犯晕,我们知道,任何总结,都来源于观察。所以今天,我想让你掌握的,不是这些前人总结的词汇概念,而是一套观察、学习动态规划的方法。
这套方法分为四个步骤,它会使得你学习动态规划算法的过程事半功倍。如果你按照我的方法,进行了若干种动态规划问题学习以后,再找来一些其他资料,看看今天我跟你说的动态规划中的概念名词,你会对动态规划有一个更具体的理解。
那这个方法到底是哪四个步骤呢?其实就是:状态定义,状态转移方程,正确性证明,以及程序设计与实现。同时,它们也分别代表了学会一个动态规划问题的四个方面。
1. 状态定义
首先我们从状态定义讲起,提到状态定义,你应该不会陌生,上节课我们已经说过递推问题的确定递推状态,其实二者是一样的,都是一个有明确语义信息的数学符号。
理解一个动态归划问题的状态定义,是理解其解法的第一步,也是最重要的一步。如果你在往下进行推导的时候,发现进行不下去了,那往往就是状态定义有问题,这时你就需要回到这个第一步,琢磨琢磨新的状态定义了。
并且,我们一直在强调,对于动态规划的状态定义,不仅仅是要一个数学符号,还要一个明确的语义信息,你的理解可能是:不同的语义信息,对应的不就是不同的数学符号么?那今天,我们就用同一个数学符号,表示不同的语义信息,在接下来的求解过程中,你会发现这两种不同的语义信息,所衍生出来的后续步骤过程,是完全不同的。
回到前面说的数字三角形问题,我们可以作出两种状态定义:
第一种状态定义:dp[i][j] 代表从起始点,到 (i, j) 点的路径最大值。
第二种状态定义:dp[i][j] 代表从底边的某个点出发,到 (i, j) 点的路径最大值。
为了后续讲解方便,我们假设所有坐标都是从 1 开始的,也就是第一行第一个点的坐标是 (1, 1)。你会发现,这两种状态定义,数学符号都是 dp[i][j],而含义却完全相反,一个是从顶向下走,一个是从底向上走。对于第一种状态定义,如果数字三角形有 n 层的话,问题所求的最大值,就是在最后一层 dp[n] 中的某个值。而第二种状态定义,问题所求的最大值最终会存储在 dp[1][1] 这个状态值中。
2. 状态转移方程
看完了数字三角形问题的两种状态定义以后,下面就来讲讲状态转移方程。动态规划的状态转移方程,其实就是递推问题中所说的递推公式,只是从名字上更符合动态规划问题的情况。
状态转移,就是状态之间的转移,每一个状态的含义,在状态定义中规定的明明白白,而状态与状态之间的转移方式,是需要根据具体的问题以及具体的状态定义,进行具体分析。
根据刚才作的两种状态定义,我们可以分别画出来这样两种状态转移的方向:
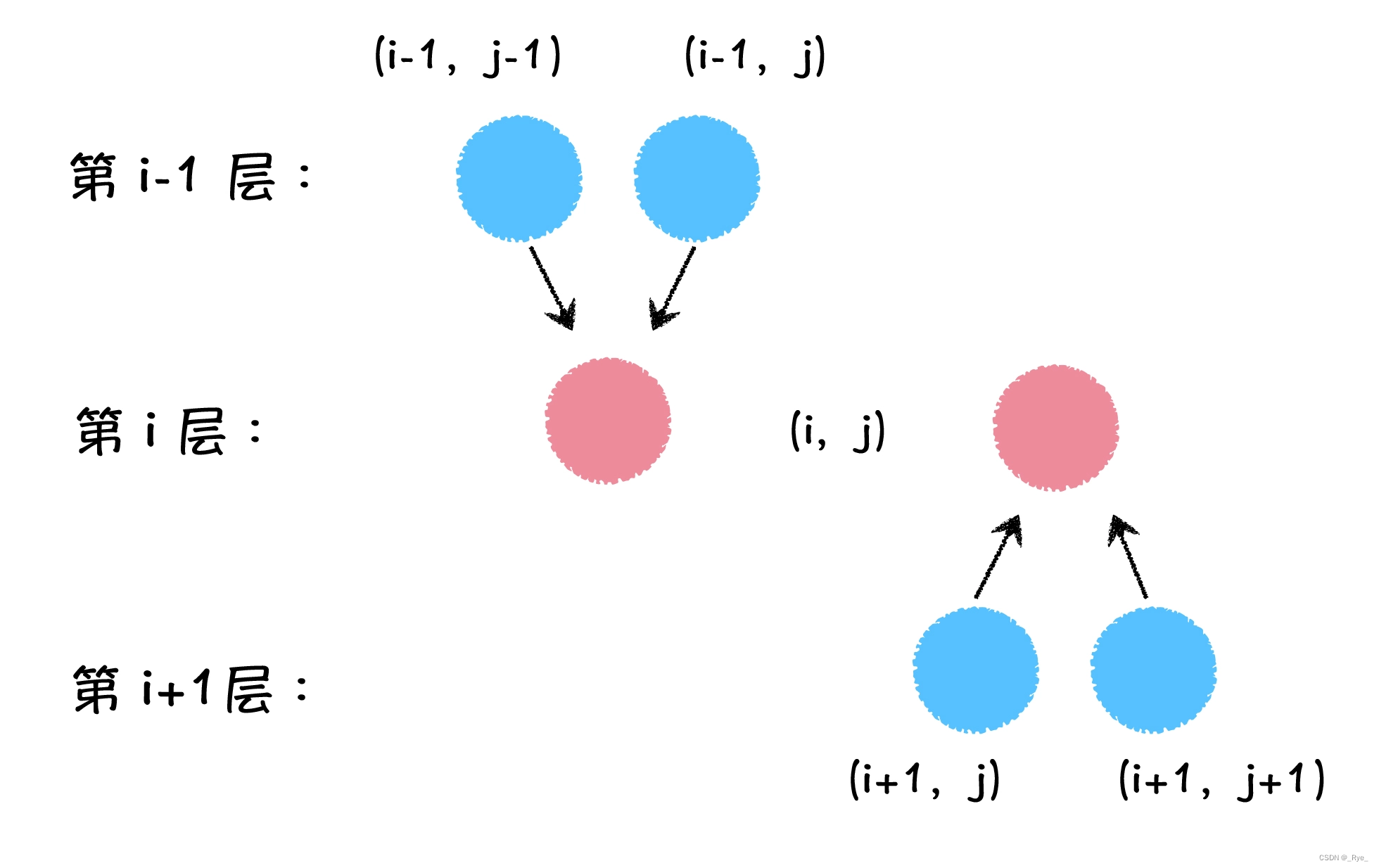
如图所示,我以左边是第一种状态定义下的状态转移方向为例,来说明它是如何转移的。首先,它是自上向下转移的,所以想要求得 dp[i][j] 的值,我们需要知道 dp[i - 1][j - 1] 和 dp[i - 1][j] 的值。因为按照“走向下个相邻两点”的规则,只有 (i - 1, j - 1) 和 (i - 1, j) 这两个点,才能能走到 (i, j),也就是我们讲到的转移到 (i, j) 点。右边的第二种状态定义转移过程和左边的一样,只是移动方向不一样而已。
所以,根据两种状态定义,我们可以分别列出这两种状态转移方程:
第一种状态转移方程:dp[i][j] = max(dp[i - 1][j - 1], dp[i - 1][j]) + val[i][j]
第二种状态转移方程:dp[i][j] = max(dp[i + 1][j], dp[i + 1][j + 1]) + val[i][j]
两种转移方程,都是在能够转移到 (i, j) 点的状态值中选择一个较大值,再加上 (i, j) 原本的数值 val[i][j],就是各自起始点到达 (i, j) 点的路径最大值,也就是两种状态定义下的 dp[i][j] 的值。
到这里,你可以看出,状态定义不一样,直接导致我们的状态转移方程就不一样。所以,虽然是相同的数学符号,定义的含义不同,就会造成后续的解法不同,同时也意味着解决问题的难度不同。
这也就是很多同学在一开始学习动态规划算法的时候,总喊着不明白状态转移方程,而我会告诉他们的是,你不是不明白状态转移方程,你是不明白状态定义。要解决一个动态规划问题,要从状态定义着手,要学习动态规划算法,也要从状态定义开始学起。
关于状态转移方程这里,我们再来讲一个转移方向的问题。根据数字三角形这个问题的两种状态转移方程,我们可知这代表了两种不同的状态转移方向:第一种是从第一层开始,计算出第二行的所有值,再计算出第三行所有值;而第二种状态转移方向与第一种正好相反。这里我们就要引出动态规划算法中一个最重要的概念“阶段”。
什么是“阶段”呢,可以这样说,状态转移就是从一个阶段转移到下一个阶段。像数字三角形问题中,在第一种转移方式中,起始点的第一层,就是整个转移的第一个阶段,第二层就是整个转移的第二个“阶段”,你会发现转移的时候,只有一个阶段计算完了,才能计算下一个阶段中的状态值。
而在第二种转移方式中,作为起始点的最后一层,才是我们转移的第一个阶段,然后依次由下向上转移,一个阶段接着下一个阶段。
弄清什么是阶段,对于接下来我们证明算法的正确性,有决定性作用。
3. 正确性证明
动态规划算法的第三步,就是证明你推导出的状态转移方程的正确性。关于状态转移方程的正确性证明,借助的就是之前学习中,我们提到过的程序设计中最重要的数学思维:数学归纳法。
根据数学归纳法的三步走,我们试着证明一下第一种状态转移方程是正确的,也就是自上而下的状态转移方式。
第一步,我们已知在这种状态转移方式中,第一个阶段中的所有 dp 值都可以轻松获得,也就是可以很轻松的初始化 dp[1][1] 的值,应该等于 val[1][1] 的值。
第二步,我们假设如果第 i-1 阶段中的所有状态值,我们都正确的得到了。也就是正确的得到了从起始点到 i-1 层中每个点的路径最大和值。那根据状态转移方程:dp[i][j] = max(dp[i - 1][j], dp[i - 1][j + 1]) + val[i][j] 来说,就可以正确的计算得到第 i 个阶段中的所有状态值。
第三步,两步联立,就可得出结论,所有阶段中的状态值计算均正确。那么,从起始点到底边的路径最大和值,就在最后一个阶段的若干个状态值中。
以上就是我们使用数学归纳法,证明数字三角形问题的第一种状态转移方程正确性的过程。这个过程呢,比较简单,那是因为数字三角形问题本身就不难。当面对更难一些的动态规划问题的时候,将这种证明方法,加入到你学习动态规划算法的过程中,你会收获奇效的。
4. 程序设计与实现
动态规划解题的最后一步,就是程序的设计与实现了。关于数字三角形问题的两种解题方法的代码实现,就作为今天给你留的课后作业题了。
在上一篇递推算法的作业题中,你应该体会到了,对于同样的递推公式,我们不仅可以用循环实现,还可以用递归实现。今天的这两种状态定义方法呢,我只要求你用循环的程序方式实现即可。
当然,我还希望,在你实现出了这两种状态定义方法的程序以后,可以从程序的角度,对两种方法加以评价,并在留言区说说它们的优点和缺点。
课程小结
至此,我们就说完了动态规划算法的完整解题步骤,关于今天的课程呢,希望你记住如下几点:
1. 状态定义,是动态规划算法的重点,无论是解题还是学习,都要从这一步开始。
2. 不同的状态定义,决定了不同的状态转移方程,同时也可能代表了不同的解题难度,所以,学习如何定义优秀的状态很重要。
3. 动态规划中的状态转移顺序,是建立在“阶段”概念之上的,只有本阶段的状态值计算完了,下一个阶段的状态值才能得以计算。
4. 数学归纳法,是证明动态规划状态转移方程正确性的利器,掌握了它,会让你的动态规划学习过程事半功倍!
好了,关于动态规划算法,今天我们就先讲到这里。下一期我们将会使用这两期文章中学习到的技巧,来学习一个稍微有点儿难度的动态规划问题,也算是对我们近期学习效果的一个验证。
![]()
动态规划算法是解决最优化问题的一种重要方法。本文通过介绍动态规划算法的设计步骤,从一个简单的数字三角形问题引入动态规划算法的概念。文章提出了动态规划算法的四个步骤:状态定义、状态转移方程、正确性证明以及程序设计与实现。状态定义是解决动态规划问题的关键,不同的状态定义会导致不同的状态转移方程,影响解题难度。文章通过数字三角形问题的两种状态定义展示了不同状态定义对后续求解过程的影响。状态转移方程是根据具体问题和状态定义进行具体分析得出的,并且需要通过数学归纳法证明其正确性。最后,文章强调了动态规划中的状态转移顺序建立在“阶段”概念之上,同时提到了程序设计与实现的重要性。总的来说,本文通过简单易懂的例子和清晰的步骤,帮助读者快速了解动态规划算法的设计方法,强调了状态定义的重要性以及正确性证明的必要性。















 966
966











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









