







FPN(Feature Pyramid Network)算法:
特征金字塔网络(FPN)是目标检测中生成金字塔形状特征表示的代表性模型架构之一。它采用通常为图像分类设计的骨干模型,然后通过自上而下和横向连接,并组合不同的特征层来构建特征金字塔。FPN 取代了检测器(如 Faster R-CNN)中的特征提取器,并生成更高质量的金字塔特征图【1】。
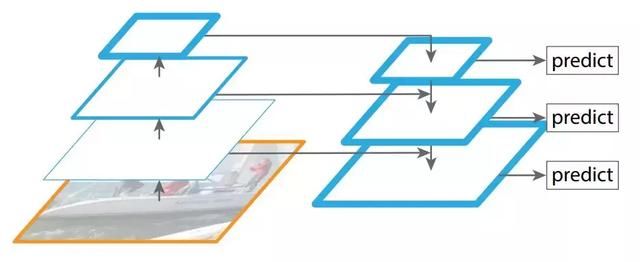
图注:特征金字塔网络,选自 arXiv: 1612.03144。
FPN 由自下而上和自上而下路径组成。其中自下而上的路径采用下采样,是用于提取特征的常用卷积网络,空间分辨率自下而上地下降。当空间分辨率下降,且检测到更高层的结构时,每层的语义值增加。
原来多数的object detection算法都是只采用顶层特征做预测,但我们知道低层的特征语义信息比较少,但是目标位置准确;高层的特征语义信息比较丰富,但是目标位置比较粗略。另外虽然也有些算法采用多尺度特征融合的方式,但是一般是采用融合后的特征做预测,而本文不一样的地方在于预测是在不同特征层独立进行的【2】。
同时利用低层特征高分辨率和高层特征的高语义信息,通过融合这些不同层的特征达到预测的效果。并且预测是在每个融合后的特征层上单独进行的,这和常规的特征融合方式不同。
【1】谷歌大脑提出NAS-FPN:一种学会自动架构搜索的特征金字塔网络:http://www.360kuai.com/pc/9f5779082a933626a?cota=4&sign=360_57c3bbd1&refer_scene=so_1
【2】FPN(feature pyramid networks)算法讲解:https://blog.csdn.net/u014380165/article/details/72890275
【3】FPN(特征图金字塔网络)理论基础与具体实现:https://blog.csdn.net/qq_17550379/article/details/80375874
RetinaNet:
paper:Focal Loss for Dense Object Detection
link:RetinaNet
该方法是一种对one stage系的改进。众所周知,detector主要分为以下两大门派:

这种鱼(speed)与熊掌(accuracy)不可兼得的局面一直成为Detection的瓶颈。
目前精度最高的目标检测器都是基于R-CNN结构衍生出来的two-stage目标检测方法,相反one-stage的探测器应用于目标可能位置的密集采样中,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 781
781











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









