







坐标系
在3d渲染管线中,渲染3d模型到2d显示器,必须经历四个主要的坐标系空间
模型坐标系
模型坐标系是相对于模型自身的坐标系,原点一般在模型中心点
世界坐标系
坐标原点在世界的原点
齐次坐标系
当4D坐标应用在3d空间中时,他们被称为齐次坐标系。第四个分量为W
当W = 0时,齐次坐标是3d向量
当W = 1时,齐次坐标是3d点
矩阵变换
矩阵变换就是矩阵用某种方式来影响向量或者点,使得我们可以将模型坐标系转化为世界坐标系
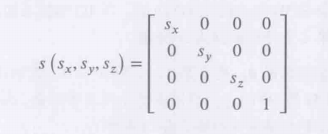
缩放矩阵:
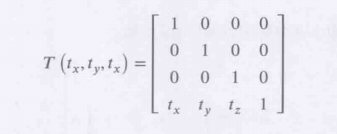
平移矩阵:
旋转矩阵:

摄像机坐标系
世界坐标系需要变换到 摄像机坐标系
摄像机变换矩阵:

屏幕坐标系
屏幕坐标系,把3D场景平铺到2D平面上得到的坐标系,可以通过正交投影和透视投影去转换
正交投影
投影结果无深度信息
正交投影矩阵:

透视投影
参数视场FOV:摄像机的可见角度。

总结:物体模型信息通过,旋转,平移,缩放矩阵转换到世界坐标系中,再通过摄像机矩阵转换到摄像机坐标系中,再通过投影矩阵转换到屏幕坐标系中
光照与颜色
RGBA颜色空间表示一个像素由一个4字节32位的数据存储。
顶点属性
纹理坐标:每个顶点上都有一个纹理坐标指定2D图片的某个部分与模型顶点的对应关系,常见的纹理坐标系是UV坐标系,纹理的X坐标称为U,Y坐标称为V
顶点法线:顶点处的法线
顶点法线的求法:
- 取所有包含这个顶点的三角面的法线均值
- 在当前顶点创建N个顶点,每个顶点的法线对应一个面的法线,其中N等于包含这个顶点的所有面的数量
光照
-
环境光
-
方向光
-
点光源
-
聚光灯
phong光照模型
用于计算光源如何作用于物体表面,是一种局部光照模型,不考虑二次反射
phong光照模型把光分为:
- 环境光
- 漫反射
- 高光
着色
- 平面着色 效果不好
- gouraud着色 废弃
- phong着色:计算三角片上每个像素的光照模型,针对每个像素进行单独计算的逐像素光照
可见性
深度缓冲区:存储每个像素距离摄像机的距离,如果渲染过程中,当前帧的深度小于上一次记录的深度,那么这个像素就会进行重绘,并记录新的深度
为了避免重绘浪费,先进行深度pass进行剔除,把哪些在某一帧看不到的对象剔除掉。
通过一个物体的初始朝向和最终朝向,可以计算出旋转轴和旋转角度,旋转轴通过俩向量叉乘得到,旋转调度可以通过点乘得到。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









