






J1850-VPW
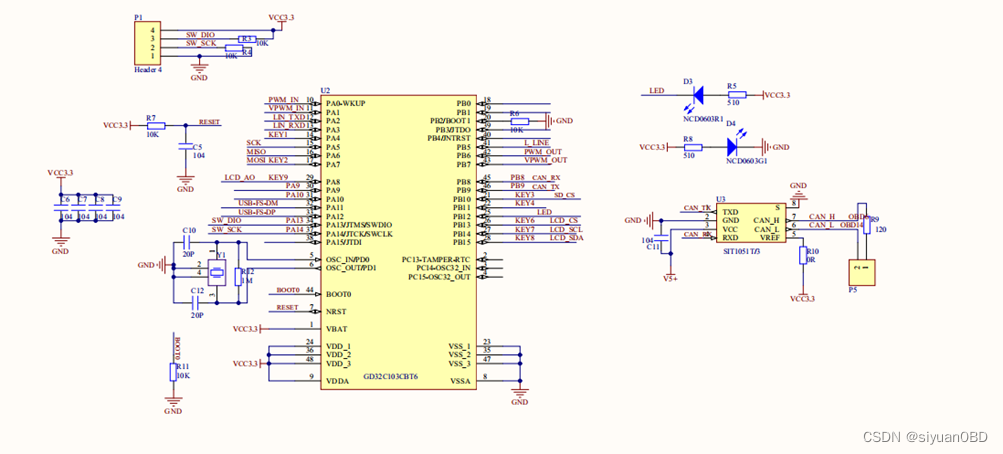
硬件说明:
MCU: GD32C103 120M,128K,32k RAM.
输入:USB 5V.
OBD功能口定义:OBD(2,10)VPWM、OBD 7(K线)、OBD 6(CAN H)、OBD 14(CAN L)、OBD 15(L线).
软件说明:
一、汽车CAN2.0(双线OBD 6、14)
1、支持波特率:1M、800K、500K、250K、125K、100K、62K、50K、33.3K、25K
二、汽车CAN FD(双线OBD 6、14)
1、仲裁区波特率:1M、500K
2、数据区波特率5M 4M 2M 1M
三、汽车KWP/LIN(OBD 7)总线数据采集说明
1、波特率:5、4800、9600、10416、57600、115200 BPS
三、SAE J1850(OBD 2、10)
1、PWM 协议发送接收
2、VPW 协议发送接收
J1850-VPW
-
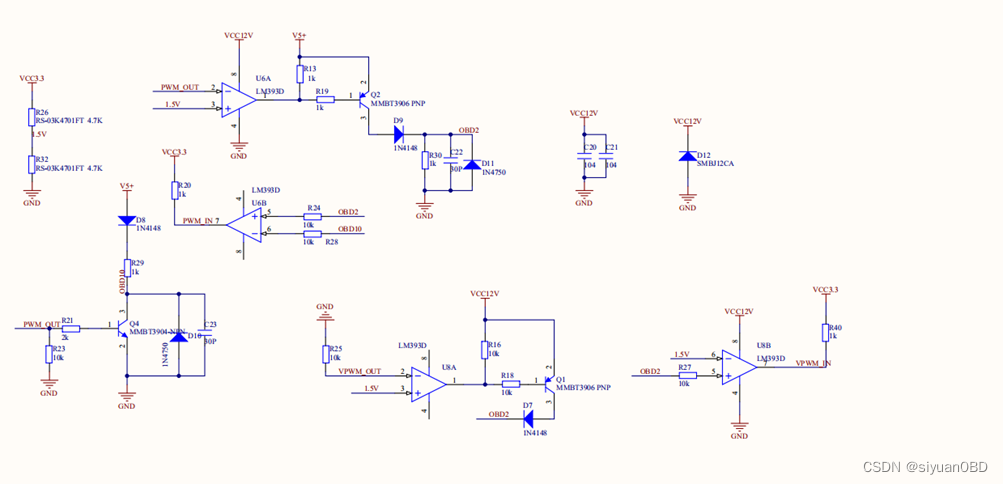
电路图
-
例程说明
VPW物理特性
采用10.4KB/S的波特率;通讯电平通常为7.5V;每个字节采用8位二进制数形式,没有起始位、停止位和校验位;通讯引脚为J1850 BUS+,即为OBD-2PIN。
电平接口
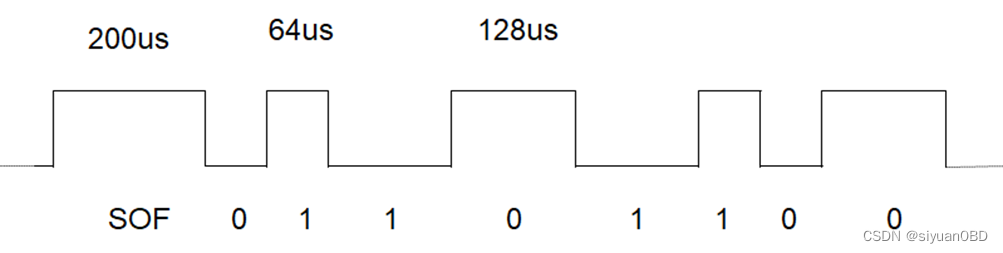
VPW协议初始电平为0V,在第1帧数据前有一个163至239微秒(us)的高电平表示SOF(帧头即数据开始标志),
接下来以不同长短的高低电平表示二进制数据0或1,其中:
高电平宽度介于34-96us表示“1”,高电平宽度介于96-163us表示“0”,
低电平宽度介于34-96us表示“0”,低电平宽度介于96-163us表示“1”,
传输时按字节顺序,且每个字节都是高位在前,低位在后的顺序,高低电平相间用于表示传输的数据,
字节与字节之间没有间隔,传送完一帧数据之后有一个宽度大于239us的低电平表示EOF(帧尾即帧结束标志)
详细如下图
-
软件设计
(1) main主要流程
//J1850VPW_Init();//vpw 初始化
//J1850_VPW_SendFrame(dat,sizeof(dat)); //发送VPW 命令
J1850VPW_Init();//vpw 初始化
uint8_t dat[]={0x68,0x6A,0xF1,0x01,0x00,0x17};
uint8_t dat1[]={0x68,0x6A,0xF1,0x01,0x01,0x18};
//uint8_t rxdat[10] = {0};
/* main loop */
while (1)
{J1850_VPW_SendFrame(dat,sizeof(dat));//发送一帧VPW 命令 Delay_ms(500); J1850_VPW_SendFrame(dat1,sizeof(dat1));//发送一帧VPW 命令 Delay_ms(500);
}
(2)Vpwm.c 主要函数说明
1 VPW 初始化J1850VPW_Init
//VPW_IN PA1 TIMER1_CH1 输入
//PB7 OUT PWM方式
void J1850VPW_Init(void)
{
rcu_periph_clock_enable(RCU_TIMER3);
rcu_periph_clock_enable(RCU_GPIOB);
rcu_periph_clock_enable(RCU_AF);
gpio_init(GPIOB, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_7);
gpio_init(GPIOB, GPIO_MODE_IPD, GPIO_OSPEED_50MHZ, GPIO_PIN_6);//PWM 引脚设置成输入 避免影响
//gpio_bit_reset(GPIOB,GPIO_PIN_6);//0输出
TIM1_CH1_Cap_Init();//输入捕获的方式 获取VPW 数据
}
2 VPW数据转换为电平宽度DatToVPW
uint8_t DatToVPW( VPWM_DATA *vdat, uint8_t *buf, uint8_t len )
{
uint8_t i, j;
uint8_t state = true;//HIGH
uint16_t time = 200;//200;//SOF198;// 帧头
uint16_t time1;
vdat->Num = 0;
for( i = 0; i < len; i++ )
{
for( j = 0; j < 8; j++ )
{
if( (buf[i]>>(7-j))&0x1)
{
//HIGH
time1 = (state)?128:64;
}
else
{
//LOW
time1 = (state)?64:128;
}
state = !state;
if( !state )//每次都设置2个电平 所以要这样操作
{
//VPW 协议是一个电平翻转一个BIT
ToPWM( vdat, time, time1 ); //time=上升沿 ,time1=下降沿
}
time = time1;
}
}
if( !state )
{
return false;
}
time1 = 160;//EOF
ToPWM( vdat, time, time1 );
return true;
}
3 VPW 发送发送命令J1850_VPWM_SendAndGet
//------------------------------------------------------------------------------
// Funtion: VPW PWM 脉宽输出
// Input : vpwm 硬件对象
// vdat 脉冲时间及占空比数据
// Output : none
// Return : none
// Info : none
//------------------------------------------------------------------------------
u16 J1850_VPWM_SendAndGet(VPWM_DATA *vdat )
{
uint16_t iRet=0;
if( vdat->Num == 0 )
{
return 0;
}
vdat->Index = 0;
//vdat->State=VPWM_OUTPUT;
uint16_t Period = vdat->Period[vdat->Index];
uint16_t CCR_Val = vdat->Duty[vdat->Index];
vdat->Index++;
timer_oc_parameter_struct timer_ocinitpara;
timer_parameter_struct timer_initpara;
timer_deinit(TIMER3);
/* initialize TIMER init parameter struct */
timer_struct_para_init(&timer_initpara);
/* initialize TIMER channel output parameter struct */
timer_channel_output_struct_para_init(&timer_ocinitpara);
/* CH0, CH1 and CH2 configuration in PWM mode */
timer_ocinitpara.outputstate = TIMER_CCX_ENABLE;//是否使能输出
timer_ocinitpara.outputnstate = TIMER_CCXN_DISABLE;//
timer_ocinitpara.ocpolarity = TIMER_OC_POLARITY_HIGH;//输出极性
timer_ocinitpara.ocnpolarity = TIMER_OCN_POLARITY_HIGH;//输出死区延时的极性
timer_ocinitpara.ocidlestate = TIMER_OC_IDLE_STATE_LOW;//空闲状态 输出极性
timer_ocinitpara.ocnidlestate = TIMER_OCN_IDLE_STATE_LOW;//空闲状态 互补输出极性
timer_channel_output_config(TIMER3, TIMER_CH_1, &timer_ocinitpara);
/* TIMER1 configuration */
timer_initpara.period = Period;//周期
timer_initpara.prescaler = 120-1;//1us 精度
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_initpara.repetitioncounter = 0;
timer_init(TIMER3, &timer_initpara);
/* CH2 configuration in PWM mode0, duty cycle 75% */
timer_channel_output_pulse_value_config(TIMER3, TIMER_CH_1, CCR_Val);//占空比 即高电平时间
//timer_channel_output_mode_config(TIMER3, TIMER_CH_1, TIMER_OC_MODE_PWM0);
timer_channel_output_shadow_config(TIMER3, TIMER_CH_1, TIMER_OC_SHADOW_ENABLE);//必须 ENABLE
/* auto-reload preload enable */
timer_auto_reload_shadow_enable(TIMER3);
//必须接收关闭中断
//timer_interrupt_disable(TIMER1,TIMER_INT_CH1|TIMER_INT_UP); //TIME1 接收中断关闭
timer_disable(TIMER1);//必须关闭接收
timer_channel_output_mode_config(TIMER3, TIMER_CH_1, TIMER_OC_MODE_PWM0);
/* auto-reload preload enable */
timer_enable(TIMER3);
timer_flag_clear(TIMER3, TIMER_FLAG_CH1);//清标志
while(vdat->State!=VPWM_IDLE)
{
//if( TIM_GetFlagStatus(vpwm->TxPPin.Tim,vpwm->TxPPin.TimFlagCc) == RESET )
if(RESET == timer_flag_get(TIMER3, TIMER_FLAG_CH1)) //TIMER_INT_FLAG_CH1 TIMER_FLAG_CH1
{
//TIM_IT_CC3
continue;
}
timer_flag_clear(TIMER3, TIMER_FLAG_CH1);//清标志
//TIM_ClearFlag(vpwm->TxPPin.Tim,vpwm->TxPPin.TimFlagCc);
if( !VPWM_Update(vdat) )//更新占空比
{
timer_disable(TIMER3);//
// gpio_init(GPIOB, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ,GPIO_PIN_7);
// gpio_bit_reset(GPIOB,GPIO_PIN_7);
vdat->State = VPWM_IDLE;
}
}
//等待接收
//必须接收关闭中断
iJ1850EofFlag=0;
iReCount=0;//
//timer_interrupt_enable(TIMER1,TIMER_INT_CH1|TIMER_INT_UP);
timer_enable(TIMER1);//开启接收
GetTimer6Cnt();
return iRet;
}
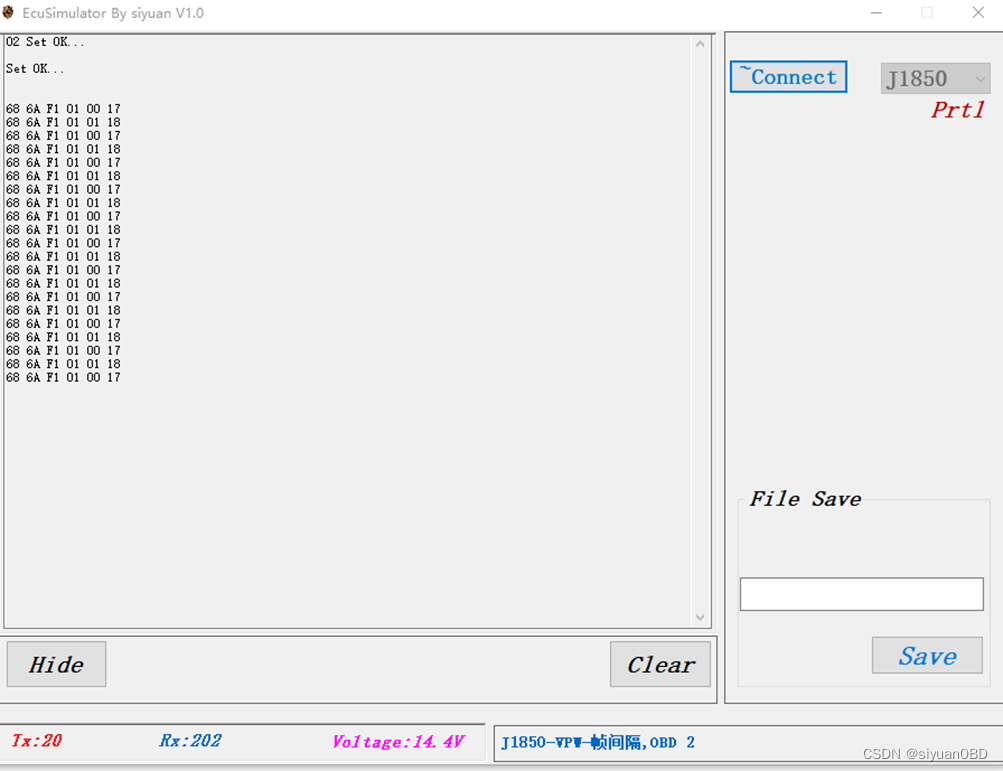
4. PC 平台效果
EcuSimulator 工具设置J1850 VPW,显示数据如下图所示

















 741
741

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









