







 本文详细介绍了Modbus通信的三种模式:RTU、ASCII和TCP。RTU模式使用CRC校验,ASCII模式使用LRC校验,TCP模式基于以太网和TCP/IP。RTU模式数据帧包括地址码、功能码、数据和校验码,ASCII模式增加了字符起始和结束标志,TCP模式则包含MBAP和PDU两部分。同时,文中列举了各种模式下的数据帧格式和功能码示例,以及错误应答的处理方式。
本文详细介绍了Modbus通信的三种模式:RTU、ASCII和TCP。RTU模式使用CRC校验,ASCII模式使用LRC校验,TCP模式基于以太网和TCP/IP。RTU模式数据帧包括地址码、功能码、数据和校验码,ASCII模式增加了字符起始和结束标志,TCP模式则包含MBAP和PDU两部分。同时,文中列举了各种模式下的数据帧格式和功能码示例,以及错误应答的处理方式。
MODBUS通信模式最主要有三种:
RTU模式,ASCII模式和TCP模式。Modbus TCP基于以太网和TCP/IP协议,Modbus RTU和Modbus ASCII则是使用异步串行传输(通常是RS-232/422/485)。
RTU模式:
地址码 功能码 数据 校验码 一字节 一字节 n字节 两字节(CRC) 从机都有相应的地址码,便于主机识别,从机地址为0到255,0为广播地址,248-255保留。总线上只能有一个主设备,但可以有一个或者多个(最多247个 ip地址1-247)从设备。
广播模式:主设备向所有的从设备发送请求指令,从设备收到指令后,各自处理,不要求返回应答;这种模式下,请求指令必须是Modbus标准功能中的写指令;比如 0x06,0x10 功能码
其中数据已帧为单位进行数据传输,每帧最长为252字节,最短为0。如果一byte数据的传输时间为T,那么每两帧之间的间隔最小应该要大于3.5T,否则从机不能分辨这是两帧。第二,同一帧连续的两个数据之间的间隔时间不能超过1.5T,否则节点会认为这一帧数据不完整,这说明我们在modbus传输的时候要使能一个定时器的工作。
例子:
发送:09 03 00 04 00 03 XX
主站告诉从站09,我要读取的地址偏移为4、5、6的Holding Register的数值。其中"03"是读Holding Register的功能码,"00 04 00 03"是数据区,"00 04"是寄存器的地址,"00 03"说明要连续读三个寄存器的值。"XX"代表最后的校验位。
接收:09 03 06 02 2B 00 01 00 64 XX
从站回应该地址偏移为4的寄存器值为02 2B,地址偏移为5的寄存器值为00 01,地址偏移为6的寄存器值为00 64。其中"09 03"是复制了主站发来的地址和功能码,"06"代表接下来的数据共有6个字节。
ASCII模式:
起始 地址码 功能码 数据 校验 回车换行 字符 ':'(冒号) 两字节 两字节 0到2 * 252字节 两字节(LRC校验) 两字节(CR,LF) 帧的起始一字符 ' : '冒号开始,结束为回车换行,其对应的16进制可以到ASCII表中进行查询。字节间传输的间隔时间不能大于1s,大于1s认为这一帧数据丢失.同样我们可以计算出来ASCII帧的最大长度是513字节。
RTU使用CRC校验,ASCII使用LRC校验。
TCP模式:
ModbusTCP的数据帧可分为两部分:MBAP+PDU。
主站为client端,主动建立连接;从站为server端,等待连接。
1.报文头MBAP
MBAP为报文头,长度为7字节,组成如下:
事务处理标识 协议标识 长度 单元标识符 2字节 2字节 2字节 1字节 事务处理标识 :可以理解为报文的序列号,一般每次通信之后就要加1以区别不同的通信数据报文。
协议标识符 :00 00表示ModbusTCP协议。
长度 :表示接下来的数据长度,单位为字节。
单元标识符 :可以理解为设备地址。PDU由功能码+数据组成。功能码为1字节,数据长度不定,由具体功能决定。
例子:
发送:01 c8 00 00 00 06 01 03 00 14 00 0a
序列号:01 c8 ,协议标识符:00 00 ,长度:00 06 ,单元标识符/服务器地址:01,功能码:03,寄存器地址:00 14 ,读取几位数据:00 0a。
接收:01 c8 00 00 00 17 01 03 14 00 00 00 00 00 00 00 00 00 00 00 01 00 00 00 00 00 03 00 00
序列号:01 c8 ,协议标识符:00 00 ,长度:00 17 ,单元标识符/服务器地址:01 ,功能码:03,数据长度:14 ,数据:就是后面的在第6位和第9位有数据。
下一条数据序,列号就会加一,变为01 c9。
读:
MSB表示高字节;LSB表示低字节。
寄存器数据低地址数据放在前面,高地址数据放在后面
主节点发送帧格式:
序号
0
1
2
3
4
5
6
7
字段定义
ADDR
CMD
MSB
LSB
MSB
LSB
LSB
MSB
解释
从机地址
命令类型
寄存器起始地址
寄存器个数n
CRC校验
从节点正常应答帧格式:
序号
0
1
2
3
4
5
6
…
L+1
L+2
L+3
L+4
字段定义
ADDR
CMD
Length
MSB
LSB
MSB
LSB
…
MSB
LSB
LSB
MSB
解释
从机地址
命令类型
发送字节数L=n*2
第一个寄存器的值
第二个寄存器的值
…
最后一个寄存器的值
CRC校验
写单个寄存器:
主节点发送帧格式:
序号
0
1
2
3
4
5
6
7
字段定义
ADDR
CMD
MSB
LSB
MSB
LSB
LSB
MSB
解释
从机地址
命令类型
寄存器地址
数据
CRC校验
从节点正常应答帧格式:
序号
0
1
2
3
4
5
6
7
字段定义
ADDR
CMD
MSB
LSB
MSB
LSB
LSB
MSB
解释
从机地址
命令类型
寄存器地址
数据
CRC校验
正确的应答格式:
地址码 功能码 数据码 校验 从机自己的 与发送的保持一致(范围:0x00-0x7f) 根据功能需求 校验码
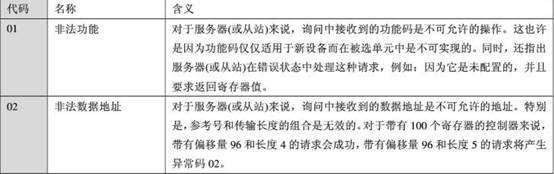
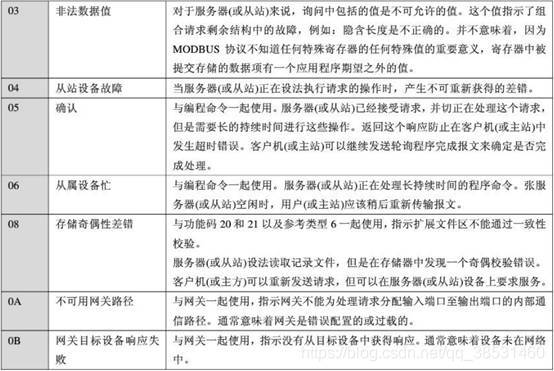
错误应答:
功能码加0x80,原本功能码最高位不会为1,加0x80最高位为1,判断出错,数据位的异常码可以知道大概是什么错误。
地址码 功能码 数据码 校验 从机自己的 与发送的保持一致(范围:0x00-0x7f) + 0x80 异常码 校验码
异常码:
功能码:
0x01: 读线圈寄存器(可读可写线圈)
0x02: 读离散输入寄存器(可读不可写线圈)
0x03: 读保持寄存器(可读可写寄存器)
0x04: 读输入寄存器(可读不可写寄存器)
0x05: 写单个线圈寄存器(可写单个线圈不可读)
0x06: 写单个保持寄存器(可写单个寄存器不可读)
0x0f: 写多个线圈寄存器(可写多个线圈不可读)
0x10: 写多个保持寄存器(可写多个寄存器不可读)
01H-->读线圈寄存器
地址码 功能码 数据 校验 发送 01 01 00 20 00 05 FD C3 响应 01 01 01 15 90 47 发送数据:读取地址:00 20,从0x20处开始读取,00 05 读取5个寄存器。
响应数据:01,只有5个寄存器,小于8,5/8=0,加1,所以为1,假设有9个,则为02,以此类推。15,二进制:00010101,在5个寄存器中有3个处于开的状态。
02H--->读离散输入寄存器
地址码 功能码 数据 校验 发送 01 02 00 20 00 05 B9 C3 响应 01 02 01 02 20 49 发送数据:读取地址:00 20,从0x20处开始读取,00 05 读取5个寄存器。
响应数据:01,只有5个寄存器,小于8,5/8=0,加1,所以为1,假设有9个,则为02,以此类推。02,二进制:00000010,在5个寄存器中有1个处于开的状态,在此功能下只能读取从机状态。
03-->读保持寄存器
地址码 功能码 数据 校验 发送 01 03 00 14 00 03 45 CF 响应 01 03 06 00 14 00 1E 00 00 71 70 发送数据:读取地址:00 14,从0x14处开始读取3个寄存器。
响应数据:06,后面有6位,00 14,发送的数据0x14,00 1E发送的数据0x1E,00 00发送的数据0X00。
04--> 读输入寄存器
地址码 功能码 数据 校验 发送 01 04 00 14 00 03 F0 0F 响应 01 04 06 00 14 00 1E 00 00 30 96 发送数据:读取地址:00 14,从0x14处开始读取,00 03 读取3个寄存器。
响应数据:06,后面有6位,00 14,发送的数据0x14,00 1E发送的数据0x1E,00 00发送的数据0X00,在此功能下只能读取从机状态。
05-->写单个线圈寄存器
地址码 功能码 数据 校验 发送 01 05 00 20 00 00 CC 00 响应 01 05 00 20 00 00 CC 00 发送数据:读取地址:00 20,从0x20处开始写入,00 00 写入值。
响应数据:跟发送的一样。
06-->写单个保持寄存器
地址码 功能码 数据 校验 发送 01 06 00 01 00 03 XX XX 响应 01 06 00 01 00 03 XX XX 发送数据:读取地址:00 01,从0x01处开始写入,00 03 写入值。
响应数据:跟发送的一样。
0F-->写多个线圈寄存器
地址码 功能码 数据 校验 发送 01 0F 00 14 00 03 01 00 CC 00 响应 01 0F 00 14 00 03 CC 00 发送数据:读取地址:00 14,从0x14处开始写入,00 03 写入3个值, 3小于8,所以为01, 00,写入的3个数据都为0。
响应数据:00 14,写入地址,00 03,3个数据。
10-->写多个保持寄存器
地址码 功能码 数据 校验 发送 01 10 00 34 00 02 04 0C 02 12 45 XX XX 响应 01 10 00 34 00 02 XX XX 发送数据:读取地址:00 34,从0x34处开始写入,00 02 写入2个值,04后面有4位,0C 02和12 45都为数据。
响应数据:00 14,写入地址,00 02,2个数据。
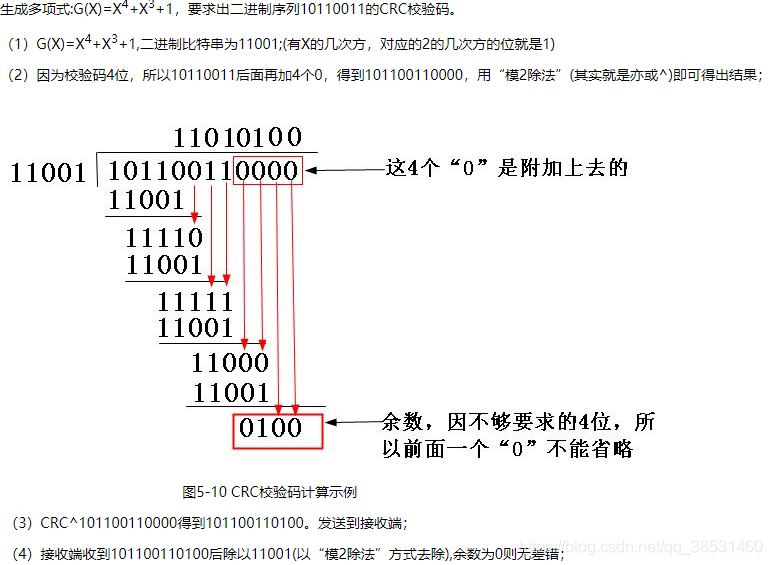
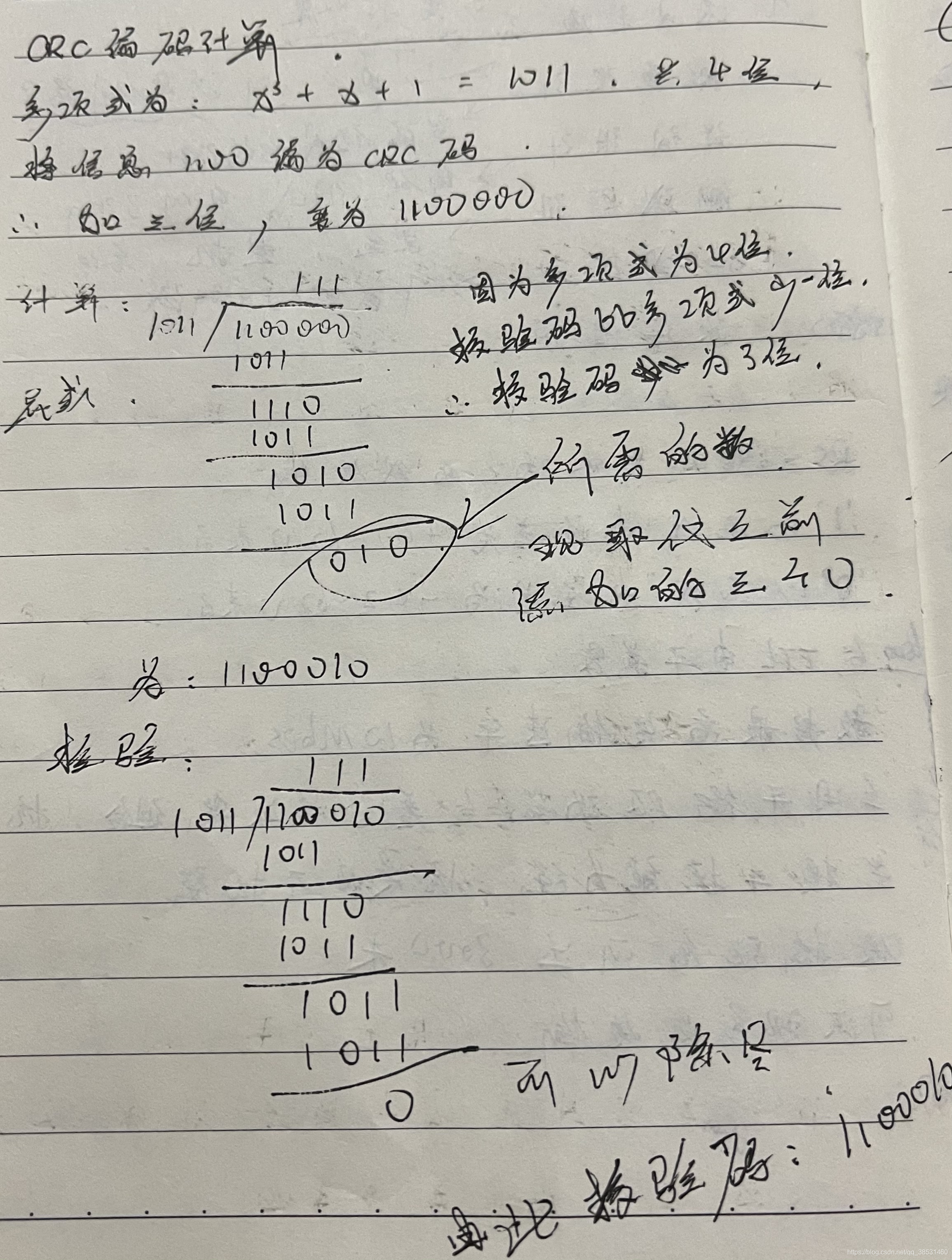
CRC校验:
校验码是4位是因为多项式为5位,校验码少一位。



















 1728
1728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











