







引入包
from scipy.optimize import minimize
from numpy import *
import numpy
import numpy as np
import scipy
求解 B p = − g Bp=-g Bp=−g
def newton_point(g,B):
cho_info = scipy.linalg.cho_factor(B)
newton_point = -scipy.linalg.cho_solve(cho_info, g)
return newton_point ## 标题
定义凸优化问题:
def f(x):
return 0.5*np.dot(np.dot(x,A),x)+np.dot(b,x)+c
def g(x):
return np.dot(A,x)+b
def minimize_bfgs(f, x0, jac=None,gtol=1e-5,disp=False):
DFP 算法实现:
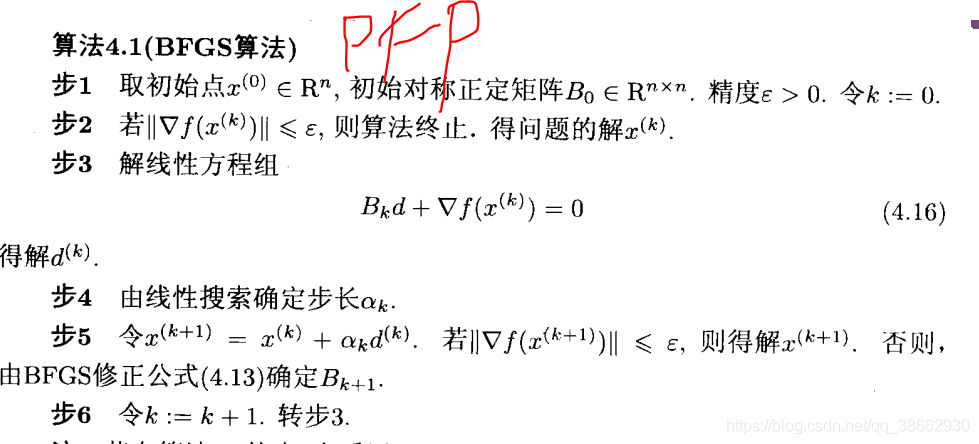
# 第一步,给出初始点x0, Ho, 计算go
gfk = g(x0)
k = 0
N = len(x0)
I = numpy.eye(N, dtype=int)
Bk = I
# 初始化Hessian 矩阵
xk = x0
# 初始时方向为最速下降方向
gnorm = numpy.amax(numpy.abs(gfk))
while (gnorm > gtol):
# 第二步 : 求下降方向
# pk = -numpy.dot(Hk, gfk)
pk=newton_point(gfk,Bk)
# 第三步: 这里使用了精确线搜索确定步长,并更新xk+1
alpha_k = -np.dot(pk.T, g(xk))/np.dot(pk.T,np.dot(A,pk))
xkp1 = xk + alpha_k * pk
# 第四步: 校正Bk
sk = xkp1 - xk
xk = xkp1
gfkp1 = g(xkp1)
yk = gfkp1 - gfk
gfk = gfkp1
k += 1
gnorm = numpy.amax(numpy.abs(gfk))
if (gnorm <= gtol):
break
rhok = 1.0 / (numpy.dot(yk, sk))
A1= I - yk[:, None] *sk[None, :] * rhok
A2 = I - sk[:, None] * yk[None, :] * rhok
Bk = np.dot(np.dot(A1, Bk),A2 ) + rhok * sk[:,None]*sk[None,:]
print(" Current function value xk:[%f %f]"% (xk[0],xk[1]))
print(" Current function value: %f" % f(xk))
print("BK",Bk)

测试
f __name__ == '__main__':
# x0 = [2, 1]
# A=np.array([[4,1],[2,5]])
# b=[-1,2]
# c=0
# g0=g(x0)
print(minimize_bfgs(f, x0, jac=g,gtol=1e-6, disp= True))
res = minimize(f, x0, method='BFGS', jac=g, options={'gtol': 1e-6, 'disp': True})
print(res)














 658
658











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









