









拟牛顿法过程如下: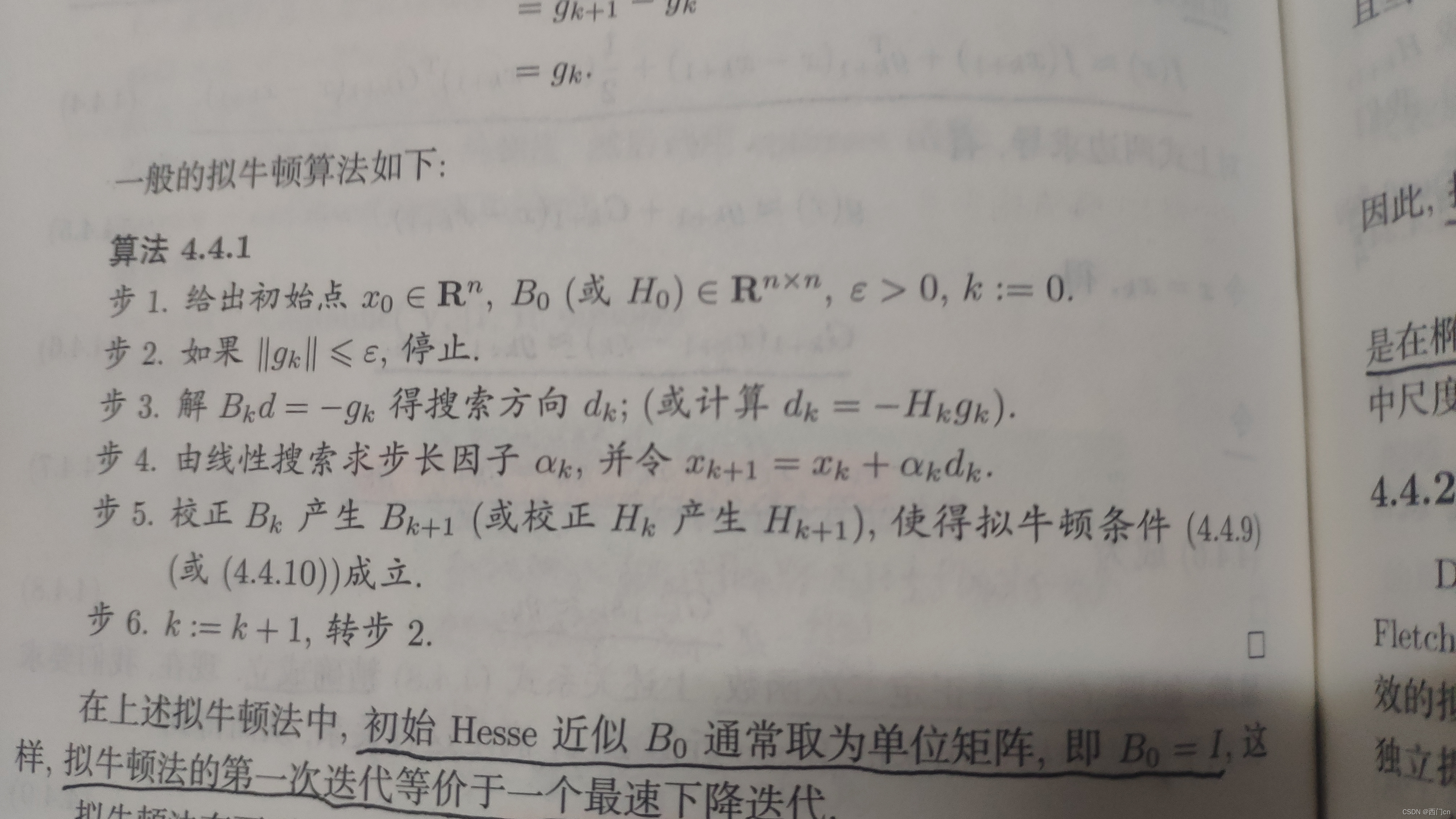
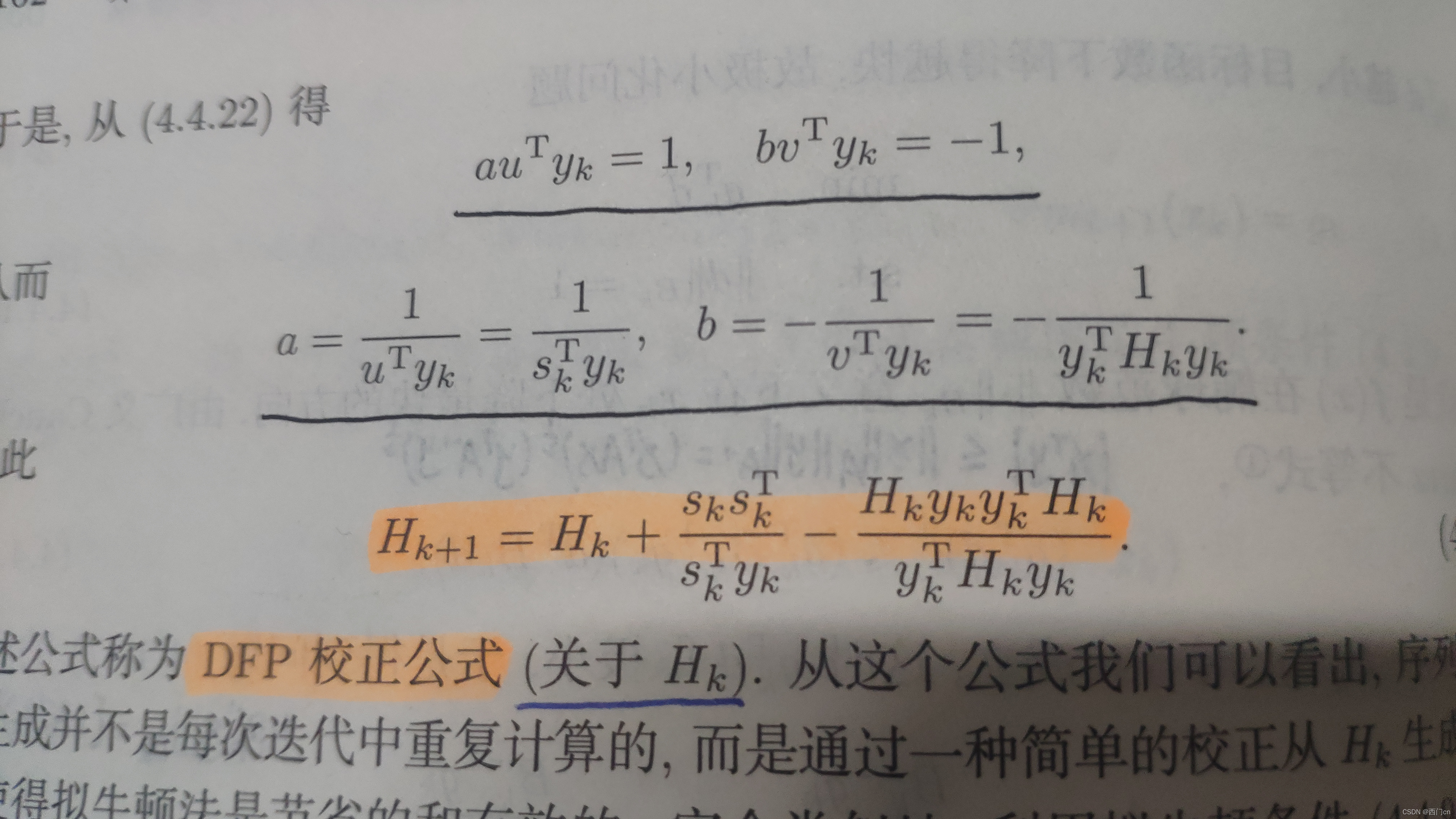
DFP修正公式:
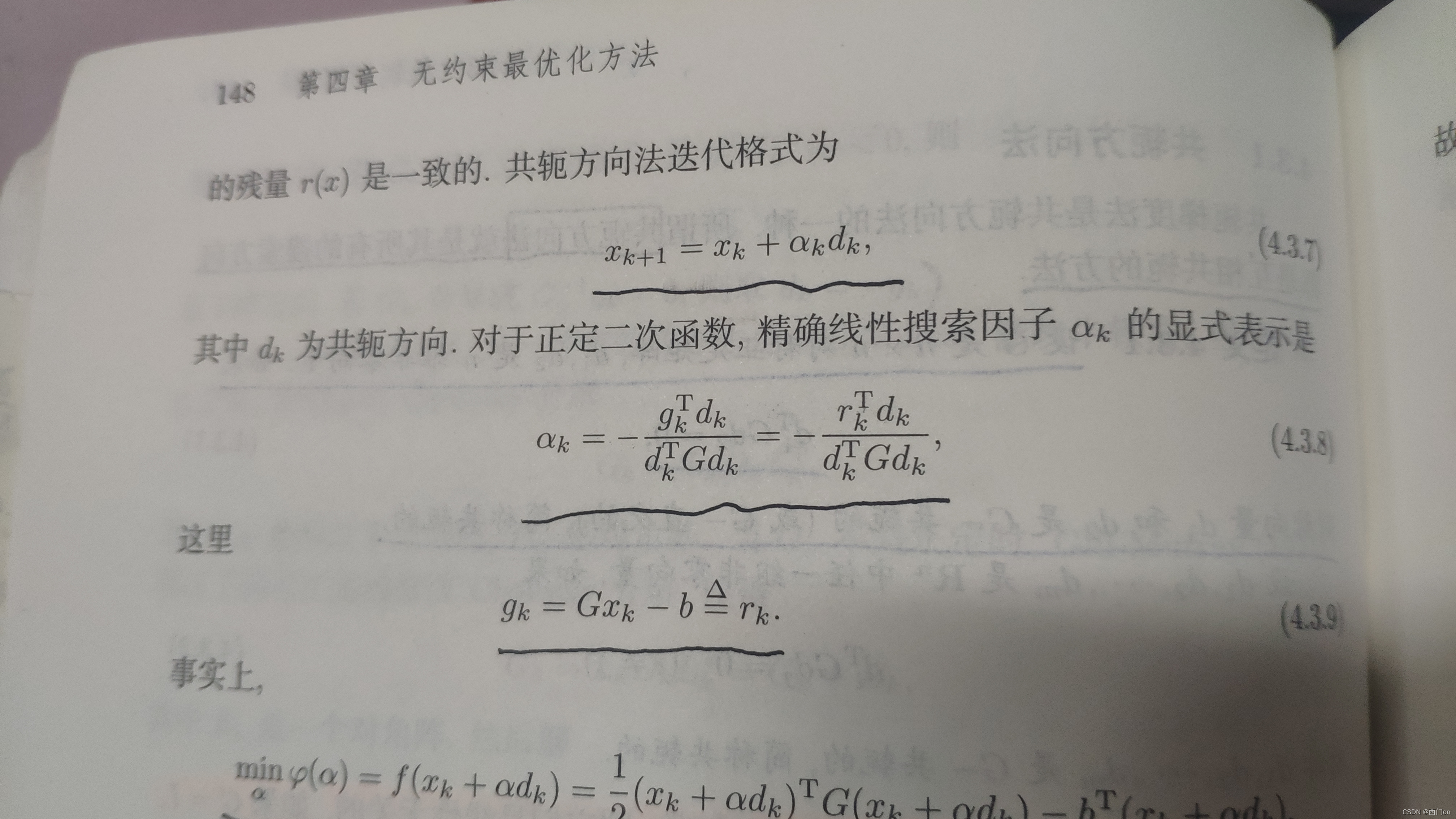
步长a根据线性搜索得出,也可以根据公式得出,证明如下:
代码如下:
import numpy as np
import sympy as sp
def jacobian(f,x):#雅可比矩阵,求一阶导数
a,b=np.shape(x)#判断变量维度
x1,x2=sp.symbols('x1 x2')#定义变量,如果多元的定义多元的
x3=[x1,x2]#将1变量放入列表中,方便查找和循环。有几个变量放几个
df=np.array([[0.00000],[0.00000]])#定义一个空矩阵,将雅可比矩阵的值放入,保留多少位小数,小数点后面就有几个0。n元变量就加n个[]
for i in range(a):#循环求值
df[i,0]=sp.diff(f,x3[i]).subs({x1:x[0][0],x2:x[1][0]})#求导和求值,n元的在subs后面补充
return df
def hesse(f,x):#hesse矩阵
a,b=np.shape(x)
x1,x2=sp.symbols('x1 x2')
x3=[x1,x2]
G=np.zeros((a,a))
for i in range(a):
for j in range(a):
G[i,j]=sp.diff(f,x3[i],x3[j]).subs({x1:x[0][0],x2:x[1][0]})#n元的在subs后面补充
return G
def dfp_newton(f, x, iters):
"""
实现DFP拟牛顿算法
:param f: 原函数
:param x: 初始值
:param iters: 遍历的最大迭代次数
:return: 最终更新完毕的x值
"""
a = 1#定义初始步长
H = np.eye(2) # 初始化正定矩阵
G=hesse(f,x)#初始化Hesse矩阵
epsilon = 1e-3 # 一阶导g的第二范式的最小值(阈值)
for i in range(1, iters):
g = jacobian(f, x)
if np.linalg.norm(g) < epsilon:
xbest=[]
for a in x:
xbest.append(round(a[0]))#将结果从矩阵中输出放到列表中并四舍五入
break
#下面的迭代公式
d= -np.dot(H,g)
a=-(np.dot(g.T,d)/np.dot(d.T,np.dot(G,d)))
# 更新x值
x_new = x +a*d
print("第 %d 次结果"%i)
print(x_new)
g_new = jacobian(f, x_new)
y = g_new - g
s = x_new - x
#更新H
H=H+np.dot(s,s.T)/np.dot(s.T,y)-np.dot(H,np.dot(y,np.dot(y.T,H)))/np.dot(y.T,np.dot(H,y))
#更新G
G=hesse(f,x_new)
x = x_new
return xbest
x1,x2=sp.symbols('x1 x2')#例子
x=np.array([[2],[1]])
f=2*x1**2+x2**2-4*x1+2
print(dfp_newton(f,x,20)) 此代码可以求多元函数的DFP算法。运行结果如下: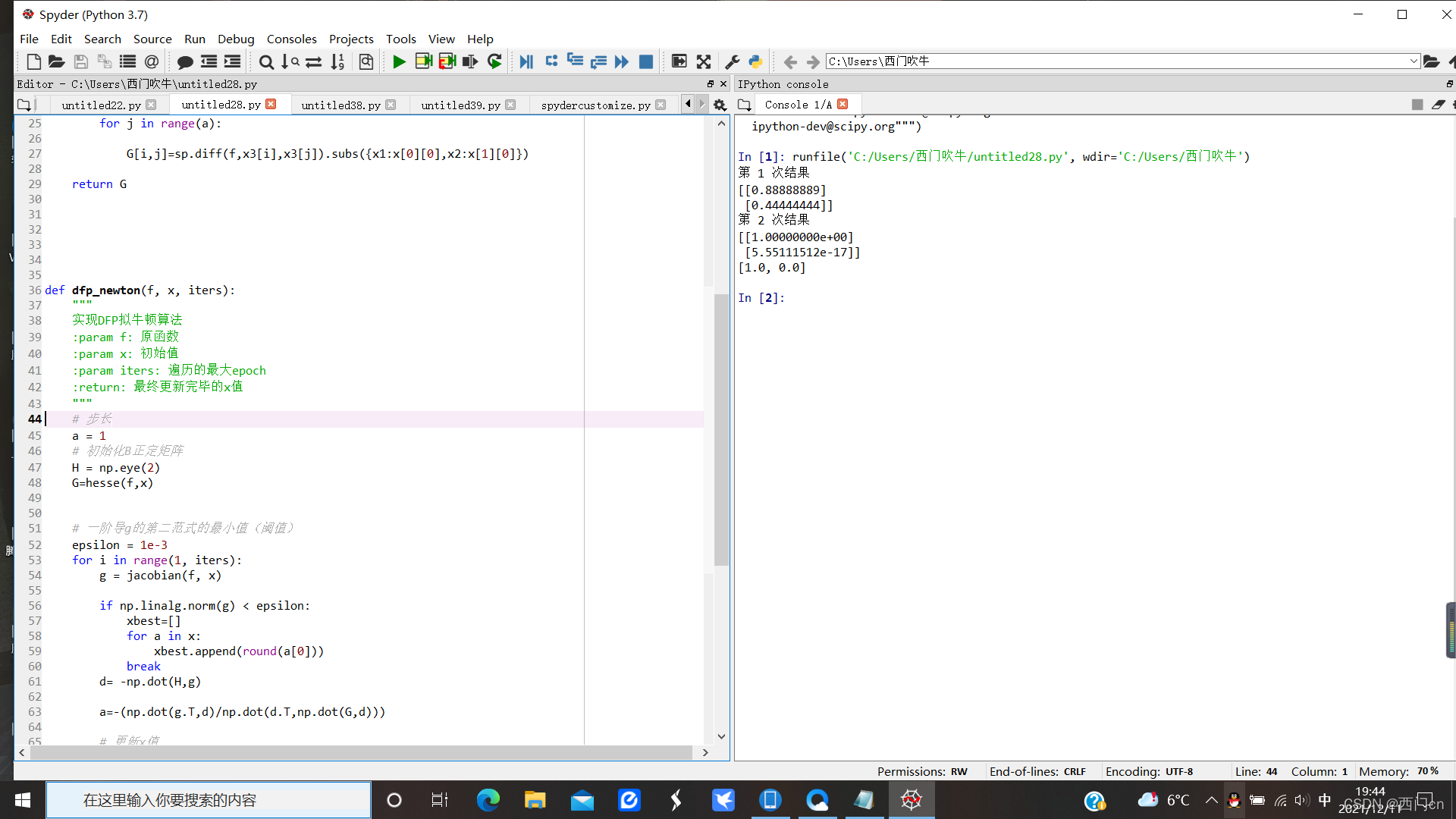


















 498
498

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











