







PID控制算法原理
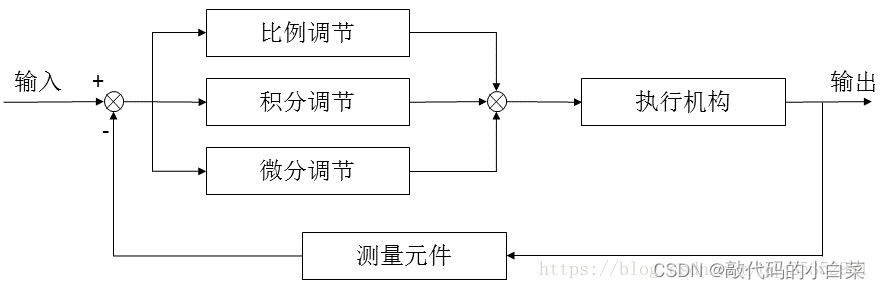
PID作为闭环控制单元实现了三个目的:
P(比例)是实现当前误差闭环控制
I(积分)是实现过去一段时间Tn内的累积误差控制
D(微分)则是对未来某个时间段Tv内的预测累积误差控制
所以PID三个增益参数都是对时间状态的预测,比例是现在,积分是过去,微分是未来。
啥是PID? PID可以吃吗?
PID,就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种很常见的控制算法。算法是不可以吃的。
到LZ发帖的这一天,PID已经有105年的历史了
它并不是什么很神圣的东西,大家一定都见过PID的实际应用
——比如四轴飞行器,再比如平衡小车……还有汽车的定速巡航、3D打印机上的温度控制器….
再比如动物园里的海狮,将一根杆子直立着顶在头上(OOPS,这个也算…)
就是类似于这种:需要将某一个物理量“保持稳定”的场合(比如维持平衡,稳定温度、转速等),PID都会派上大用场。
那么问题来了:
比如,我想控制一个“热得快”,让一锅水的温度保持在50℃
这么简单的任务,为啥要用到微积分的理论呢你一定在想:
这不是so easy嘛~ 小于50度就让它加热&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 4992
4992











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









