







| 课程名称: | 机器人技术 |
|---|---|
| 设计题目: | 六自由度机械臂正逆运动演示 |
| 任课教师: | |
| 小组成员: | |
20xx年 月 日
目录
- 机器人选择与建模
1.1机器人介绍
本次课程设计选择得是6-DOF机械臂。
为了方便进行逆运动学求解,我们在机械臂末端添加了两个伪连杆,让机械臂末端更方便调整角度,这样,在逆运动学求解时就不用考虑机械臂末端的角度,只用输入末端的位置就可以完成求解。
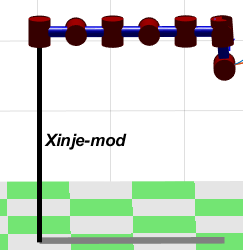
这是我们选择的机器人模型,其关节转向纵横交错,能够比较灵活的伸到他的长度能够抵达的地方。
1.2 机器人建模
连杆长度 :2个相邻关节轴线之间的距离
连杆扭角 :2个相邻关节轴线之间的角度
连杆偏距 :2个关节坐标系的X轴之间的距离
关节角度 :关节变量 计算时需要加初始角度偏移
按D-H参数对机械臂进行建模如下:
关节 关节转角 连杆偏移 连杆长度 连杆扭角
1 0 0 1 -pi/2
2 0 0 1 -pi/2
3 0 0 1 -pi/2
4 0 0 1 -pi/2
5 0 0 1 -pi/2
6 0 0 0 -pi/2
7 0 1 0 pi/2
8 0 0 0 pi/2
其中关节7、8为伪连杆
- 正问题求解
2.1原理
定义:已知各关节的运动参数,求末端执行器的相对参考坐标系的位姿。
求解步骤:
(1)各连杆首尾相连;
(2)确定各连杆间的齐次变换矩阵;
(3)得到最后的总变换矩阵。
且该总变换矩阵内的未知数只有各轴的旋转角度,因此得到旋转角度即可得到六自由度机器人的末端笛卡尔空间坐标。
2.2正问题求解过程
2.2.1 齐次变换矩阵
对DH参数的符号约定
| DH约定参数 | 符号约定 |
|---|---|
| θ | joint angle 关节转角 |
| d | link offset 连杆偏移 |
| a | link length 连杆长度 |
| α(alpha) | link twist 连杆扭角 |
- 参数a是轴z0和轴z1之间沿轴线x测得的距离;
- 角度α是在垂直于x1平面内测得的轴线z0和z1之间的夹角。角度α的正向取值定义为z0到z1,由右手规则来确定。
- 参数d为从远点O0到轴线x1到z0交点之间的距离,该距离沿z0轴线进行测量得到
- θ是垂直于z0的平面内测得的从x0到x1的角度。
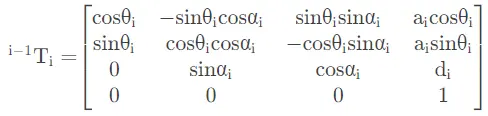
在此基础上,每个齐次变换矩阵T都可以表示为是个基本矩阵的乘积。
标准型的D-H参数其乘积顺序为:
![]()
通用齐次变换矩阵为:
改进型的D-H参数其乘积顺序为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1145
1145

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











