






 本文详细介绍了如何将复合变换矩阵分解为平移(T),旋转(R)和缩放(S)矩阵的过程。首先,通过矩阵的第三列获取平移信息,然后通过极分解技术提取纯旋转矩阵,最后计算缩放矩阵。文章提供了具体的算法实现。
本文详细介绍了如何将复合变换矩阵分解为平移(T),旋转(R)和缩放(S)矩阵的过程。首先,通过矩阵的第三列获取平移信息,然后通过极分解技术提取纯旋转矩阵,最后计算缩放矩阵。文章提供了具体的算法实现。
解构变换矩阵
给定一个转换的复合矩阵,关于组成该转换的任何单个转换的信息就会丢失。 我们如果有一个复合矩阵,怎么能使其分解为TRS三个矩阵呢?即如何完成下述变化:
![]()
其中M是给定的变换矩阵,T是平移矩阵,R是旋转矩阵,S是缩放矩阵。其中提取T矩阵使非常简单的。因为我们知道平移矩阵形式为:
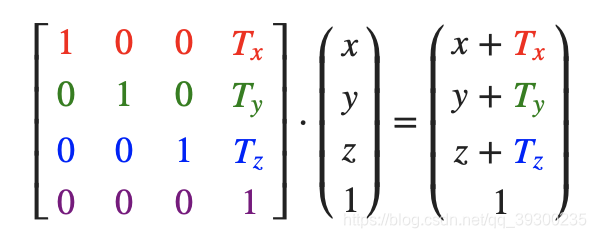
所以我们可以通过M[0][3],M[1][3],M[2][3]来分别找到xyz的位移量。我们可以写出:
T->x = m.m[0][3];
T->y = m.m[1][3];
T->z = m.m[2][3];我们的M矩阵删除掉平移的元素,就只剩下旋转和缩放了。因此在删除平移后,剩下的是上面的3*3矩阵,它们一起表示缩放和旋转。 该矩阵被复制到新矩阵M中以进行进一步处理:
//获取除去平移的新矩阵M
Matrix4x4 M = m;
for (int i = 0; i < 3; ++i)
M.m[i][3] = M.m[3][i] = 0.0f;
M.m[3][3] = 1.0f;接下来就是如何去获取旋转矩阵了。只要获得旋转矩阵,那么缩放矩阵也就可以直接通过:
![]()
计算得出。接下来,我们要提取M的纯旋转分量R。我们将使用一种称为"极分解(polar decomposition)"的技术来做到这一点。 可以证明,矩阵M的极分解可以分解为旋转R和缩放S。该方法通过对M的逆的转置进行连续平均来计算:

直到收敛,此时Mi = R。(很容易看出,如果M是纯旋转,则对其进行求逆再转置平均将使其保持不变,因为其逆等于其转置)。我们可以看旋转矩阵的形式:
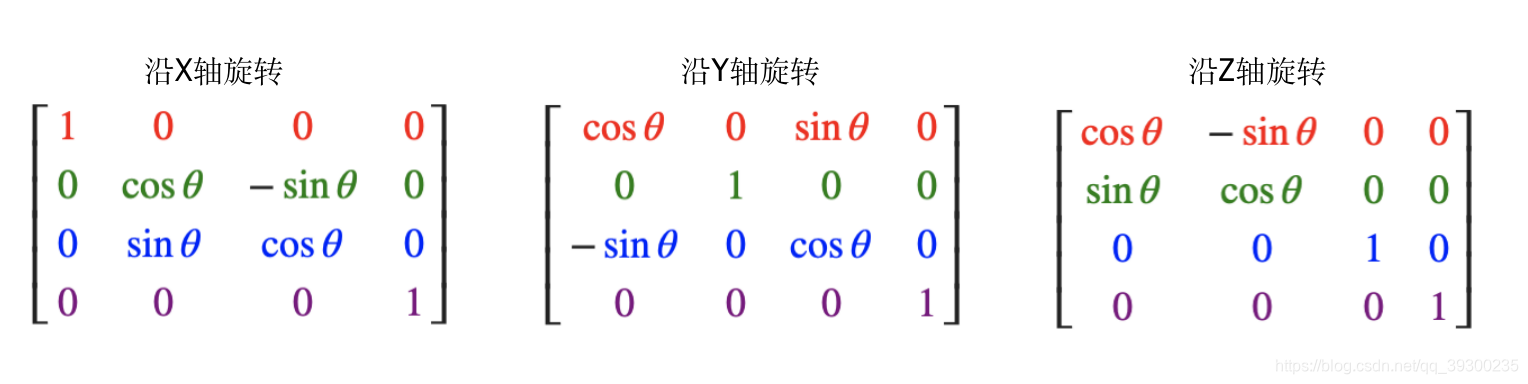
因为旋转矩阵为正交阵,满足上述操作。Shoemake和Duff(1992)讨论了该级数收敛的证明,所得矩阵是最接近M的正交矩阵,这是理想的特性。为了计算该序列,我们迭代应用公式,直到连续项之间的差很小或执行了固定的迭代次数为止。 实际上,该系列通常会很快收敛。我们代码如下:
// 从M分离出R
Float norm;
int count = 0;
Matrix4x4 R = M;
do {
// 计算Mi+1
Matrix4x4 Rnext;
Matrix4x4 Rit = Inverse(Transpose(R));
for (int i = 0; i < 4; ++i)
for (int j = 0; j < 4; ++j)
Rnext.m[i][j] = 0.5f * (R.m[i][j] + Rit.m[i][j]);
// 计算Mi和Mi+1之间的差
norm = 0;
for (int i = 0; i < 3; ++i) {
Float n = std::abs(R.m[i][0] - Rnext.m[i][0]) +
std::abs(R.m[i][1] - Rnext.m[i][1]) +
std::abs(R.m[i][2] - Rnext.m[i][2]);
norm = std::max(norm, n);
}
R = Rnext;
} while (++count < 100 && norm > .0001)//当迭代次数超过上限,或者连续项之间的差足够小,则退出循环;获得R之后就可以轻松计算S:
*S = Matrix4x4::Mul(Inverse(R), M);我们完整的解构代码如下:
void AnimatedTransform::Decompose(const Matrix4x4 &m, Vector3f *T,
Quaternion *Rquat, Matrix4x4 *S) {
// 获取平移T
T->x = m.m[0][3];
T->y = m.m[1][3];
T->z = m.m[2][3];
// 获取除去平移的新矩阵M
Matrix4x4 M = m;
for (int i = 0; i < 3; ++i) M.m[i][3] = M.m[3][i] = 0.f;
M.m[3][3] = 1.f;
// 从M分离出R
Float norm;
int count = 0;
Matrix4x4 R = M;
do {
// 计算Mi+1
Matrix4x4 Rnext;
Matrix4x4 Rit = Inverse(Transpose(R));
for (int i = 0; i < 4; ++i)
for (int j = 0; j < 4; ++j)
Rnext.m[i][j] = 0.5f * (R.m[i][j] + Rit.m[i][j]);
// 计算Mi和Mi+1之间的差
norm = 0;
for (int i = 0; i < 3; ++i) {
Float n = std::abs(R.m[i][0] - Rnext.m[i][0]) +
std::abs(R.m[i][1] - Rnext.m[i][1]) +
std::abs(R.m[i][2] - Rnext.m[i][2]);
norm = std::max(norm, n);
}
R = Rnext;
} while (++count < 100 && norm > .0001)//当迭代次数超过上限,或者连续项之间的差足够小,则退出循环;
// 获取旋转矩阵的四元数形式
*Rquat = Quaternion(R);
// 计算缩放矩阵S
*S = Matrix4x4::Mul(Inverse(R), M);
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









