






SPH(光滑粒子流体动力学)流体模拟实现七:屏幕空间流体渲染(SSF)
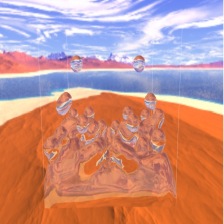
之前都是用的Marching Cube重建流体表面的方法。近来为了做对比实验,尝试了屏幕空间流体渲染的方法。发现屏幕空间的方法不仅在效率上有极大的提升,效果也还是非常可观的,先上两张图:

本文方法来自NYIDIA的文章“Screen Space Fluid Rendering for Games”。本文的流体粒子运动模拟方法使用的是前文的PBF方法,我们已经根据PBF计算完成粒子运动。利用粒子完成屏幕空间渲染的主题思路如下:
- 利用点精灵的方式所有粒子。
- 根据绘制的点精灵记录其深度,其深度计算将点精灵视为球体,保存至深度缓存。
- 根据绘制的点精灵记录其厚度,其厚度计算同样将点精灵视为球体,保存至厚度缓存。厚度不能和深度使用MRT同时输出,因为厚度需要累加,因此我们要关闭深度测试,利用alpha加法混合,累加厚度。
- 利用双边高斯滤波对深度缓存进行滤波,用普通高斯滤波对厚度缓存滤波。并将其用MRT输出至两张帧缓存中。
- 利用过滤完的深度重建法线,并使用一张帧缓存保存法线。
- 使用法线以及厚度缓存,进行水的表面渲染。
其流程图如下:

该图为论文中的原图,我个人认为Thickness Image到Surface Shader这部之间应该还需要一步高斯滤波,并且可以放在Depth Smoothing步骤中同时进行。
接下来我们看具体实现步骤。
绘制点精灵
我们在渲染粒子时,使用几何着色器,在眼空间中将粒子渲染成正方形方片。我们之后所有的计算都在眼空间中进行。然后在片段着色器中,裁剪掉超出圆半径的片段,示例如下:

我们的顶点着色器和几何着色器的代码如下:
//顶点着色器----------------------------------------------------
#version 410 core
layout (location = 0) in vec3 position;
uniform mat4 view;
uniform mat4 projection;
uniform mat4 model;
uniform float pointRadius;
out float PointRadiusView;
out mat4 Projection;
void main()
{
vec4 viewPos=view*model*vec4(position,1.0f);
PointRadiusView=length(view*model*vec4(pointRadius,0,0,0));
Projection=projection;
gl_Position=viewPos;
}
//几何着色器----------------------------------------------------
#version 410 core
layout (points) in;
layout (triangle_strip,max_vertices = 6) out;
in float PointRadiusView[];
in mat4 Projection[];
in mat4 View[];
out float disCP;
out vec3 viewCenterPos;
out vec3 fragPos;
out mat4 Projectionf;
void main()
{
Projectionf=Projection[0];
disCP=PointRadiusView[0];
viewCenterPos=gl_in[0].gl_Position.xyz;
fragPos=vec3((gl_in[0].gl_Position+vec4(-PointRadiusView[0],-PointRadiusView[0],0,0)));
gl_Position = Projection[0]*vec4(fragPos,1.0);
EmitVertex();
fragPos=vec3((gl_in[0].gl_Position+vec4(PointRadiusView[0],-PointRadiusView[0],0,0)));
gl_Position = Projection[0]*vec4(fragPos,1.0);
EmitVertex();
fragPos=vec3((gl_in[0].gl_Position+vec4(-PointRadiusView[0],PointRadiusView[0],0,0)));
gl_Position = Projection[0]*vec4(fragPos,1.0);
EmitVertex();
fragPos=vec3((gl_in[0].gl_Position+vec4(PointRadiusView[0],PointRadiusView[0],0,0)));
gl_Position = Projection[0]*vec4(fragPos,1.0);
EmitVertex();
EndPrimitive();
}
生成深度缓存和厚度缓存
我们之前说过,由于厚度缓存需要关闭深度缓存,并采用加法混合的方式计算,因此厚度和深度缓存需要分布计算输出。在输出深度缓存时,我们需要注意圆片的不同位置深度是不同的,中间厚两边薄,因此中心的深度值较小。我们生成深度缓存片段着色器的代码如下:
#version 410 core
out float FVDepth;
in float disCP;
in vec3 viewCenterPos;
in vec3 fragPos;
in mat4 Projectionf;
uniform float NEAR;
uniform float FAR;
void main(){
float discp=distance(viewCenterPos,fragPos);
vec4 fColor;
if(discp>disCP){
discard;
}
float height=sqrt(disCP*disCP-discp*discp);
//深度
float depthView=(fragPos.z+height);
vec4 clip_space_pos=Projectionf*vec4(vec3(depthView),1.0);
gl_FragDepth=(clip_space_pos.z/clip_space_pos.w)*0.5+0.5;
FVDepth=-depthView;
}
我们裁剪掉超出半径的部分,并利用圆公式,计算深度。我们这里记录眼空间下的深度,因为眼空间z值为负,我们为其取正,方便计算和可视化。我们这里用FVDepth记录线性深度,但仍给gl_FragDepth赋值透视投影变化后的深度,因为这样才能保证深度测试的进行。
厚度缓存需要关闭深度测试,并开启混合,我们的设置代码如下:
glDisable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_ONE, GL_ONE);//加法混合
render(shader,wiThick);//将厚度绘制在厚度缓存中
glDisable(GL_BLEND);
glEnable(GL_DEPTH_TEST);片段着色器代码为:
#version 410 core
out float FragColor;
in float disCP;
in vec3 viewCenterPos;
in vec3 fragPos;
uniform float NEAR;
uniform float FAR;
void main(){
float discp=distance(viewCenterPos,fragPos);
vec4 fColor;
if(discp>disCP){
discard;
}
float height=sqrt(disCP*disCP-discp*discp);
FragColor=2.0*height;
}
我们分别可视化深度缓存和厚度缓存,效果如下:

我们实际的深度和厚度是线性的,且大于1(屏幕输出的颜色会被钳制为0~1),我们根据摄像机远平面,对深度和厚度进行缩放后才能可视化。我们这里仅仅为了观察才对其缩放,实际帧缓存中是未缩放的值,帧缓存中保存的是和HDR一致的浮点型帧缓存,用于保存大于1的值。
我们可以发现,其具有强烈的颗粒感,因此我们之后需要对其做平滑处理。我们观察一下未平滑处理生成的最后效果:

滤波处理
使用MRT(多渲染目标)方法可以在一个着色器内平滑并输出深度和厚度缓存。对厚度缓存,我们直接采用高斯模糊的方法。但是深度缓存并不能直接使用高斯模糊,因为我们需要用深度信息重建法线,如果直接使用高斯模糊过滤深度信息会产生如下效果:

浮于上方的粒子会被平滑至同一表面内,因此我们需要值域(深度)信息。我们这里就使用双边过滤(Bilateral Filter)。双边滤波思维导图如下:

双边滤波公式如下:

其中 是权重和,
是权重和,为空域高斯权值,
为值域高斯权值。其不仅在空域对图像进行滤波,还考虑了值域的影响,我们的深度值正是如此,深度差距较大的值,经过双边滤波,依旧能保存其原本的深度信息。我们的滤波代码如下:
#version 410 core
layout (location = 0) out float Fdepth;
layout (location = 1) out float Fthickness;
in vec2 aTexCoords;
uniform sampler2D depthMap;
uniform sampler2D thickMap;
uniform vec2 blurDir;
uniform float filterRadius;
uniform float spatialScale;
uniform float rangeScale;
const float NEAR=0.1f;
const float FAR=200.0f;
void main(){
vec2 depTexSize=textureSize(depthMap,0);
vec2 thickTexSize=textureSize(thickMap,0);
float depth=texture(depthMap,aTexCoords).r;
float thickness=texture(thickMap,aTexCoords).r;
float sumDep=0.0f,sumThick=0.0f;
float wsumDep=0.0f,wsumThick=0.0f;
for (float x=-filterRadius; x<=filterRadius; x+=1.0) {
float sampleDepth=texture(depthMap,aTexCoords+x*blurDir).r;
float sampleThick=texture(thickMap,aTexCoords+x*blurDir).r;
//空域
float r=x*spatialScale;
float w=exp(-r*r);
//值域
float r2Dep=(sampleDepth-depth)*rangeScale;
float gDep=exp(-r2Dep*r2Dep);
//深度采用双边滤波,厚度只使用高斯滤波
sumDep+=sampleDepth*w*gDep;
sumThick+=sampleThick*w;
wsumDep+=w*gDep;
wsumThick+=w;
}
sumDep/=wsumDep;
sumThick/=wsumThick;
Fdepth=sumDep;
Fthickness=(sumThick);
}
我们滤波后的效果如下:

为了提升速度,我们这里还采用了1D的多次滤波方法,代码如下:
bool firstBlur=1;
for (int i=0; i<blurNumber;i++) {
//绘制模糊
glBindFramebuffer(GL_FRAMEBUFFER,blurFrame[0]);
glViewport(0, 0, downSample*winWidth, downSample*winHeight);
glClearColor(0.0f, 0.0f, 0.0f, 1.0f);
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
wiBlur.use();
if(firstBlur){
wiBlur.setInt("depthMap", 1);
wiBlur.setInt("thickMap", 2);
firstBlur=0;
}else{
wiBlur.setInt("depthMap", 6);
wiBlur.setInt("thickMap", 7);
}
wiBlur.setVec2("blurDir", glm::vec2(1.0/(downSample*winWidth),0.0f));
wiBlur.setMat4("invP", glm::inverse(projection));
renderWinPlane(wiBlur);
wiBlur.close();
glBindFramebuffer(GL_FRAMEBUFFER,blurFrame[1]);
glViewport(0, 0, downSample*winWidth, downSample*winHeight);
glClearColor(0.0f, 0.0f, 0.0f, 1.0f);
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
wiBlur.use();
wiBlur.setInt("depthMap", 4);
wiBlur.setInt("thickMap", 5);
wiBlur.setVec2("blurDir", glm::vec2(0.0f,1.0/(downSample*winHeight)));
renderWinPlane(wiBlur);
wiBlur.close();
}
重构法线
我们已经得到双边滤波后的深度缓存了,我们接下来重构法线,我们这里的方法也很简单,直接用深度还原片眼空间的位置,然后利用位置求解法线,代码如下:
#version 410 core
out vec4 FragColor;
in vec2 aTexCoords;
uniform sampler2D depthMap;
uniform float NEAR;
uniform float FAR;
uniform float aspect;//近平面高:宽
uniform float nearHeight;//近平面高
const float epo=1e-7;
//裁剪空间转换为眼空间
vec3 uvToEye(vec2 texCoord,float depth){
// vec4 clipSpacePos;
// clipSpacePos.xy = texCoord.xy * 2.0f - 1.0f;
// clipSpacePos.z = depth*2.0-1.0;
// clipSpacePos.w = 1;
// clipSpacePos = invMVP * clipSpacePos;
// return clipSpacePos.xyz / clipSpacePos.w;
vec2 deltaUV=(2.0*texCoord-vec2(1.0))*vec2(aspect,1.0);
//计算近平面的平移向量
vec2 deltaView=0.5*nearHeight*deltaUV*depth/NEAR;
return vec3(vec2(deltaView),-depth);
}
vec3 getEyePos(sampler2D depthTex,vec2 texCoord){
float depth=(texture(depthTex,texCoord).r);
return uvToEye(texCoord,depth);
}
void main(){
vec2 texSize=vec2(1.0/textureSize(depthMap,0).s,1.0/textureSize(depthMap,0).t);
//深度
float depthV=(texture(depthMap,aTexCoords).r);
if (depthV>=FAR-1.0) {
discard;
}
//获得当前点的view空间位置
vec3 posEye=uvToEye(aTexCoords,depthV);
//计算微分
vec3 ddu=getEyePos(depthMap,aTexCoords+vec2(texSize.x,0))-posEye;
vec3 ddub=posEye-getEyePos(depthMap,aTexCoords-vec2(texSize.x,0));
if (abs(ddu.z)>abs(ddub.z)) {
ddu=ddub;
}
vec3 ddv=getEyePos(depthMap,aTexCoords+vec2(0,texSize.y))-posEye;
vec3 ddvb=posEye-getEyePos(depthMap,aTexCoords-vec2(0,texSize.y));
if (abs(ddv.z)>abs(ddvb.z)) {
ddv=ddvb;
}
//计算法线
vec3 N=cross(ddu,ddv);
N=normalize(N);
//N=vec3(inverse(transpose(inverse(mat3(invMVP))))*N);
FragColor=vec4(N,1.0);
}
这里由于我保存的深度是线性眼空间的深度,非透视投影计算后的深度,因此我没用投影矩阵的逆矩阵求解片段眼空间的位置,而是使用三角形的相似去求解眼空间的位置:

根据上图,我们只需要近平面的高度和宽高比就能计算片段在眼空间的位置了。近平面的高度为:
float nearHeight=2*NEAR_PLANE*glm::tan(glm::radians(m_camera.Zoom)/2.0);之后我们对u和v方向求微分,两个微分向量的叉乘就是我们的法线了,值得注意的是我们使用两个相反的方向进行微分计算,选择绝对值分量更小的。这是因为如果使用单一的微分,会导致法线在物体边缘突变,而产生错误,示意图如下:

我们看到未经处理的左图,粒子和粒子之间有明显的黑色边缘,而处理后的右图则明显改善。
我们可视化法线,效果如下:

我们发现双边滤波对表面有着极大的平滑提升。
着色计算
所有我们需要的信息我们都获取了,我们接下来便可以进行着色计算了。我们这里只考虑反射部分和折射部分。折射部分又考虑厚度对透射率的影响。我们使用近似菲涅尔方程,计算反射分量:

反射部分使用反射向量索引天空盒的方式。
折射部分使用Beer定律计算透射率:

其中d为厚度,k为透射率控制常量。透射部分,我们根据折射采样2D背景图(该图被我们事先渲染至帧缓存内),折射采样公式为:
texture(bg2D,texcoords-N.xy*thickness*k)其中N为法线,thickness为厚度,k为折射标量(越大折射越明显)。未能透射的部分,我们假定返回默认水体颜色,水体的着色代码如下:
#version 410 core
out vec4 FragColor;
in vec2 aTexCoords;
uniform float NEAR;
uniform float FAR;
uniform float aspect;//近平面高:宽
uniform float nearHeight;//近平面高
uniform float shininess;//高光参数
uniform sampler2D depthMap;
uniform sampler2D thicknessMap;
uniform sampler2D normalMap;
uniform samplerCube cubeMap;
uniform sampler2D cubeMap2D;
uniform vec3 lightPos;//指向光源(眼空间)
uniform mat4 view;
const vec3 diffuseColor=vec3(0.5,0.5,0.5);
const vec3 specularColor=vec3(0.5f);
const vec3 waterRefrectColor=vec3(0.05,0.5,0.8);
const float epo=1e-2;
const vec3 waterF0=vec3(0.15f);
const float refrectScale=2.0;
const float waterK=0.05;
//裁剪空间转换为眼空间
vec3 uvToEye(vec2 texCoord,float depth){
vec2 deltaUV=(2.0*texCoord-vec2(1.0))*vec2(aspect,1.0);
//计算近平面的平移向量
vec2 deltaView=0.5*nearHeight*deltaUV*depth/NEAR;
return vec3(vec2(deltaView),-depth);
}
vec3 culFresnel(vec3 f0,float cosTheta){
return f0+(1.0-f0)*pow(1.0-cosTheta,5.0);
}
//眼空间光照计算
void main(){
vec3 lightDir=normalize((mat3(view)*lightPos));
float depth=texture(depthMap,aTexCoords).r;
if (depth>=FAR-epo) {
discard;
}
vec2 texSize=vec2(1.0/textureSize(normalMap,0).s,1.0/textureSize(normalMap,0).t);
vec3 normal=texture(normalMap,aTexCoords).xyz;
float thickness=texture(thicknessMap,aTexCoords).r;
//phong漫反射(钳制后)
vec3 ambient=diffuseColor*0.1;
vec3 diffuse=ambient+diffuseColor*(max(dot(normal,lightDir),0.0));
vec3 eyePos=uvToEye(aTexCoords,depth);
vec3 veiwDir=normalize(-eyePos);
//blinn-phong镜面反射
vec3 halfDir=normalize(veiwDir+lightDir);
vec3 specular=specularColor*pow(max(dot(normal, halfDir), 0.0), shininess);
//fresnel反射分量
vec3 Rfresnel=culFresnel(waterF0,max(dot(normal,veiwDir),0.0));
vec3 RreflectDir=normalize(mat3(inverse(view))*reflect(-veiwDir,normal));//世界空间
vec3 cubeReflect=texture(cubeMap,RreflectDir).rgb;
//折射分量(t=p-b(N*P))
vec3 Refrect=texture(cubeMap2D,aTexCoords-normal.xy*thickness/FAR*refrectScale).xyz;
//透射率
float transparency=exp(-thickness*waterK);
Refrect=mix(waterRefrectColor,Refrect,transparency);
FragColor=vec4(mix(Refrect,cubeReflect,Rfresnel),1.0);
}
完成渲染效果如下:

整体效果还是比较好的,不过双边滤波还有有一些比较明显的缺点。比如单体粒子的边缘会过于扁平,导致我们看到上面的视频中飞溅的水滴边界明显。对比我们Marching Cube的重建表面效果如下:
SSF方法:

各向异性后的Marching Cube方法:

我们可以看到屏幕空间已经能带来极大的平滑效果,然而其不足就是单一粒子的表现不足。我接下来可能会去尝试更好的滤波方式,使用自适应卷积核半径,以及边界处理方式来得到更好的屏幕空间平滑效果















 969
969

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









