






简介
USART:通用同步和异步收发器
UART:通用异步收发器
当进行异步通信时,这两者是没有区别的。区别在于USART比UART多了同步通信功能。
这个同步通信功能可以把USART当做SPI来用,比如用USART来驱动SPI设备。
同步是指:发送方发出数据后,等接收方发回响应以后才发下一个数据包的通讯方式。
异步是指:发送方发出数据后,不等接收方发回响应,接着发送下个数据包的通讯方式。
同步是阻塞模式,异步是非阻塞模式。
其中SPI IIC为同步通信 UART为异步通信, usart为同步&异步通信。
单工、半双工、全双工
单工数据传输只支持数据在一个方向上传输;
半双工数据传输允许数据在两个方向上传输,但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信;
全双工数据通信允许数据同时在两个方向上传输,因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。
I2C是半双工,SPI的全双工,uart是全双工。
此处截取在网络上查找的比较全解释,由于源地址没找到,这里就不贴出来了
硬件
还是老样子,我们先找开发板的原理图,第一页的系统框图,找到 USART 的所在的位置,如下图所示,找到 USART 所在页的信息。

找到 UART 的接口,可以看到引出的UART 接口,分别为USART2、USART3、USART4。端口分别在
USART2:刷卡的接口 J20
USART3:在PL-2303 的旁边,该接口连接在J21 和PL-2303上,可用串口进行debug
USART4:在板子的电位器的旁边
在此次中我们使用 USART3,接下来查找该接口在 MCU 上的连接的端口。
如下所示

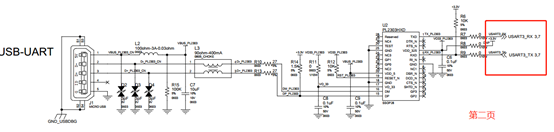

由原理图 我们知道 USART3 的接口
USART_RX ------PE4
USART_TX ------PE5
软件
软件这个地方要结合官方的例程以及 dll 的帮助文档来学习,但是最根本的还是用户手册了,使用库函数开发要熟悉库的使用方法。
时钟初始化函数
在该篇章中我们只讲解例程中相关的库函数,我们使用官方例程中最基本的代码进行讲解,如下图所使是对外设端口的宏,端口的定义和我们查看的电路是对应的。

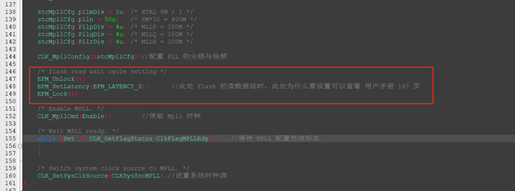
我们来看时钟的初始化配置,在代码中我会详细注释,只需要对照我的注释再结合官方的帮助手册,能快速知道其含义,不知含义的可以找到配置源代码对照用户手册来确定其功能。

下图红框标注的要去用户手册了解一下,用户手册 7.4.1 章。
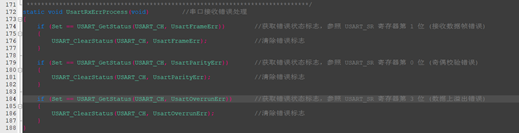
串口的接收错误处理函数
接收错误处理函数其实就是对串口的状态寄存器的读写,可详细对照 USART_SR 寄存器进行查看。在以下的代码中已注释中文。
主函数 main() 处理


到此已将轮询模式下的串口梳理完毕,关于库函数的应用个人觉得根据 dll 库的帮助文档外加用户手册即可。
总结
啰嗦一下结尾了,本来调试这个串口是为了后来调试代码做铺垫的,但是呢,又发现了一个好东西,官方的串口调试文件,可以直接 Printf 的。
这个官方的串口调试这次就不介绍了,篇幅过长看着累。篇幅适中看着舒适点,下篇讲解一下官方串口调试的配置,立马就能上手使用,有时间感兴趣可以深人学习一下。
















 336
336











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











