







近期客户一批设备进行改造后,发现原本运行很好的设备开始批量出现抓手尖端抖动问题,进而对组装作业产生影响。
后来分析原因发现,由于设备空间变小,抓手做了小型化设计。然后就在思考为何抓手变小了就容易发生振动,振动产生的真正原因是什么。
- 抓手尖端抖动抖动问题描述
机器人抓手尖端的抖动是指机器人在执行任务过程中,末端执行器出现的非预期振动或抖动现象。这种抖动可能表现为位置抖动、姿态不稳定或运动轨迹不平滑等问题。抖动现象的严重程度因机器人类型、工作环境和任务要求而异,但在精密操作、高精度装配等应用场景中,即使是微小的抖动也可能导致任务失败。机器人抖动现象通常包括以下特征:
- 频率和幅度变化:抖动频率和幅度可能随负载、速度和运动轨迹而变化
- 位置相关性:抖动程度可能与机器人当前位置和姿态有关
- 动态特性:在运动过程中抖动更为明显,尤其是在加减速阶段
- 残余振动:即使在目标位置停止后,末端执行器可能仍然存在持续一段时间的振动
- 抓手尖端抖动问题产生原因
从抖动形成机理上说,它是个非常复杂的问题,涉及机械、电气、算法等各方面。从抖动形成的根本原因来说,还是机器人手臂存在柔性导致。
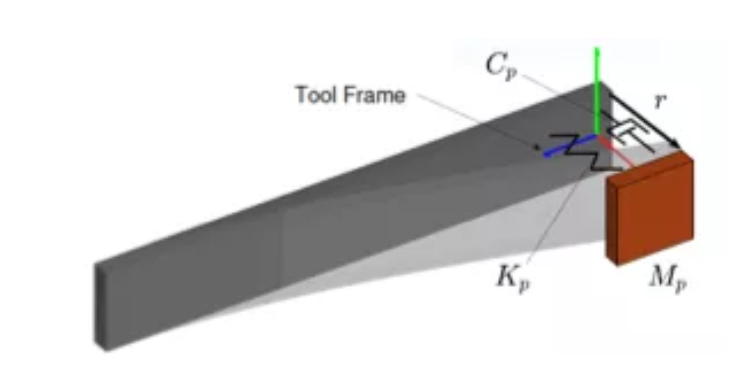
为了驱动沉重的负载以及同样沉重的机器人本体,机器人的关节中采用高减速比的减速器来放大驱动力矩。成熟的机器人减速器比如RV减速器和Hamonic Drive具有体积小,刚度高,几乎无死程差的特点,然而与高刚性的机器人本体结构相比,减速器的刚性相对而言弱了许多,因此成为了柔性的一个主要来源。从减速器引入的柔性被称为关节柔性。除了关节柔性之外,机器人自身连杆结构或者其所携带的工具以及负载也可能引入柔性,这种柔性被称为连杆柔性。一般来说,在机器人的设计阶段就会对自身连杆结构进行优化以增强结构刚性,机器人自身连杆的柔性几乎可以忽略不计。工业机器人的连杆柔性主要来源于某些大尺寸的工具或负载。
由于机器人手臂的柔性,可能在机器人动作过程中出现共振。或者高速高加速的运动中,机器人结构中柔性最强的部位会发生相对较大的弹性变形,在机器人运动停止时,弹性变形的恢复会导致明显的振动。
- 抓手尖端抖动问题对策
首先考虑通过提高系统的刚性来抑制振动。如加强机器人手臂本身设计的的刚性、机器人安装底座的刚性以及抓手设计的刚性,从而更好地抵抗变形,保持稳定性和精确性。
在无法改变硬件刚性的情况下,需要从避开共振和振动抑制方面考虑。
根据机器人的动作、抓手质量、抓手惯性的组合,机器人机械臂的固有振动频率接近于机械臂驱动力的振动频率,从而产生共振导致。关于固有频率和共振频率的说明如下:
-
固有频率:
- 固有频率是系统在没有外部激励的情况下自然振动的频率。每个机械系统都有其固有频率,取决于系统的质量、刚度和阻尼等参数。它是系统内在的属性,不随外部条件改变。
- 例如,一个简单的弹簧-质量系统有一个固有频率,当外部激励的频率接近这个固有频率时,系统会发生共振。
-
共振频率:
- 共振频率是指当外部驱动力的频率与系统的固有频率相匹配时,系统会发生共振现象的频率。在共振频率下,系统吸收能量的效率最高,振动幅度达到最大。通常,共振频率与系统的固有频率接近。
- 在共振频率下,系统的响应振幅会显著增大,可能导致系统振动过大,甚至损坏。
关于避开共振和振动抑制的方法如下所示:
1、通过降低机器人的速度及加减速,改变外部驱动频率;
2、调整机器人模型位置增益或者速度环增益参数;
3、使用机器人自带的振动抑制模式功能
如三菱的MVTUNE 4指令振动抑制功能、汇川机器人自学习振动抑制功能、FANUC的Learning Vibration Control (LVC)自学习功能(需要额外加速度计传感器)、 珞石机器人振动抑制功能(需要额外三轴加速度计传感器)、EPSON振动抑制功能(机器人本体内部安装有陀螺仪传感器)、ABB振动抑制功能(Tune Servo参数TUNE_DF)等。
通过硬件变更或者程序及参数优化方法,实现振动抑制,具体实现过程还需要一定的经验或者调试。
以上是我的一些思考,本文至此结束,希望可以帮助到您。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









