







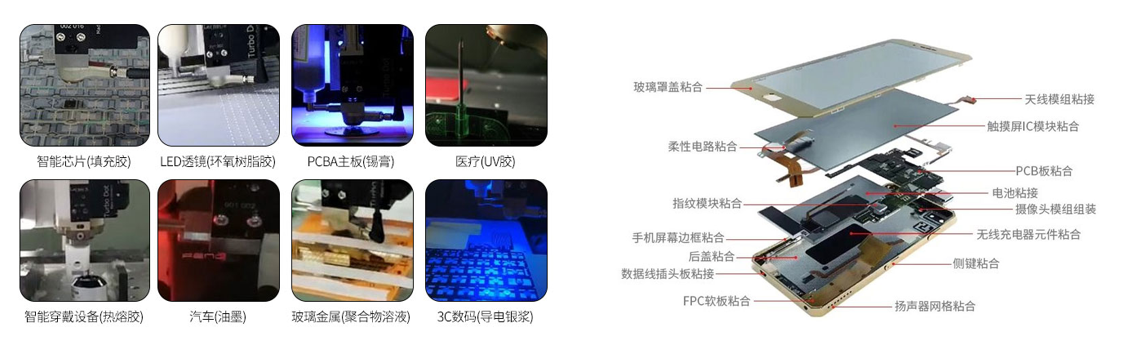
涂胶工艺广泛应用于汽车、3C、家电、医疗、制鞋等行业。
涂胶系统构成
一般的涂胶系统根据组成可以分为供胶系统、控制系统、动作系统和检测系统。
供胶系统一般由胶枪、气动或电动马达、供胶泵、计量泵、加热胶管、温控单元等构成。
而供胶系统中供胶泵分为单泵和双泵。双泵的好处是较少换泵的时间,并且提高系统稳定性。
控制系统将整体设备中的上下料系统、供胶系统、动作系统以及视觉系统进行连接控制。
动作系统一般分为单轴动作、多轴动作以及当前越来越多的机器人动作。机器人凭借较好的柔性、较高的精度以及与视觉系统之间的亲和性得到越来越广的应用。
检测系统通常对涂胶后胶宽、胶高、断胶、多胶的检测。
技术要点
1、涂胶工艺
如需要根据工件的性质、涂胶的粘性、要求的胶线厚度、涂胶速度、涂胶轨迹精度等要求,确定机器人的线速度和供胶装置的速度等参数。
2、供胶技术
为保证胶线质量,以及系统对机器人运动速度的响应,需要对胶体流量和速度进行同步控制。并且包含双泵切换、温控等技术。
3、仿真技术
通过仿真技术离线方式方便的获取动作轨迹数据、直观的显示出涂胶机器人的运动情况 。
4、传感器技术
通过2D/3D视觉识别物体轮廓,从而生成涂胶路径或者对现有涂胶路径进行补偿,从而能够提高系统的柔性。以及2D/3D视觉对于涂胶后的胶路进行实时检测的技术。
机器人相关功能要求
1、离线轨迹生成功能
需要机器人通过利用3D数据离线方式获取工件的点位或轨迹信息。
2、样条曲线功能
机器人可以以指定的速度沿着连接所指定的路径点顺畅进行动作的功能。
3、外部控制点样条曲线功能
机器人将所夹持的工件的边缘路径点沿着任意的坐标系原点以指定的速度顺畅进行动作的功能。
4、程序方式迹生成功能
可以将以太网通信等将上位机等发送过来的路径点,通过程序方式自动生成样条曲线并执行的功能。
5、工具点自动设定功能
涂胶作业中通常会涉及到需要更换涂胶头的时候。需要机器人可以和光电传感器等配合,高速高精度的设置机器人工具点,从而无需示教、快速恢复作业。(可以参考此前的文章如何低成本、高精度、快速实现机器人工具点自动标定-CSDN博客)
6、追踪功能
为了提高作业效率,有些涂胶作业会在不停止传送带的情况下进行涂胶作业。需要机器人具备追踪功能,可以实现高速高精度涂胶作业。
本文到此结束,希望对您有所帮助。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









